文章目录
- 运动学模型
- 小车坐标系下运动模型分析
- 小车坐标系与世界坐标系转换
- 小车坐标系转换到世界坐标系
- 世界坐标系转换到小车坐标系
- 小车运动与电机转动对应关系
- 完整代码
运动学模型
三轮全向轮小车结构示意图如图所示:
 图中V1,V2和V3也分别称为V_left,V_back和V_right,对应三个轮子的转速,转动的正方向如图所示。
图中V1,V2和V3也分别称为V_left,V_back和V_right,对应三个轮子的转速,转动的正方向如图所示。
小车坐标系下运动模型分析
 对应C语言代码如下:
对应C语言代码如下:
bool forwardMobile(smart_car::KinematicsForward::Request &request, smart_car::KinematicsForward::Response &response) {
response.output.x = ((2.0L * request.input.v_back) - request.input.v_left - request.input.v_right) / 3.0L;
response.output.y = ((sqrt3 * request.input.v_right) - (sqrt3 * request.input.v_left)) / 3.0L;
response.output.theta = (request.input.v_left + request.input.v_back + request.input.v_right) / L3;
return true;
}
小车坐标系与世界坐标系转换
小车坐标系转换到世界坐标系
小车坐标系转换到世界坐标系的公式如下:  对应c语言代码如下:
对应c语言代码如下:
void mobileToWorldCore(double Vxm, double Vym, double& Vxw, double& Vyw) {
Vxw = (std::cos(theta) * Vxm) - (std::sin(theta) * Vym);
Vyw = (std::sin(theta) * Vxm) + (std::cos(theta) * Vym);
}
世界坐标系转换到小车坐标系
同理,小车坐标系转换到小车坐标系的公式如下:  对应c语言代码如下:
对应c语言代码如下:
void worldToMobileCore(double Vxw, double Vyw, double& Vxm, double& Vym) {
Vxm = (std::cos(theta) * Vxw) + (std::sin(theta) * Vyw);
Vym = - (std::sin(theta) * Vxw) + (std::cos(theta) * Vyw);
}
小车运动与电机转动对应关系
 对应C语言代码为:
对应C语言代码为:
bool inverseMobile(smart_car::KinematicsInverse::Request &request, smart_car::KinematicsInverse::Response &response) {
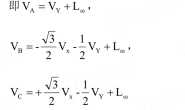
long double V__m_x2 = - request.input.x / 2.0L;
long double sqrt3V__m_y2 = (sqrt3 * request.input.y) / 2.0L;
long double Lomega_p = L * request.input.theta;
response.output.v_left = V__m_x2 - sqrt3V__m_y2 + Lomega_p;
response.output.v_back = request.input.x + Lomega_p;
response.output.v_right = V__m_x2 + sqrt3V__m_y2 + Lomega_p;
return true;
完整代码
#include <cmath>
#include <string>
#include <ros/ros.h>
#include <geometry_msgs/Pose2D.h>
#include <sensor_msgs/JointState.h>
#include <smart_car/FrameToFrame.h>
#include <smart_car/KinematicsForward.h>
#include <smart_car/KinematicsInverse.h>
#include <kdl/frames.hpp>
#include <kdl_parser/kdl_parser.hpp>
long double L;
long double L3;
long double sqrt3;
long double theta = 0;
void mobileToWorldCore(double Vxm, double Vym, double& Vxw, double& Vyw) {
Vxw = (std::cos(theta) * Vxm) - (std::sin(theta) * Vym);
Vyw = (std::sin(theta) * Vxm) + (std::cos(theta) * Vym);
}
bool mobileToWorld(smart_car::FrameToFrame::Request &request, smart_car::FrameToFrame::Response &response) {
mobileToWorldCore(request.input.x, request.input.y, response.output.x, response.output.y);
}
void worldToMobileCore(double Vxw, double Vyw, double& Vxm, double& Vym) {
Vxm = (std::cos(theta) * Vxw) + (std::sin(theta) * Vyw);
Vym = - (std::sin(theta) * Vxw) + (std::cos(theta) * Vyw);
}
bool worldToMobile(smart_car::FrameToFrame::Request &request, smart_car::FrameToFrame::Response &response) {
worldToMobileCore(request.input.x, request.input.y, response.output.x, response.output.y);
}
bool forwardMobile(smart_car::KinematicsForward::Request &request, smart_car::KinematicsForward::Response &response) {
