此文档作为自己学习过程中一个记录复习,基本来源于《Robotics, Vision & Control》这本书,可以作为matlab机器人工具箱的说明书来用,有兴趣可移步自行下载相关文档 ……继续阅读 » 5年前 (2021-04-26) 3033浏览 0评论2890个赞
理论基础(D-H) 此处理论基础取自《机器人导论》采用改进的Modifird DH参数模型 R代表转动副,P代表移动副 有N个关节(编号从1到N)机械臂具有N+1个连杆(编号从0到N)连杆0是机械臂基座,连杆N固连末端执行器或者工具,关节i将连杆……继续阅读 » 5年前 (2021-04-26) 2530浏览 0评论840个赞
机器人工具箱中的SerialLink 类中有现成的函数: SerialLink.fkine(theta),可以直接对已经建立的机器人模型做运动学分析 SerialLink.ikine(T) 可以求逆运动学参数。 ……继续阅读 » 5年前 (2021-04-26) 2451浏览 0评论1143个赞
正动力学: 已知各个关节上电机提供的力/力矩,在此力矩作用下,关节如何运动,求对应各个关节角度、角速度、角加速度。 逆动力学: 已知一个轨迹点,以及关节速度、加速度、角加速度求出期望的关节力矩 机器人动力学参数查看: ……继续阅读 » 5年前 (2021-04-26) 1910浏览 0评论248个赞
学习过程中涉及欧拉角和旋转矩阵的转换,索性整理学习一下欧拉角四元数和旋转矩阵的概念以及matlab中的互相转换 本文摘自各大课本,博客,自己学习整理使用,侵删 MATLAB矩阵乘法从左到右依次相乘 用R表示旋转矩阵。 yaw(偏航) pitch(俯仰) roll(横滚)分别表示Z……继续阅读 » 5年前 (2021-04-26) 2305浏览 0评论2573个赞
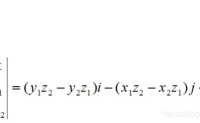
基础知识 速度矢量,角速度矢量,叉乘运算 速度是描述质点运动快慢和方向的物理量,等于位移对时间的微分。同时也等于加速度对时间的积分。 角速度: 定义:一……继续阅读 » 5年前 (2021-04-26) 3470浏览 0评论1448个赞
S函数是simulink动态系统的核心,可以采用m代码,C,C++等语言编写S函数,由一种特定的语法构成,用来描述并实现连续系统,离散系统以及复合系统等动态系统。S函数可以接收来自simulink求解器的相关信息,并对求解器发出的命令做出适当的响应 基础知……继续阅读 » 5年前 (2021-04-26) 2588浏览 0评论245个赞
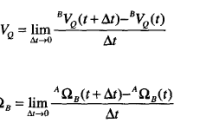
刚体加速度 分析刚体加速度时,在任一顺势瞬时,对刚体的线速度和角速度进行求导,可以分别得到线加速度和 角加速度……继续阅读 » 5年前 (2021-04-26) 2428浏览 0评论2635个赞
Sympybotics Sympybotic是一款使用python语言利用Sympy和Numpy包的开源机器人运动学和动力学的符号推导工具包,在机器人动力学参数辨识中可以用来建立机器人动力学模型,根据所建模型推导动力学最小惯性参数集和观测矩阵,并可……继续阅读 » 5年前 (2021-04-26) 3370浏览 0评论1243个赞