文章目录
- 1. Link元素结构
- 2. link详细属性解析
- 3. joint元素结构
- 4. Joint详细属性解析
- 5. SmartCar——urdf
- 参考文献
1. Link元素结构
link元素描述了具有惯性,视觉特征和碰撞特性的刚体。简单的link文件如下所示
<link name="my_link">
<inertial>
<origin xyz="0 0 0.5" rpy="0 0 0"/>
<mass value="1"/>
<inertia ixx="100" ixy="0" ixz="0" iyy="100" iyz="0" izz="100" />
</inertial>
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="1 1 1" />
</geometry>
<material name="Cyan">
<color rgba="0 1.0 1.0 1.0"/>
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder radius="1" length="0.5"/>
</geometry>
</collision>
</link>
上述代码对应的结构图如下,在其中定义了惯性、视觉、碰撞特性,通常一个joint连接两个link。
详细教程——urdf文件详解")
2. link详细属性解析
- name (必选) link自己的名字,自己任意指定,在这里名字为
my_link。 - inertial(可选元素)
- origin(可选:如果未指定,则默认为identity) 这是惯性参考系相对于链路参考系的姿态。惯性参考系的原点需要位于重心处。惯性参考系的轴不需要与惯性的主轴对齐。 xyz(可选:默认为零向量) 表示 x xx,y yy,z zz 偏移量。 rpy(可选:如果未指定,则默认为identity) 表示以弧度表示的固定轴滚动,俯仰和偏航角度。
- mass 链接的质量由此元素的value属性表示
- inertia 3×3转动惯量矩阵,以惯性框架表示。因为转动惯量矩阵是对称的,所以这里使用属性ixx,ixy,ixz,iyy,iyz,izz仅指定该矩阵的6个以上对角线元素。
- visual (可选元素) link的可视属性。此元素指定对象的形状(例如:立方体(box),圆柱(cylinder)等)以用于可视化目的。注意:同一链接可以存在多个visual标记实例。个人感觉该属性是必选属性,要想在仿真软件里看到该模型,就必须设置该属性。
- name 指定链接几何的一部分的名称。不常用属性。
- origin (optional: defaults to identity if not specified) The reference frame of the visual element with respect to the reference frame of the link. xyz(可选:默认为零向量) 表示x xx,y yy,z zz偏移量。 rpy(可选:如果未指定,则默认为identity) 表示以弧度表示的固定轴滚动,俯仰和偏航角度。
- geometry (必选)视觉对象的形状。这可以是以下之一:
- box (立方体) size属性包含框的三个边长。立方体的原点在它的中心。
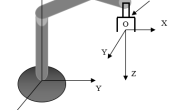
- cylinder (圆柱) 指定半径和长度。圆柱的原点位于其中心,原点如图所示,其他立方体的原点类似。
- sphere (球) 指定半径。球体的原点位于其中心。
- mesh 当想添加更为复杂的模型时,可以通过
.stl等mesh文件导入模型。
详细教程——urdf文件详解")
- material(可选) 视觉元素的材料。允许在顶层’robot’元素中指定’link’对象之外的材质元素。然后,您可以在链接元素中按名称引用材料。
- name 材料的名称
- color(可选) rgba由四个数字组成的材料颜色,表示红色/绿色/蓝色/ alpha,每个数字的范围为[0,1]。alpha即色彩空间,也就是透明度/不透明度。
- texture(可选) 材质的纹理由文件名指定。
- collision(可选)链接的碰撞属性。请注意,这可能与链接的可视属性不同,例如,通常使用更简单的碰撞模型来减少计算时间。注意:同一链接可以存在多个collision标记实例。它们定义的几何的联合形成了链接的碰撞表示。该属性主要是在模拟时模型会与其他模型发生碰撞,不设置该属性的话会出现两个模型相互穿过的情况,设置该属性后在geometry设定的形状内两个模型会发生碰撞。
- name(可选) 指定链接几何的一部分的名称。这对于能够引用链接几何的特定位是有用的。
- origin(可选:如果未指定,则默认为identity) 碰撞元素的参考系相对于链接的参考系。 xyz(可选:默认为零向量) 表示x xx,y yy,z zz偏移量。 rpy(可选:如果未指定,则默认为identity) 表示以弧度表示的固定轴滚动,俯仰和偏航角度。
- geometry 请参阅上述可视元素中的几何描述。
3. joint元素结构
joint元素描述了机器人关节的运动学和动力学,并且指定了关节的安全限制。 下面是一个使用joint元素的例子:
<joint name="my_joint" type="floating">
<origin xyz="0 0 1" rpy="0 0 3.1416"/>
<parent link="link1"/>
<child link="link2"/>
<calibration rising="0.0"/>
<dynamics damping="0.0" friction="0.0"/>
<limit effort="30" velocity="1.0" lower="-2.2" upper="0.7" />
