引言 随着人工智能的热度不断增加,很多人看到了机器学习的许多优势之处。这个系列将从下载pycharm编译器,搭建pytorch环境,利用open……继续阅读 » 小白 5年前 (2021-04-26) 2599浏览 0评论2284个赞
如果不了解ROS 2,推荐先体验一下吧,具体教程:机器人操作系统二(ROS2)- 启程 Departure ROS 2项目的目标是继承ROS 1的优点并改进不合……继续阅读 » zhangrelay 5年前 (2021-04-26) 2807浏览 0评论2356个赞
3.6 ROS小车启动功能包编写……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 3225浏览 0评论256个赞
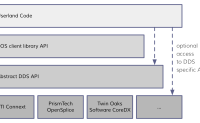
在每届的全国大学生电子设计竞赛中,DDS作为信号源、以及通信里面本振、波形合成的基本方式,几乎成了必考的技能,虽然考察的角度不同,但核心都是一个 – 通过数字的方式得到你需要的某种频率的某种幅度的某种波形。 在测试测量领域有另一个概念 – AWG(任意波形发生器)是……继续阅读 » 电子森林 5年前 (2021-04-26) 2441浏览 0评论1483个赞
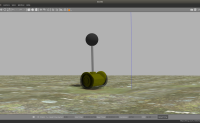
倒立摆是自动控制原理或现代控制理论等经典分析案例,博客有数篇博文针对这样案例给出题目和分析: ……继续阅读 » zhangrelay 5年前 (2021-04-26) 2190浏览 0评论1080个赞
由于用Notability写的公式,有些是换页的,导致被分解开了,也想到图片可能不清晰,可以通过下面链接下载PDF以及配套代码~.~ 百度网盘链接:https://pan.baidu.com/share/init?surl=UhYExJC……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 2982浏览 0评论2881个赞
ROS中catkin CMakeLists.txt的内容。 CMakeList.txt文件是CMake编译系统编译软件包过程的输入文件。任何CMake兼容包都包含一个或多个CMakeLists.txt文件,这些文件描述了如何编译代码以及将其安装到哪里。将CMakeL……继续阅读 » 很不专业 5年前 (2021-04-26) 2609浏览 0评论1141个赞
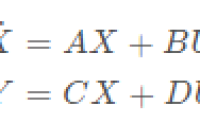
Hello,欢迎做客我的博客! 在动力学仿真中,我们不得不采用迭代的方法进行数值计算,这个时候我们会用到离散化的数学模型。 可是,我们在建立模型时,考虑的都是连续的情况……继续阅读 » 西涯先生 5年前 (2021-04-26) 2524浏览 0评论1742个赞
引言 接上篇,我们搭建完了环境,并下载好所需要的功能包后,我们需要对图像首先进行一个预处理,由于是教大家入门pytorch,因此CV部分的预处理……继续阅读 » 小白 5年前 (2021-04-26) 3106浏览 0评论2476个赞
嘿嘿嘿我回来了! 李群和李代数真的让我头大,做为一个本科生,又不像高博他清华大学本科线性代数就先讲群,我们都是从矩阵起步的。所以很多数学知识真的是从零学起,又夹杂了很多近世代数和抽象代数的知识,就更难以理解了。我不光记录下了学习的笔记还有一些,学到一定地方的感悟。↓……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 1976浏览 0评论2554个赞
自定义Action消息 Action的消息规范主要是为了描述Client端和Server端交互的数据格式,具体来说,就是为了去描述Goal,Feed……继续阅读 » 很不专业 5年前 (2021-04-26) 2348浏览 0评论1360个赞
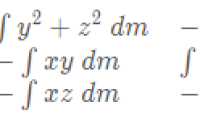
惯性张量是什么? 惯性张量是用于描述刚体转动惯性的一个量,并且它是一个矩阵。它通常表示为: ……继续阅读 » 西涯先生 5年前 (2021-04-26) 1881浏览 0评论2803个赞
这篇教程简要说明,在CoppeliaSim仿真环境中,使用ROS2接口,如果是ROS 2 Dashing,直接使用安装包中的compiledRosPlugins文件夹下的libsimExtROS2Interface.so。 ……继续阅读 » zhangrelay 5年前 (2021-04-26) 3151浏览 0评论2453个赞
效果:安装步骤:# ROS Kinetic:$ sudo apt-……继续阅读 » 很不专业 5年前 (2021-04-26) 3012浏览 0评论2123个赞