response.output.x = ((2.0L * request.input.v_back) - request.input.v_left - request.input.v_right) / 3.0L;
response.output.y = ((sqrt3 * request.input.v_right) - (sqrt3 * request.input.v_left)) / 3.0L;
response.output.theta = (request.input.v_left + request.input.v_back + request.input.v_right) / L3;
return true;
}
bool forwardWorld(smart_car::KinematicsForward::Request &request, smart_car::KinematicsForward::Response &response) {
forwardMobile(request, response);
mobileToWorldCore(response.output.x, response.output.y, response.output.x, response.output.y);
return true;
}
bool inverseMobile(smart_car::KinematicsInverse::Request &request, smart_car::KinematicsInverse::Response &response) {
long double V__m_x2 = - request.input.x / 2.0L;
long double sqrt3V__m_y2 = (sqrt3 * request.input.y) / 2.0L;
long double Lomega_p = L * request.input.theta;
response.output.v_left = V__m_x2 - sqrt3V__m_y2 + Lomega_p;
response.output.v_back = request.input.x + Lomega_p;
response.output.v_right = V__m_x2 + sqrt3V__m_y2 + Lomega_p;
return true;
}
bool inverseWorld(smart_car::KinematicsInverse::Request &request, smart_car::KinematicsInverse::Response &response) {
worldToMobileCore(request.input.x, request.input.y, request.input.x, request.input.y);
inverseMobile(request, response);
return true;
}
void onPoseWorldMessage(const geometry_msgs::Pose2D::ConstPtr& input){
theta = input->theta;
}
int main(int argc, char **argv){
ros::init(argc, argv, "kinematics");
ros::NodeHandle node;
{
std::string description;
if(!node.getParam("robot_description",description)) {
ROS_ERROR("Could not find '/robot_description'.");
return -1;
}
KDL::Tree tree;
if (!kdl_parser::treeFromString(description, tree)) {
ROS_ERROR("Failed to construct KDL tree.");
return -1;
}
KDL::Chain chain;
if (!tree.getChain("base_link", "rim_back_link", chain)) {
ROS_ERROR("Failed to get chain from KDL tree.");
return -1;
}
KDL::Frame frame = chain.getSegment(0).pose(0);
L = std::sqrt(std::pow(frame.p.x() - 0.0L, 2.0L) + std::pow(frame.p.y() - 0.0L, 2.0L));
node.setParam("parameter/wheel/distance", (double) L);
L3 = 3.0L * L;
sqrt3 = std::sqrt(3.0L);
double parameter;
if (!node.getParam("parameter/initial/theta", parameter)) {
parameter = 0;
}
theta = parameter;
}
ros::ServiceServer forwardMobileService = node.advertiseService("kinematics_forward_mobile", forwardMobile);
ros::ServiceServer forwardWorldService = node.advertiseService("kinematics_forward_world" , forwardWorld );
ros::ServiceServer inverseMobileService = node.advertiseService("kinematics_inverse_mobile", inverseMobile);
ros::ServiceServer inverseWorldService = node.advertiseService("kinematics_inverse_world" , inverseWorld );
ros::ServiceServer mobileToWorldService = node.advertiseService("kinematics_mobile_to_world" , mobileToWorld);
ros::ServiceServer worldToMobileService = node.advertiseService("kinematics_world_to_mobile" , worldToMobile);
ros::Subscriber subscriber = node.subscribe("pose/world", 1, onPoseWorldMessage);
ros::spin();
return 0;
}