文章目录教程描述准备工作 2.1 创建工作空间 2.2 创建ROS硬件描述包小车模型示意图创建urdf……继续阅读 » 懒小象 5年前 (2021-04-26) 3231浏览 0评论1569个赞
之前对MoveIt的印象一直停留在使用Rviz拖动机械臂模型,然后再点击“plan”实现轨迹的规划,点击“execute”执行机械臂的运动这种比较浅层的功能。实际我们在控制机械臂运动的时候大都是通过编程的方式控制,而不是Rviz的图形化控制。 在MoveIt中有三个主要的控制接口……继续阅读 » 编程芝士 5年前 (2021-04-26) 2428浏览 0评论1213个赞
一、无人机控制中的坐标系 无人机运动学中,有三种需要了解的坐标系 1.1、地球中心坐标系(ECEF) ……继续阅读 » autotian 5年前 (2021-04-26) 2588浏览 0评论252个赞
开发平台:unity2017 个人版 目前实现的效果: ……继续阅读 » 永望 5年前 (2021-04-26) 2934浏览 0评论571个赞
Dubins曲线简介 Dubins曲线是在满足曲率约束和规定的始端和末端的切线方向的条件下,连接两个二维平面(即X-Y平面)的最短路径,并假设车辆行驶的道路只能向前行进。如果车辆也可以在反向行驶,……继续阅读 » 懒小象 5年前 (2021-04-26) 1883浏览 0评论2745个赞
主题 之前我们在 (Python)从零开始,简单快速学机器仿人视觉Opencv—运用三:物体运动跟踪 中已经学习了关于Meanshift和Camshift的运算,本章节将……继续阅读 » Eragonl 5年前 (2021-04-26) 2008浏览 0评论997个赞
理解飞行模式对于能够操纵运行Ardupilot和MAVLink协议的无人系统至关重要。 Ardupilot定义了几种飞行模式。 在本节中,我们介绍最重要且更常见的交易模式。 1、The STABILIZE mode 稳定……继续阅读 » autotian 5年前 (2021-04-26) 2395浏览 0评论597个赞
具体介绍见就上一篇文章:《MoveIt简单编程实现机械臂运动(正运动学)》 使用的是probot机械臂模型,还是在关节空间下。首先看一下逆运动学规划的例程,逆运动学规划简单的……继续阅读 » 编程芝士 5年前 (2021-04-26) 3549浏览 0评论2853个赞
4.IMU预积分 IMU预积分主要干了2件事,第一个是IMU预积分获得α、β、γ值,另一个是误差传递函数的获取。本部分的流程图如下图所示。 ……继续阅读 » iwande 5年前 (2021-04-26) 3559浏览 0评论2814个赞
……继续阅读 » 慕羽★ 5年前 (2021-04-26) 1754浏览 0评论1070个赞
嗨伙计们,我又来啦~ 想了这么长时间,终于准备着手了!今天跟大家一起分享下webots中是如何实现LQR控制的。 今天就不多啰嗦了,下面开始进入我要跟大家分享的内容。 还是老样子,我们先来介绍一下文章安排:第一部分,我们将在webots中……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 3670浏览 0评论402个赞
写在前面 下面程序中涉及到如下两部分内容: 正逆运动学算法:五自由度机械臂正逆运动学算法(C语言+Matlab) 简……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 2809浏览 0评论2670个赞
Moveit在规划路径的时候考虑如何躲避障碍物的问题,Moveit可以实时的检测空间中的障碍物,并规划处轨迹绕过障碍物。 在场景中加入障碍物方式 ……继续阅读 » 编程芝士 5年前 (2021-04-26) 2393浏览 0评论108个赞
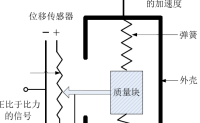
1、三轴加速度计 ……继续阅读 » autotian 5年前 (2021-04-26) 1808浏览 0评论452个赞
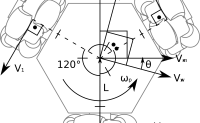
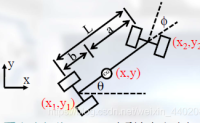
文章目录运动学模型小车坐标系下运动模型分析小车坐标系与世界坐标系转换小车坐标系转换到世界坐标系……继续阅读 » 懒小象 5年前 (2021-04-26) 2147浏览 0评论2684个赞
