目录 1、什么是MAVLink……继续阅读 » 5年前 (2021-04-26) 2929浏览 0评论243个赞
一、无人机控制中的坐标系 无人机运动学中,有三种需要了解的坐标系 1.1、地球中心坐标系(ECEF) ……继续阅读 » 5年前 (2021-04-26) 3656浏览 0评论2757个赞
理解飞行模式对于能够操纵运行Ardupilot和MAVLink协议的无人系统至关重要。 Ardupilot定义了几种飞行模式。 在本节中,我们介绍最重要且更常见的交易模式。 1、The STABILIZE mode 稳定……继续阅读 » 5年前 (2021-04-26) 3642浏览 0评论1363个赞
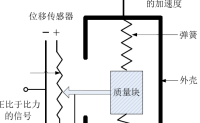
1、三轴加速度计 ……继续阅读 » 5年前 (2021-04-26) 2644浏览 0评论475个赞
目录C语言知识点:……继续阅读 » 5年前 (2021-04-26) 1654浏览 0评论658个赞
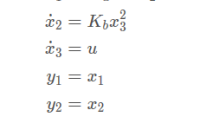
1、可观性1.1、可观性定义 客观性即指通过系统输出能否反映系统初始状态(状态的变化能否由输出反映出来); 形式上如果根据一系列的输出及控制输入可以在有限时间内唯一地确定系统状态则系统客观; 其定义中存在三个关键词:动态系统、状态、输出。 ……继续阅读 » 5年前 (2021-04-26) 3413浏览 0评论1856个赞
一、MATLAB基本功能1、MATLAB帮助 (1)help函数 help可用于查看对应函数的帮助文本 ……继续阅读 » 5年前 (2021-04-26) 1853浏览 0评论391个赞
此文目的:旨在详细描述如何自制一个小型ROS机器人,实现自制ROS机器人的移动控制、建图、自主导航,文章从硬件到软件均有详细讲述,提供全套下位机、上位机程序源码,SolidWorks三维建模,CAD图纸,电路图纸,我的本科毕设论文、挑战杯说明书、PP……继续阅读 » 5年前 (2021-04-26) 3192浏览 0评论1308个赞
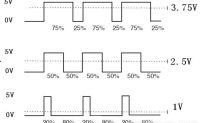
前段时间参加硕士复试,有一道题是pwm是什么,如何产生pwm,录取成功后接下来在这里写一下吧! 1、脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的方法,由于计算机不能输出模拟电压,只能输出0 或5V 的的数字电压值,我们就通过使用高分辨率计数器,利用方波的……继续阅读 » 5年前 (2021-04-26) 2846浏览 0评论806个赞
1、GPS定位 GPS卫星在空中连续发送带有时间和位置信息的无线电信号,供GPS接收机接收。由于传输的距离因素,接收机接收到信号的时刻要比卫星……继续阅读 » 5年前 (2021-04-26) 3292浏览 0评论881个赞