封面就是我的双目相机了 —— MYNT EYE D小觅双目摄像头深度版系列结构光双目深度惯导相机。之后会做测评的视频?或者博客吧~ 下面还是重头戏,看了上一期 ……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 2182浏览 0评论2834个赞
刚体动力学基础学习 ……继续阅读 » 西涯先生 5年前 (2021-04-26) 2748浏览 0评论249个赞
由于最近要在OpenCV3中使用SIFT和SURF特征提取,而自从OpenCV2升级到OpenCV3版本后,SIFT、SURF等这些算法都被移出opencv默认项目库,而被放到叫opencv_contrib的项目库。因此需要手动下载opencv和opencv_contrib的源码……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3076浏览 0评论894个赞
背景和初衷 小弟是University of Colorado at Boulder的一个在读学生.在ARPG(Autonomous Robotics and Perception Group)实验室学习. 自己当初入门ROS的时候……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 2909浏览 0评论456个赞
前段时间周更的vSLAM基础系列突然停更了,也是因为考试周时间不足以让我在看书和写博客之间调剂了。希望朋友们能体谅一下。 ……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 2020浏览 0评论2491个赞
又过了好久了…Em…上一讲我们不甚详细地提及了EKF扩展卡尔曼滤波,这一讲我们就来说扩展卡尔曼滤波在SLAM里的应用。需要再次提及的是EKF-SLAM是比较早期的应用,但是因为简单好懂,所以用来帮助我们来熟悉一下SLAM的过程。 一旦要使用扩展卡尔曼滤波,我……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 2881浏览 0评论827个赞
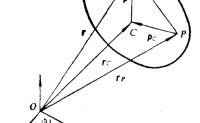
关于机器人运动学与动力学建模的几点迷思疑问1:运动学应该从速度开始推还是从位置开始推? 为什么会产生这样的疑问?我们可以从下面这个问题开始!……继续阅读 » 西涯先生 5年前 (2021-04-26) 2932浏览 0评论832个赞
前言:几天前就在打浦桥程序员公众号上了解到MATLAB 2020b更新的消息,过了几天才在Mathwor……继续阅读 » 二民院小学生 5年前 (2021-04-26) 2710浏览 0评论714个赞
发布接收int类型消息 第一篇文章我们发布接收了string类型的消息.我们提到在ROS里发布的消息必须是在ROS中定义了的.就是如果你要发布一个string类型的消息,你不能直接发布一个std::string,你得发布一个std_msgs::S……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 2764浏览 0评论483个赞
引言 这篇博客介绍的是,如何在windows环境下搭建基于CMake和GCC的开发环境。这里使用的编辑器是VSCode。害怕麻烦的同学不应该搭建这个开发环境,应该直接使用VS Studiao的集成开发环境。 而我之所以要搭建这个环境,是因为为了方便……继续阅读 » 西涯先生 5年前 (2021-04-26) 2750浏览 0评论1730个赞
看最新动态,ROS1基本稳定更新维护,ROS2研发进度超快。 现有的ROS1功能包几乎涵盖了所有主流机器人和所有主流机器人学算法,同时这些大部分开源。 未来主流技术主要有如下类别: ……继续阅读 » zhangrelay 5年前 (2021-04-26) 3248浏览 0评论2598个赞
引言 接上篇,这部分是图像预处理的后百分之五十的工作,也就是把上期代码识别出的车牌进行字符分割。 下面进入正题~ ……继续阅读 » 小白 5年前 (2021-04-26) 2859浏览 0评论643个赞
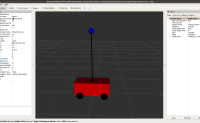
之前,上过机器人或者单片机或者计算机或者控制的相关课程,急需一款适用于多课程的融合性机器人。 自己搭建机器人如下: ……继续阅读 » zhangrelay 5年前 (2021-04-26) 1987浏览 0评论2317个赞
之前,现代控制理论,研究过一些倒立摆和自平衡小车,现在用ROS+Gazebo环境尝试一下。 ROS自平衡机器人仿真(机器人操作系统+现代控制理论融合案例) 找了一些案例都是……继续阅读 » zhangrelay 5年前 (2021-04-26) 2952浏览 0评论497个赞
在库中安装如下: ……继续阅读 » zhangrelay 5年前 (2021-04-26) 2920浏览 0评论317个赞
……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 1675浏览 0评论1117个赞