<safety_controller k_velocity="10" k_position="15" soft_lower_limit="-2.0" soft_upper_limit="0.5" />
</joint>
上述代码对应的结构图如下,在其中定义了父link、子link以及两者之间的链接状态。
详细教程——urdf文件详解")
4. Joint详细属性解析
joint元素中拥有两个属性:
- name (必选) 指定joint的名字(唯一的)
- type (必选) 指定joint的类型,有下列选项:
- revolute – 可以绕着一个轴旋转的铰链关节,有最大值和最小值限制。
- continuous – 连续型的铰链关节,可以绕一个轴旋转,没有最大值和最小值限制。
- prismatic – 滑动关节,可以沿着一个轴滑动,有最大值和最小值限制。
- fixed – 这不是一个实际的关节,因为它无法运动,所有的自由度都被锁定。这种类型的关节不需要指定轴、动力学特征、标度和最大值最小值限制。
- floating – 这是一个具有6个自由度的关节。
- planar – 此关节在一个平面内运动,垂线是运动轴。
- origin (optional: defaults to identity if not specified) 从parent link到child link的变换,joint位于child link的原点,具体如图所示。
- xyz (optional: defaults to zero vector) 代表x xx,y yy,z zz 轴方向上的偏移,单位米。
- rpy (optional: defaults ‘to zero vector ‘if not specified) 代表绕着固定轴旋转的角度:roll绕着x轴,pitch绕着y轴,yaw绕着z轴,用弧度表示。
- parent (必选) parent link的名字是一个强制的属性,是这个link在机器人结构树中的名字。 可以理解为parent是主题,child是固定在主体上的配件。
- child> (必选) child link的名字是一个强制的属性,是这个link在机器人结构树中的名字。
- axis (可选: defaults to (1,0,0)) joint的axis轴在joint的坐标系中。这是revolute joint旋转的轴,prismatic joint移动的轴,是planar joint的标准平面。这个轴在joint坐标系中被指定。fixed和floating类型的joint不需要用到这个字段。
- xyz (required) 代表轴向量的 x xx,y yy,z zz 分量,这应该是一个标准化的向量。
- calibration (可选) joint的参考点,用来矫正joint的绝对位置。
- rising (可选) 当joint正向运动时,参考点会触发一个上升沿。
- falling (可选) 当joint正向运动时,参考点会触发一个下降沿。
- dynamics (可选) 该元素用来指定joint的物理性能。它的值被用来描述joint的建模性能,尤其是在仿真的时候。
详细教程——urdf文件详解")
- limit (只有 type 为 revolute and prismatic 时必选) 该元素包含以下属性:
- lower (可选, defaults to 0) 指定joint运动范围下界的属性(revolute joint的单位为弧度,prismatic joint的单位为米),连续型的joint忽略该属性。
- upper (可选, defaults to 0) 指定joint运动范围上界的属性(revolute joint的单位为弧度,prismatic joint的单位为米),连续型的joint忽略该属性。
- effort (必选) 该属性指定了joint运行时的最大的力。 (∣ |∣applied effort∣ < ∣ | < |∣<∣effort∣ |∣)。 详见安全限制
- velocity (必选) 该属性指定了joint运行时的最大的速度。 详见安全限制
- mimic (可选) (New with ROS Groovy. See issue) 这个标签用于指定已定义的joint来模仿已存在的joint。这个joint的值可以用以下公式计算 value = multiplier * other_joint_value + offset. 有如下可选的属性: joint (required) 需要模仿的joint的名字。
- multiplier (可选) 指定上述公式中的乘数因子。
- offset (可选) 指定上述公式中的偏移项。默认值为0(revolute joint的单位为弧度,prismatic joint的单位为米)。
- safety_controller (可选) 该元素包含下列属性:
- soft_lower_limit (可选, defaults to 0) 该属性指定了joint安全控制边界的下界,是joint安全控制的起始限制点。这个值需要大于上述的limit中的lower值。 更多细节 详见安全限制。
- soft_upper_limit (可选, defaults to 0) 该属性指定了joint安全控制边界的上界,是joint安全控制的起始限制点。这个值需要小于上述的limit中的upper值。 更多细节 详见安全限制。
- k_position (可选, defaults to 0) 本属性用于说明位置和速度之间的关系。 更多细节 详见安全限制。
- k_velocity (必选) 本属性用于说明力和速度之间的关系。 更多细节 详见安全限制。
5. SmartCar——urdf
下载相关文件点击这里 下面对小车的urdf进行详细的介绍。
<?xml version="1.0"?>
<robot name="smartcar">