简介 今天来分享一下我是如何用最短的时间进行智能小车的PID调速的。在疫情期间比较无聊,在某宝买了一个智能小车底盘和一堆零件,基于Arduino Due和树莓派进行开发,Due负责底层控制,树莓派进行上层控制器开发,比如斯坦利控制器或者模型预测控制器进行轨迹跟踪……继续阅读 » ScottieHan 5年前 (2021-04-26) 3510浏览 0评论272个赞
主题 在本节中我们将描述一种称为图像修复的区域填充算法。 这种图片修复算法的作用是可以通过使用OpenCV模块来进行图片上异常划痕或斑点等噪线、噪点的修复,而且代……继续阅读 » Eragonl 5年前 (2021-04-26) 2954浏览 0评论2828个赞
最近做项目需要用到动态配置PID参数,于是将dynamic_reconfigure学了一下,在此开个博文记录一下过程,同时也希望对有需要的同学能起到一些帮助。 ……继续阅读 » 小黑鸭 5年前 (2021-04-26) 2401浏览 0评论1538个赞
前两篇文章是关于在关节空间中进行机械臂的运动控制: MoveIt简单编程实现关节空间机械臂运动(逆运动学) ……继续阅读 » 编程芝士 5年前 (2021-04-26) 3537浏览 0评论1410个赞
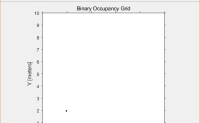
Matlab航迹规划仿真——OBG栅格详解 文章目录 ……继续阅读 » 懒小象 5年前 (2021-04-26) 2827浏览 0评论399个赞
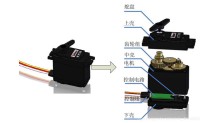
本文将会系统阐述在做智能车过程中舵机学习的注意事项 当拿到一个舵机我们应该怎么做?事先应该去做什么准备验证工作? &n……继续阅读 » 不合格的engineer 5年前 (2021-04-26) 1719浏览 0评论950个赞
引言 我们已经知道如何已知角度去推算机械臂末端的位置,那么如何由位置反推出机械臂到达需求位需要的角度呢? ……继续阅读 » aic1999 5年前 (2021-04-26) 2878浏览 0评论2639个赞
@[toc] 1. POMDP用途 常用的简称: Markov decision proces……继续阅读 » 懒小象 5年前 (2021-04-26) 3551浏览 0评论2419个赞
1、前言 前一段时间看过我文章的都知道,我打算写一个SLAM源码阅读的文章,然后,我就去读了Gmapping的源码,感受良多,不足的地方是源码太乱了,阅读起……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 2091浏览 0评论2772个赞
……继续阅读 » 慕羽★ 5年前 (2021-04-26) 2942浏览 0评论532个赞
开源自主导航小车MickX4 目录 1 ROS底盘运动控制 1.1 小车控制流程图 1.2 小车控制核心代码分析 1.2.1 小车核心代码-遥控器解析 1.2.2 小车核心代码-电机反馈数据 1.2.3 小车核心代码-PI……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 3518浏览 0评论907个赞
直接总结吧:这一节描述的视觉里程计就是检测特征点,特征点匹配,匹配上以后算位姿和深度。 特征点检测: Fast特征点:……继续阅读 » 微鉴道长 5年前 (2021-04-26) 1725浏览 0评论327个赞
在目标跟踪时,摄像头提供实时的图片信息,我们需要识别出图片目标,且输出目标在图片中的位置,为后续的控制提供条件。在demo中,我是借助darknet_ros实现这一目标。当然,这一模块可以替换成性能更优秀的识别算法。 darknet_ros为yolov3在ros下的……继续阅读 » cabinx 5年前 (2021-04-26) 3564浏览 0评论2098个赞
事前准备 使用库: opencv,可以用pip install opencv-python来安装(注意!不是pip install opencv!!!) numpy(这个本节不用,但是以后经常要用到) <……继续阅读 » Eragonl 5年前 (2021-04-26) 1582浏览 0评论538个赞
目录 1.两种智能小车的构造简介2.需要的软件与硬件3. Car-like小车建模与仿真3……继续阅读 » ScottieHan 5年前 (2021-04-26) 1784浏览 0评论2465个赞
