当前,水下领域比较小众,开源的资料比较少。Bluerov作为成熟的产品,结合其开源的优势,经历了多年的技术迭代,在市场上受到极大欢迎。刚接触水下领域时,希望能找到一个比较方便的实验平台,开源的Bluerov基本上算是唯一的选择。 Bluerov本身的软件架构,Pix……继续阅读 » 5年前 (2021-04-26) 1550浏览 0评论1806个赞
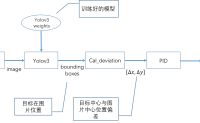
本文主要介绍ROV水下目标跟踪的简易demo软件实现的思路。 一、视觉模块 视觉模块的任务为:通过单目相机识别目标,并计算目标中心位置与图像中心位置的偏差,通过PID控制器得到控制量。demo中得到的控制量可以理解为竖直方向的推力……继续阅读 » 5年前 (2021-04-26) 1772浏览 0评论564个赞
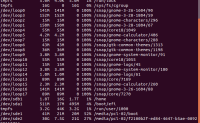
准备工具:需要备份的SD卡,读卡器,PC(Linux) 1、安装必备工具软件: sudo apt-get install dosfstools dump parted kpartx 2、将装载sd卡的读卡器插入PC,查看sd卡使用……继续阅读 » 5年前 (2021-04-26) 2645浏览 0评论1537个赞
做工程时需要在树莓派进行串口通信。具体为接收到某个ROS的topic数据后,向串口下发数据。代码编写有两种方法。 方法一:借助serial库 1、运行环境为ubuntu,首先安装serial库: ……继续阅读 » 5年前 (2021-04-26) 2968浏览 0评论187个赞
Demo测试时需要岸上PC与树莓派在同一局域网下运行,二者能进行通信。下水测试时总的设备连接大致如下图。 ……继续阅读 » 5年前 (2021-04-26) 1975浏览 0评论1240个赞
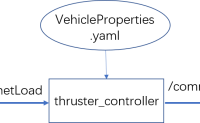
水下平台,如ROV,AUV等的机械结构通常会随着配件的变化而变化。比如,改变推进器的布局,添加重量比较大的传感器等。机械结构的变化反过来会影响运动控制。因此,在设计软件架构时,将机械参数在程序中写死是非常不合理的。根据机械模型设计配置文件,供程序加载是比较理想方案。 ……继续阅读 » 5年前 (2021-04-26) 3406浏览 0评论2440个赞
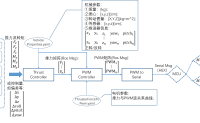
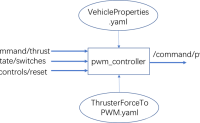
现在开始介绍demo的基础控制模块程序。基础控制模块包含推力分配模块、PWM波计算模块,数据串口下发模块。每个模块的主要功能可以回头看软件框架简介的那一篇文章,在此不做介绍,后续主要介绍的是程序中的一些关键点。 本文主要介绍的推力分配模块的几个关键函数。对应程序中的……继续阅读 » 5年前 (2021-04-26) 3147浏览 0评论2264个赞
这部分内容相当简单,基本上读懂推进器电机模型文件就很容易能读懂程序。可以查阅之前撰写的关于电机模型文件的文章(链接)。程序对应c……继续阅读 » 5年前 (2021-04-26) 3415浏览 0评论2032个赞
本文介绍手柄控制模块的代码。模块对应cabin_teleop。结合前几篇关于基础运动模块代码的解析,显然我们只需要操控手柄发布力和力矩的信息[Fx,Fy,Fz,Mx,My,Mz]即可实现对机器人的控制。如发布[10,0,0,0,0,0]即表示对机器人施加x轴方向10N的力,机器人……继续阅读 » 5年前 (2021-04-26) 2358浏览 0评论1327个赞
模块对应cabin_controllers/serial_to_mcu。模块实现的功能为监听网络中PWM矩阵信息,将其转换成十六进制数据通过串口下发至MCU,实现对推进器电机的控制。模块数据的串口通信借助了ros的serial工具包(sudo apt-get install ro……继续阅读 » 5年前 (2021-04-26) 2181浏览 0评论680个赞
在目标跟踪时,摄像头提供实时的图片信息,我们需要识别出图片目标,且输出目标在图片中的位置,为后续的控制提供条件。在demo中,我是借助darknet_ros实现这一目标。当然,这一模块可以替换成性能更优秀的识别算法。 darknet_ros为yolov3在ros下的……继续阅读 » 5年前 (2021-04-26) 2897浏览 0评论607个赞
在目标跟踪时,摄像头提供实时的图片信息,我们需要识别出图片目标,且输出目标在图片中的位置,为后续的控制提供条件。在demo中,我是借助darknet_ros实现这一目标。当然,这一模块可以替换成性能更优秀的识别算法。 darknet_ros为yolov3在ros下的……继续阅读 » 5年前 (2021-04-26) 2935浏览 0评论2867个赞
……继续阅读 » 5年前 (2021-04-26) 2477浏览 0评论2665个赞
模块十分简单,可以介绍的内容很少。包括两个部分:计算目标物中心距图片中心的偏差,对应cabin_vision/object_deviation;PID跟踪控制,对应cabin_behaviors/pid_tracking。 一、偏差计算 输入输出: ……继续阅读 » 5年前 (2021-04-26) 3274浏览 0评论1077个赞