<link name="base_link"> <!-- 定义最基本的link作为小车的车体,其他link通过jiont固定在该link上 -->
<visual> <!-- 视觉信息 -->
<geometry>
<box size="0.25 .16 .05"/> <!-- 选择0.25cm x 0.16cm x 0.05cm 的立方体作为小车车体 -->
</geometry>
<origin rpy="0 0 1.57075" xyz="0 0 0"/> <!-- 车体绕着z轴旋转90度 -->
<material name="blue">
<color rgba="0 .5 .8 1"/>
</material>
</visual>
</link>
为更直观的看 的作用,在rviz中显示如下图
详细教程——urdf文件详解") 将其改为
将其改为 <origin rpy="0 0 0" xyz="0 0 0"/>后,在rviz中显示如下图
详细教程——urdf文件详解") 明显可以看出图中只有车体绕着z轴转动了90度,轮子等其他部分没有变动。 右前轮的link定义如下,至于为什么右前轮没有
明显可以看出图中只有车体绕着z轴转动了90度,轮子等其他部分没有变动。 右前轮的link定义如下,至于为什么右前轮没有<origin rpy="0 0 1.57075" xyz="0 0 0"/>进行转动,因为在其后的定义的right_front_wheel_joint中将其旋转链接在base_link上。
<link name="right_front_wheel">
<visual>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link>
下面是连接车体和右前轮的joint,名字为right_front_wheel_joint
<joint name="right_front_wheel_joint" type="continuous"> <!-- 类型为continuous,连续型的铰链关节,可以绕一个轴旋转,没有最大值和最小值限制 -->
<axis xyz="0 0 1"/> <!-- 设置z轴为旋转轴 -->
<parent link="base_link"/> <!-- 其父link为base_link,即车体 -->
<child link="right_front_wheel"/> <!-- 子link为右前轮,将其固定在车体上 -->
<origin rpy="0 1.57075 0" xyz="0.08 0.1 -0.03"/> <!-- 由于轮子初始状态为圆柱,像本章第二张图所示,因此需要将其绕着y轴旋转90度 -->
<limit effort="100" velocity="100"/> <!-- 转动时最大力为100,最大速度也为100 -->
<joint_properties damping="0.0" friction="0.0"/> <!-- 设置阻尼值和摩擦力均为0 -->
</joint>
下面为其他轮子的定义,以及与车体的link,不再做详细解释,跟上面的类同。
<link name="right_back_wheel">
<visual>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link>
<joint name="right_back_wheel_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="right_back_wheel"/>
<origin rpy="0 1.57075 0" xyz="0.08 -0.1 -0.03"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint>
<link name="left_front_wheel">
<visual>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link>
<joint name="left_front_wheel_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="left_front_wheel"/>
<origin rpy="0 1.57075 0" xyz="-0.08 0.1 -0.03"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint>
<link name="left_back_wheel">
<visual>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link>
<joint name="left_back_wheel_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="left_back_wheel"/>
<origin rpy="0 1.57075 0" xyz="-0.08 -0.1 -0.03"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint>
<link name="head">
<visual>
<geometry>
<box size=".02 .03 .03"/>
</geometry>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
</visual>
</link>
<joint name="tobox" type="fixed">
<parent link="base_link"/>
<child link="head"/>
<origin xyz="0 0.08 0.025"/>
</joint>
</robot>