引言 在真实需求中,当我们的机械臂已经拿到了一支笔,那怎么设定轨迹让它画一只鸭子之类的呢,或者怎么样让机械臂拿到杯子后挂在墙上呢?我们需要知道手臂状态(位置状态、速度状态)和时间的关系,从而拟合出一条连续(重点)的……继续阅读 » aic1999 5年前 (2021-04-26) 2461浏览 0评论2289个赞
《一》实现步骤: (1)启动 Gazebo 模拟器; (2)起飞无人机并开始录制一个 rosbag; (3)控制无人机围绕建筑物绕圆周飞行一圈; (4)停止 rosbag 录制并使用提供的脚本提取图片; (5)使用提供的网站构建模型 前期准备: (1)更新GAAS ……继续阅读 » 永望 5年前 (2021-04-26) 1991浏览 0评论341个赞
准备工作 使用库: numpy opencv 任务1 用摄……继续阅读 » Eragonl 5年前 (2021-04-26) 3416浏览 0评论2803个赞
这章的内容不多,但是很奇妙的和上一章的串起来了。这里我简单总结一下光流法和直接法,主要想在最后总结和比较一下两个这节和上一节尤其是雅克比矩阵推导上的区别。雅克比矩阵的内容非常关键,如果不能充分理解它们的含义,前端基本就没有办法使用g2o来进行图优化。……继续阅读 » 微鉴道长 5年前 (2021-04-26) 3552浏览 0评论2808个赞
引言 实际应用中,我们也会经常使用到直线轨迹,然而(5)中讲的三次多项式并不能满足我们的直线轨迹。然而如果单纯地使用直线轨迹,线段间的转折点会让速度不连续,如何又能使用直线轨迹又能满足速度连续呢?在这里引出一次多项……继续阅读 » aic1999 5年前 (2021-04-26) 2889浏览 0评论776个赞
全文框架……继续阅读 » WillChan_ 5年前 (2021-04-26) 2209浏览 0评论2574个赞
模拟退火算法简介 模拟退火是一种通用概率算法,可来在固定时间内寻求在一个大的搜寻空间内找到的最优解,也可以用来求解函数最优解。模拟退火是S. Kirkpatrick, C. D. Gelatt和M. P. Vecchi在1983年所发……继续阅读 » 懒小象 5年前 (2021-04-26) 2755浏览 0评论262个赞
在目标跟踪时,摄像头提供实时的图片信息,我们需要识别出图片目标,且输出目标在图片中的位置,为后续的控制提供条件。在demo中,我是借助darknet_ros实现这一目标。当然,这一模块可以替换成性能更优秀的识别算法。 darknet_ros为yolov3在ros下的……继续阅读 » cabinx 5年前 (2021-04-26) 1532浏览 0评论567个赞
基本依赖项 pip install \ pandas \ jinja2 \ pyserial \ cerberus ……继续阅读 » 永望 5年前 (2021-04-26) 2850浏览 0评论2905个赞
从本文开始,在之后的一段时间里,我会通过本系列文章,详细介绍如何从零开始用51单片机去实现智能小车的控制,本文作为本系列的第一篇文章,主要介绍如何让小车动起来。 ……继续阅读 » 慕羽★ 5年前 (2021-04-26) 3602浏览 0评论791个赞
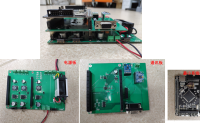
本文将系统阐述如何做好电磁车前期的硬件与软件准备工作 硬件部分 认识电感 工字电感 感应赛道交变磁场,产生感应电动势,后续电路……继续阅读 » 不合格的engineer 5年前 (2021-04-26) 2606浏览 0评论2810个赞
目录C语言知识点:……继续阅读 » autotian 5年前 (2021-04-26) 2676浏览 0评论1446个赞
添加激光传感器1 添加2D雷达实体2 添加3D雷达实体参考资料 激光雷达的添加比较……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 2484浏览 0评论1635个赞
目录树莓派控制无人机实现定点降落(一)——树莓派4安装ROS(Kinetic)1、安装ROS仓库2……继续阅读 » CyrilSterling 5年前 (2021-04-26) 2416浏览 0评论244个赞
这一章的内容并不多,不像视觉里程计那章的内容那么厚。但是我认为它是整个SLAM十四讲中最难的一章,难点主要在于卡尔曼滤波器的推导涉及到一屁股的数学公式,非常的讨厌,如果不能静下心来,就很容易被吓到。但是真正看懂以后实质上它是比较简单的,并没有用到什么太过复杂的变换……继续阅读 » 微鉴道长 5年前 (2021-04-26) 2817浏览 0评论2078个赞