基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
从高斯分布到信息矩阵
某个状态 ,以及一次与该状态相关的观测
。由于噪声的存在,观测服从
的概率分布,可以直观理解为:在状态
下,呈现观测
的概率,当此概率越大说明该观测越准确。多次观测时,假设各个观测之间相互独立,则多个测量
构成的似然概率为:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
如果知道机器人状态的先验信息 ,如 GPS,车轮码盘信息等,则根据贝叶斯法则,可以求得后验概率:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
通过最大后验概率估计,获得系统状态的最优估计:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
在之前我写的卡尔曼滤波中公式部分同样使用了最大后验概率估计。在本问题中,在系统状态 有噪声的观测
表示成概率分布的形式;在已知状态的先验信息,可能是其他传感器得到的信息,现在想融合相机信息,使用 Bayes 法则,求出后验概率
。 后验公式(2)状态量与分母无关,最大后验变成:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
即对等式右侧取对数 ,根据对数的性质拆开,求其负值的最小值。这里取对数的原因也很简单,高斯分布中有
(高斯分布高维形式:
),舍去系数、负负为正也就有了(7)式的形式:
![]()
假设观测值服从多元高斯分布:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
故有:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
此最小二乘的求解可以使用增量方程:(下式应该很好理解, 是系统状态量的增量,类比于经典方程的
;
是信息矩阵,也是协方差的逆)
![]()
多元高斯分布
多元高斯分布(The Multivariate normal distribution)基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补") 零均值的多元高斯分布:
零均值的多元高斯分布: ,
是协方差矩阵,协方差矩阵的逆记作
。三维变量的协方差矩阵为:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
若变量间相互独立,那么除主对角线以外元素都为 0。在上讲中用连续时间下的狄拉克函数 描述相互独立的关系。(9)式中用
为对应元素求期望。
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
Examples[1]
Example 1
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
根据此描述,写出协方差矩阵:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
其中:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
此外 ,
,下面计算非对角元素:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
公式可以通过方差的性质直接写出: 。 上述这部分在论文中是这样书写的:(K就是
协方差)
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
随后计算该协方差矩阵的逆:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
推导应该是很容易理解的, ,且
是
的条件。然后就有个上面的式子,再经通分后写成矩阵形式就有了
的形式,式中的
就是协方差矩阵的逆,也称作信息矩阵。可以注意到,它的
位置是0,表示
关于
条件独立。 若室内外温度正相关
(
表示在
发生的前提下,元素
正相关。
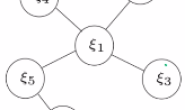
Example 2
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
图中可见是两个变量控制一个变量,比如三角化,用两个相机 pose 计算特征三维坐标的深度:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
论文中是这样↓的:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
但是论文对逆矩阵 的推导中有一个小的错误就是提取出
后,位于矩阵
两个位置的分母并没有将 2 提出来,其他的没有问题,可以自己简单推一下。
- 虽然
不相关,但是他们的信息矩阵对应元素
并不为 0。
- 而当
在另一变量发生的前提下,成负相关。本例中从公式
就可以看出,当
确定时,
越大,
越小。
从 Example 1 去除变量
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
由于公式是这样的:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
和
的取值都与
无关,故可以直接在协方差矩阵上把有关于
的全部删去:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
矩阵对称的不要忘记!这样就变成了一个 的矩阵。对于信息矩阵:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
则是删去与 相关的所有项,在矩阵中就是紫蓝色表示的。可是实际情况下并不会把变量的项用颜色在矩阵中分类,所以引入 Sochur 和 边缘化。
舒尔补应用:边际概率,条件概率
舒尔补[2]定义
给定任意的分块矩阵 ,如下所示:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
- 如果,矩阵块
是可逆的,则
称之为
的舒尔补。
- 如果,矩阵块
是可逆的,则
称之为
Schur complement
是不是很熟悉,在十四讲第二版的第 248-251 页,求解稀疏矩阵时就用到了舒尔补进行边缘化,将观测点 marginalize 使得改进了原先使用的 EKF 方法,使得 BA 能够实时计算。
如何得到舒尔补的形式
将 矩阵变成上三角或者下三角形过程中,就会得到舒尔补:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
其中: 。联合起来,将
变成对角矩阵:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
反过来还能恢复成矩阵 :
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
舒尔补应用于多元高斯分布
设多元变量 服从高斯分布,且由两部分组成:
,变量构成的协方差矩阵:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
其中 概率分布为:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
是边际概率,
是条件概率。 从上式可知:
。即边际概率的协方差直接取矩阵块就成,条件概率的协方差是
对应的舒尔补。 从上式(23)可以得到信息矩阵
:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
可以总结出 的信息矩阵:
- 条件概率
的信息矩阵为:
。
- 边际概率
的信息矩阵为:
。
是边际概率的信息矩阵,
是联合信息矩阵的部分矩阵块。
用求得的结论验证 example 1 的边缘化形式:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
从联合分布 中边缘化掉变量
,即
对应的信息矩阵为:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
与删去颜色得到的完全一致! 总结部分我直接截了贺博课件的图如下:
基于滑动窗口算法的 VIO 系统:可观性和一致性(上)舒尔补")
参考
- ^David Mackay. “The humble Gaussian distribution”. In: (2006) https://people.montefiore.uliege.be/geurts/Cours/AML/Readings/humble.pdf
- ^Schur Complement https://en.wikipedia.org/wiki/Schur_complement