主要知识点: 1.src、build、devel、install各文件夹的功能介绍。 2.创建工作空间(创建文件夹,初始化工作空间)、编译工作空间、设置环境变量,检查环境变量 (echo $ROS_PACKAGE_PATH) 3.创建功能包:cat……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3197浏览 0评论1080个赞
本专栏主要介绍如果通过OpenCv-Python进行图像处理,通过原理理解OpenCv-Python的函数处理原型,在具体情况中,针对不同的图像进行不同等级的、不同方法的处理,以达到对图像进行去噪、锐化等一系列的操作。同时,希望观看本专栏的小伙伴可以理解到OpenCv进行图像处理……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2991浏览 0评论1834个赞
2016年10月5日,谷歌宣布开放一个名为cartographer的即时定位与地图建模库,开发人员可以使用该库实现机器人在二维或三维条件下的定位及建图功能。cartograhper的设计目的是在计算资源有限的情况下,实时获取相对较高精度的2D地图。考虑到基于模拟策略的粒子滤波方法……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2141浏览 0评论1915个赞
话题模型 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3465浏览 0评论717个赞
从正面观看我们的四足机器人时,可以简化成以下几何图形,接下来我们就根据该模型来分析四足机器人的滚转角调节 一、几何模型 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1841浏览 0评论720个赞
视觉抓取中非常重要的一个部分就是对抓取物体的识别,无论是二维图像还是三维点云,在ROS中都可以找到对应的功能包,https://blog.c……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2450浏览 0评论2407个赞
写在前面 上一小节我们介绍了机器人的舵机驱动与串口通讯的原理。到目前为止,我们已经完成了: 机器人编码器和轮胎的驱动机器人头部舵机的驱动< ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1665浏览 0评论2767个赞
1.首先 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2933浏览 0评论1218个赞
开头 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3496浏览 0评论557个赞
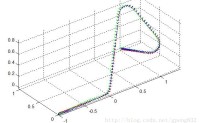
ROS-moveit!探索(4)webots和m……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2908浏览 0评论732个赞
ROS-moveit!探索(3)webots和movei……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2984浏览 0评论597个赞
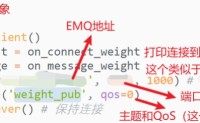
这个是我用来看EMQ服务器里面数据的工具,MQTTX,挺好……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1947浏览 0评论717个赞
一、前言 “纸上得来终觉浅,绝知此事要躬行”。ROS真的有一定难度,只让它“跑”起来就得记很多的指令,看很多的文档,更别说研究它了。这个测试很早……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3586浏览 0评论763个赞
写在前面 2020年电赛结束了,因为疫情的原因,今年的电赛也推迟了,所以我先参加了智能车竞赛再参加的电子设计竞赛。准备时间不是很充分,就准备了一个国庆的时间,因此我们准备的小车就是智能车的舵机和电机,为了符合比赛要求,底板是我们重新打的,然后……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3032浏览 0评论1216个赞
首先 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3319浏览 0评论839个赞
首先 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3313浏览 0评论747个赞
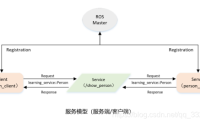
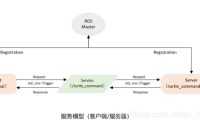
在ROS Master的管理之下有client和server两个节点,下面要实现的是server端,server端用来给海龟发送速度的指令,通过topic来发,service功能是以client端发布request控制server是不是要给海龟发速度指令,client端是海龟运动……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3279浏览 0评论2672个赞
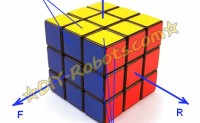
前言: 今年很荣幸的参加了首届高等教育创意机器人大赛的主题二,机械手解魔方这个项目,此次比赛可以说收获颇丰。见识到了其他高校的机械手系统,可以说是仰慕不已,当然了绝大多数,还是比较传统的,在此只讨论视觉采集的方案,随后介绍我们的视觉方案。 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2263浏览 0评论2312个赞
引言 进行图像的分割的方式有很多种,这里我们主要要介绍的是一种叫做分水岭(Watershed)的算法。 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2824浏览 0评论758个赞
1.话题编程 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3485浏览 0评论1625个赞
在建立好自己的机器人模型后, 我们可以利用turtlebot的ROS库,实现自己机器人的自主导航. ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2936浏览 0评论1000个赞
目录: 一、IMDb电影评论数据预处理 二、词袋模型应用 三、文本数据清洗 四、模型训练:逻辑回归 五、核外学习:大规模数据应用 六、潜在狄氏分配(LDA)主题建模 首先祝各位读者朋友新春快乐,牛年大吉,学习工作顺利!……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2948浏览 0评论2070个赞
好久不见朋友们,首先祝大家新年好呀!新的一年,祝大家牛年大吉,万事如意,bug少点,笑容多点!!! ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3160浏览 0评论2480个赞
对于串联机器人来说,求逆解的难度要大于求正解,市面上的工业机器人一般是利用的是利用解析法求封闭解,机器人有封闭解是有条件的—Pieper法则。另一种求逆解的方法是利用迭代法求数值解,适用于不满足Pieper法则的构型,……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2997浏览 0评论927个赞
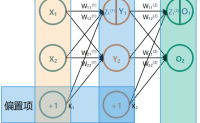
本文有一部分内容参考以下两篇文章: 一文弄懂神经网络中的反向传播法——BackPropagation ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1750浏览 0评论2471个赞
本专栏主要介绍如果通过OpenCv-Python进行图像处理,通过原理理解OpenCv-Python的函数处理原型,在具体情况中,针对不同的图像进行不同等级的、不同方法的处理,以达到对图像进行去噪、锐化等一系列的操作。同时,希望观看本专栏的小伙伴可以理解到OpenCv进行图像处理……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3368浏览 0评论205个赞