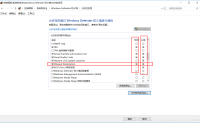
描述:本来VMware用着很好,升级系统之后第二天发现打开软件特别慢,特别是还转圈圈,VMware打开需要半天才进入、打开系统很慢、运行很慢,其实导致这个软件的原因就是软件被防火墙阻截了!……继续阅读 » TianXin1432516744 5年前 (2021-04-26) 2974浏览 0评论2051个赞
在阅读本文之前,推荐阅读前篇ROS机器人TF基础和全部资料文档: TF基础:https://blog.csdn.net……继续阅读 » zhangrelay 5年前 (2021-04-26) 3586浏览 0评论672个赞
扩展卡尔曼滤波定位是马尔可夫定位中的一种特殊情况,在EKF定位算法中,我们假设地图是由一系列特征组成的,并且每个特征都是独特的。在t时刻的任何一个点,机器人可以通过传感器获得由与附近特征的距离、方向组成的向量: Z_t =……继续阅读 » Z 5年前 (2021-04-26) 3049浏览 0评论2011个赞
1.安装驱动文件libfreenect $ git clone https://github.com/OpenKinect/libfreenect2.git $ cd libfreenect2 $ sudo apt-get in……继续阅读 » 很不专业 5年前 (2021-04-26) 2943浏览 0评论665个赞
分上下篇吧,一共有七八十个公式呢 ^-^ 写在一篇就太长了 ……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 2353浏览 0评论2139个赞
上一讲我们讲了如何发布接收int,float和array类型的消息,这些也都算是c++自有的消息,被归纳在ROS中的std_msgs这个命名空间下(命名空间skr啥?).这讲我们来看看如何发布接收ROS自己独特的message类型:PoseStam……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 3582浏览 0评论249个赞
文章目录本文软件版本loadrobotimportrobotri……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 1919浏览 0评论2007个赞
什么是SDCC? SDCC是可重定目标的,优化的标准C(ANSI C89,ISO C99,ISO C11)编译器套件,针对的是基于Intel MCS51……继续阅读 » zhangrelay 5年前 (2021-04-26) 3594浏览 0评论1540个赞
本文作者:陈瓜瓜 由于下一讲要讲到怎么在类中pub和sub消息.那么考虑到有些同学对类不甚熟悉.我们稍微回顾一下.但关于类网上一查其实一大堆东西,而且都是从入门讲起.所以我这儿肯定不会重复书写那些内容.要介绍的几个东西,其实本来要用得好的话蛮复杂,我们只会涉及到皮毛……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 2171浏览 0评论1895个赞
接着上篇:从零手写VIO——(三)基于优化的 IMU 与视觉信息融合(上篇) 再次说明一下,本博客目前只是我在看深蓝时记录的,当然会有很多 PPT 上的内容,加上一点自己学的……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 2401浏览 0评论2488个赞
简介 使用机器人操作系统ROS2和机器人中间件框架系统RMF进行多机器人系统集成,高层规划及其应用等。……继续阅读 » zhangrelay 5年前 (2021-04-26) 1905浏览 0评论912个赞
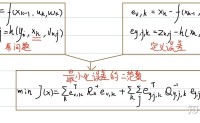
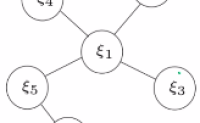
滑动窗口算法 图优化基础 在十四讲中,我们已经接触了图优化以及如何使用 g2o 进行后端优化。 圆圈 Vertex:表示顶点,需要优化估计的变量。……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 3831浏览 0评论1368个赞
……继续阅读 » qiefw_3173 5年前 (2021-04-26) 4065浏览 0评论2257个赞
学习ROS2机器人操作系统第一步要做什么呢?下载最新的官方文档到本地: 在github搜索ros2_documentation,使用git或者浏览器下载均可。 ……继续阅读 » zhangrelay 5年前 (2021-04-26) 3374浏览 0评论362个赞
从高斯分布到信息矩阵 某个状态 ……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 2732浏览 0评论2575个赞