模块十分简单,可以介绍的内容很少。包括两个部分:计算目标物中心距图片中心的偏差,对应cabin_vision/object_deviation;PID跟踪控制,对应cabin_behaviors/pid_tracking。 一、偏差计算 输入输出:
--目标跟踪模块") 监听topic:/darknet_ros/bounding_boxes,格式darknet_ros_msgs::BoundingBoxes,目标框图顶点在图片中像素点的位置; 发布topic:/cabin_vision/deviation,格式geometry_msgs::PointStamped,目标中心像素点与图片中心像素点偏差。 直接看代码吧,object_deviation.cpp。这部分我写了个python版本的object_deviation.py,有兴趣的话可以看看。 首先是读取设定的摄像头分辨率。
监听topic:/darknet_ros/bounding_boxes,格式darknet_ros_msgs::BoundingBoxes,目标框图顶点在图片中像素点的位置; 发布topic:/cabin_vision/deviation,格式geometry_msgs::PointStamped,目标中心像素点与图片中心像素点偏差。 直接看代码吧,object_deviation.cpp。这部分我写了个python版本的object_deviation.py,有兴趣的话可以看看。 首先是读取设定的摄像头分辨率。
//Load the width and heigth of the camera image
string properties_file;
nh.param("properties_file", properties_file, std::string(""));
if(properties_file.size() != 0){
if(access(properties_file.c_str(),F_OK) == -1){
std::cout<<""<<std::endl;
std::cout<<RED<<"\""<<properties_file<<"\""<<" does not exist!!!!"<<std::endl;
std::cout<<""<<std::endl;
ros::shutdown();
}
else{
YAML::Node properties;
properties = YAML::LoadFile(properties_file);
image_width = properties["image_width"].as<int>();
image_height = properties["image_height"].as<int>();
}
}再者为收到一个目标数据后,计算偏差。
void ObjectDeviation::BoundingBoxSub(const darknet_ros_msgs::BoundingBoxes msg){
deviation_msg.header.stamp = ros::Time::now();
deviation_msg.point.x = (msg.bounding_boxes[0].xmin + msg.bounding_boxes[0].xmax) / 2.0 - image_width / 2.0;
deviation_msg.point.y = (msg.bounding_boxes[0].ymin + msg.bounding_boxes[0].ymax) / 2.0 - image_height / 2.0;
deviation_pub.publish(deviation_msg);
}
二、PID跟踪控制 输入输出:
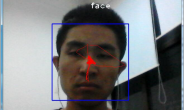
--目标跟踪模块") 监听topic:/cabin_vision/deviation,格式geometry_msgs::PointStamped,目标中心像素点与图片中心像素点偏差。 发布topic:/command/netLoad,格式cabin_msgs::netLoad,作用于机器人上的力及转矩,直接作为基础运动模块的输入; 直接看代码cabin_behaviors/pid_tracking.cpp。对于偏差的处理,如下图:
监听topic:/cabin_vision/deviation,格式geometry_msgs::PointStamped,目标中心像素点与图片中心像素点偏差。 发布topic:/command/netLoad,格式cabin_msgs::netLoad,作用于机器人上的力及转矩,直接作为基础运动模块的输入; 直接看代码cabin_behaviors/pid_tracking.cpp。对于偏差的处理,如下图:
--目标跟踪模块") 设定了一个区域,当机器人中心位于该区域时,即偏差量小于safe_area_x或safe_area_y时,PID控制器在相应方向输出的控制量为0。PID控制器随手写了一个简易的,对应代码:
设定了一个区域,当机器人中心位于该区域时,即偏差量小于safe_area_x或safe_area_y时,PID控制器在相应方向输出的控制量为0。PID控制器随手写了一个简易的,对应代码:
double PIDTracking::PIDController(double err, double pid_p, double pid_i, double pid_d, double last_err, double *integral, double safe_area){
double u = 0.0;
//double t = *integral;
if(abs(err) > safe_area){
*integral += err;
//t += err;
//u = pid_p * err + pid_i * t + pid_d * (err - last_err);
u = pid_p * err + pid_i * (*integral) + pid_d * (err - last_err);
last_err = err;
//*integral = t;
}
return u;
}
剩下的是ros下借助rqt动态调参工具的配置,包括pid参数,安全区域大小,跟踪模式开关:
//Callback for dynamic reconfigure
void PIDTracking::DynamicReconfigCallback(cabin_behaviors::PIDTrackingConfig &config, uint32_t levels){
pid_p_mz = config.pid_p_mz;
pid_i_mz = config.pid_i_mz;
pid_d_mz = config.pid_d_mz;
pid_p_z = config.pid_p_z;
pid_i_z = config.pid_i_z;
pid_d_z = config.pid_d_z;
safe_area_x = config.safe_area_x;
safe_area_y = config.safe_area_y;
tracking_switch = config.tracking_switch;
}
实际在调试时没有太追求效果,只用了比例控制,即将积分i和微分d的参数都设为0。 自此,整个demo软件框架所有模块基本都介绍完毕。