从正上方观看我们的四足机器人时,可以简化成以下几何图形,接下来我们就根据该模型来分析四足机器人的偏航调节 一、几何模型 以右前腿为例 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3105浏览 0评论1732个赞
每当我们需要运行一个ROS节点或工具时,都需要打开一个新的终端运行一个命令。当系统中的节点数量不断增加时,“每个节点一个终端”的模式会变得非常麻烦。那么有没有一种方式可以一次性启动所有节点呢?答案当然是肯定的。 这里我引用古月的书上的内容给大家详细介绍一下。 &nb……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2933浏览 0评论618个赞
1.创建功能包 cd /catkin_ws/srccatkin_create_pkg learning_tf roscpp rospy tf t……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3163浏览 0评论2020个赞
上一篇文章:深度学习1—最简单的全连接神经网络 我们完成了一个三层(输入+隐含+输出)且每层都具有两个节点的全连接神经网络的原理分析和代码编写。本篇文章将进一步探讨如何把每层……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1723浏览 0评论416个赞
参考:http://wiki.ros.org/ROS/Tutorials/WritingPublisherSubscriber(python) 1 编写Publisher节点 &……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1783浏览 0评论995个赞
前言: 机械手解魔方的快速方案,基本就是两只手成90度摆……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1956浏览 0评论1314个赞
魔方机器人(基于OpenCV、Arduino) 简介 顾名思义,魔……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2030浏览 0评论1664个赞
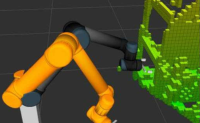
师兄和同门在做SLAM的时候,经常会用到的 octomap ,也就是八叉树地图。octomap相比于点云地图来说大大减小了地图的存储空间。既然octomap可以用于导航和避障,那么自然也可以导入moveit!,作为机械臂路径规划过程中的障碍物,方便机械臂和障碍物之间进行碰撞检测。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3037浏览 0评论1006个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2124浏览 0评论874个赞
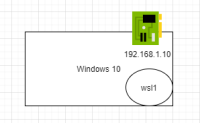
一、 鲁迅说过:“不能一口吃个胖子。” 这句话是有道理的。前段时间测试wsl2安装ROS引导ABB机器人,碰了钉子。今天网上搜了一下wsl的网络配置,发现用wsl要比wsl2简单很多。 WSL1 是共享宿主机的网络栈,即 WSL1 共享主机 IP,并没有自己独立的逻辑网卡,也即没……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3450浏览 0评论600个赞
Launch文件:通过XML文件实现多节点的配置和启动(可自动启动ROS Master) ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1791浏览 0评论1027个赞
ROS当中的关键组件: Launch文件TF坐标变换Qt工具箱Rv……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3562浏览 0评论1689个赞
整体框架 本系统的设计理念共分为三个层……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2539浏览 0评论1093个赞
很多同学会把路径规划(Path Planning)和轨迹规划(Trajectory Planning)这两个概念混淆,路径规划只是表示了机械臂末端在操作空间中的几何信息,比如从工作台的一端(A点)沿直线移动到另一端(B点)。而轨迹规划则加上了时间律,比如它要完成的任务是从A点开始……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3665浏览 0评论2985个赞
本专栏主要介绍如果通过OpenCv-Python进行图像处理,通过原理理解OpenCv-Python的函数处理原型,在具体情况中,针对不同的图像进行不同等级的、不同方法的处理,以达到对图像进行去噪、锐化等一系列的操作。同时,希望观看本专栏的小伙伴可以理解到OpenCv进行图像处理……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2549浏览 0评论1506个赞
Astra pro深度相机配置 我发现从github上clone下来的功能包并没有rviz文件 为了显示深度相机的点云图,这……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1944浏览 0评论1940个赞
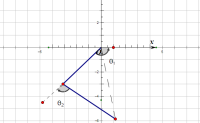
一、平面运动学建模 本篇将会对四足机器人的腿部进行数学建模,求解器正逆运动学解,包含详细公式推导与计算 不考虑横向髋关节运动时,四足机器人的腿部可以简化成二连杆机构 1、几何建模……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2438浏览 0评论1773个赞
launch文件:通过XML文件实现多节点的配置和启动(可自启动ROS Mater) launch文件语法 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2987浏览 0评论2261个赞
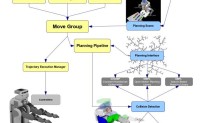
运动规划(Motion Planning):要让一个机器人实现运动规划,需要先将机器人抽象到构形空间(C-Space)。MoveIt就可以帮大家把这些工作给做了,只需提供机器人URDF模型,就可以调用几大运动规划库的规划算法(如OMPL,SBPL……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2434浏览 0评论1681个赞




![[OpenCV]经典霍夫变换原理](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=/Uploads/old-md/uploads/20210207_17802.gif&h=123&w=200&q=90&zc=1&ct=1)
![ROS-moveit!探索(4)webots和moveit联合控制[2]](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=/Uploads/old-md/uploads/20210210_77079.jpg&h=123&w=200&q=90&zc=1&ct=1)


![[OpenCV]时间中值滤波](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=/Uploads/old-md/uploads/20210209_52249.png&h=123&w=200&q=90&zc=1&ct=1)
![[OpenCV]特征对齐](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=/Uploads/old-md/uploads/20210211_96404.png&h=123&w=200&q=90&zc=1&ct=1)
![[OpenCV]Watershed算法进行图形分割](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=/Uploads/old-md/uploads/20210212_78947.jpg&h=123&w=200&q=90&zc=1&ct=1)