这里放了一个小强机器人的bag和我自己的bag包,以供大家测试。 链接:https://pan.baidu.com/s/1GF5FNFIKiRV3wbmBH3HwWQ 提取码:668d 前提: 1.需要三维激光启动节点,发布/points……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2350浏览 0评论903个赞
基于快速扩展随机树(RRT / rapidly exploring random tree)的路径规划算法,通过对状态空间中的采样点进行碰撞检测,避免了对空间的建模,能够有效地解决高维空间和复杂约束的路径规划问题。该方法……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2504浏览 0评论2176个赞
Arduino智能小车系列教程1——智能小车拼……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2820浏览 0评论703个赞
在前述文篇《解构波士顿动力机器人(一)》中简述了BigDog的技术原理,然而“踹不倒”、在复杂地形行走的运动控制却是技术核心。本文将从Little Dog机器人为本体,分析运……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2616浏览 0评论116个赞
URDF(Universal Robot Description Format)——通用机器人描述格式,它是ROS里边使用的一种机器人的描述文件,包含的内容有:连杆、关节,运动学和动力学参数、可视化模型、碰撞检测模型等。 到目前为止,本……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3328浏览 0评论1772个赞
最近由于需求,需要自定义一些topic格式进行数据的处理。基于常见的数据类型:int32 flosat32 bool 等可以定义出需要的消息格式。 如:example.msg ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3039浏览 0评论580个赞
前言: 已入强化学习一个学期了,发现自己急需一个物理环境来进行训练机器人,前前后后参考过过许多环境,但是最后选择了Unity3D,这是因为其足够简单,不用费很大的功夫就可以建立一个简易的机器人,只需要编写C#脚本和tensoflow进行通讯,立马就……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3027浏览 0评论1289个赞
Error: L6406E: No space in execution regions with .ANY selector matching问题描述……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2655浏览 0评论897个赞
搜索区域 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2425浏览 0评论1066个赞
Arduino智能小车系列教程 Arduino智能小车系列教程1——拼装篇Arduino智能小车系列教程2——测试篇……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2236浏览 0评论1535个赞
1. 算法简介 Catmull-Rom Spline算法是一种插值算法,能够在目标点之间插值生成一条平滑的曲线 算法数学原理不在此介绍 算法特点 什么情况下,可以使用Catmull-Rom Spline算法呢——平滑机器人或无人车的路径 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3550浏览 0评论530个赞
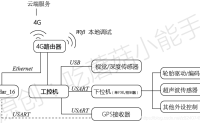
室外低速自动导航车的设计(1)——基础硬件配置 今天我们来开始做基于GPS和16线激光雷达的低速导航车项目。 因为不论做什么车,首先都要把硬件搭建起来,除了基础的机械机构(骨架和壳子)之外,基本的传感器,车轮的驱动器以及工控机都是要有的。 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2514浏览 0评论2704个赞
代码是最为耐心、最能忍耐和最令人愉快的伙伴,在任何艰难困苦的时刻,它都不会抛弃你(开场白) 长时间不写博客,我总感觉自己没有做事情,最近一直在做目标检测,想结合一下双目视觉,做立体检测,于是就研究了一下双目视觉,参考了很多人的相关博客,在这里,特意表示感谢一下。 使用Opencv……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2910浏览 0评论486个赞
Arduino智能小车系列教程4——调速篇 Arduino智能小车系列教程 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1817浏览 0评论680个赞
LOAM-Livox是针对livox-LiDAR的一个激光里程计和建图(LOAM)的功能包 Loam-Livox是一个适用于 Livox LiDAR 强大的、低漂移实时的里程计和建图功能包 Livox LiDAR……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3692浏览 0评论168个赞
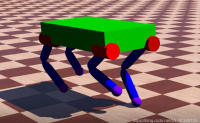
前言: 之前在Unity3D中尝试训练四足机器人学习奔跑前进,只是做了简单的尝试。在19年的寒假里由于要写论文,所以基于强化学习提出一种分层学习算法,实现四足机器人在腿瘸后仍可以继续向前运动。这种是一种比较简单的,所以也就只发表在国内的核心期刊上面。这也是我第……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2719浏览 0评论2489个赞
Arduino智能小车系列教程4——超声波避障 Arduino智能小车系列教程 &nbs……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2997浏览 0评论1214个赞
前言 前段时间说到小编手里有两个传感器,6个激光雷达与摄像头,还有一个微波摄像头,分别装在一个路口的不同地方,需要将这些传感器进行融合输出目标列表。但是要做到融合首先第一步就是标定,做空间同步,第二是时间同步。 接下来我以激光雷达与摄像头为例,其中激光……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2663浏览 0评论1012个赞
写在前面我最近在调试购物车的底盘,底盘上有一个光电传感器,是通过串口……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1746浏览 0评论1032个赞
前言 一个二维的 marker 通常有四个角点,如果把四个角点当做独立的三维特征点去参与BA优化,那么需要十二个参数,并且四个角点之间的约束(边长以及正交)还不好加入优化。这篇博客是将一个marker用6自由度的坐标系进行建模,推导了整个Marke……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2441浏览 0评论2788个赞
室外低速自动导航车的设计(2)——多线激光雷达的点云解析 我们在前面硬件系统的构建中通过网络接收到了多线激光雷达的原始数据,这些数据在空间中形成了一个个的点,每一个点都代表了某个物体表面的回波。我们采用的激光雷达是……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2220浏览 0评论2143个赞
注意:本文下载的tensoflow/model版本比较旧,是18年的版本,现在github上有更新,对代码和文件结构进行了一定的优化,因此下文的流程使用起来可能会与最新版本有所差异,大家要根据官方介绍灵活设置 1 源代码测试……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3081浏览 0评论2595个赞
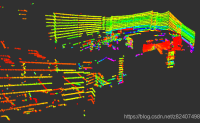
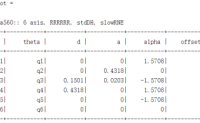
首先,根据不同的雷达,了解雷达发布的点云消息。(IMU也是一样,了解IMU发布的点云topic)。 本文使用的是Robosense 16线激光雷达,暂时未使用IMU(建议6轴,再加上GPS定位精度会高很多)发布PointCloud2类型的消息默认的topic为rslidar_po……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2534浏览 0评论2714个赞
基于ROS-Serial和Arduino实现控制六轴舵机机械臂 &……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3094浏览 0评论452个赞
Hi 小伙伴们,古月居新版本上线啦!本次大幅改版完善了界面的优化,并增加了一些新功能,小编已经迫不及待想和你们分享了~ ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2378浏览 0评论1510个赞
描述 使用贝塞尔曲线生成路径 已知:若干个二维路径点(x, y),生成一段由一系列(x, y)点组成的点集 公式 网上有很多贝塞尔曲线的概念和知识,这里不做赘述 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2910浏览 0评论1531个赞
参考:ros::NodeHandle::advertiseServ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3264浏览 0评论467个赞
上一篇文章我们强力推导了GAN的数学公式,它就是: ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1755浏览 0评论2640个赞
0x00 What’s STDR Simulator? ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3296浏览 0评论849个赞
Arduino智能小车系列教程5——蓝牙小车 Arduino智能小车系列教程 < ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2713浏览 0评论2501个赞
检测或者训练有问题的可发邮件咨询小编,小编尽力解答1039463596@qq.com 好吧,正式开始跑程序(其实官网都有) 这篇文章是训练YOLO v2过程中的经验总结,我使用YOLO v2训练一组自己的数据,训练后的model,在阈值为.25的情况下,Recall值是95.54……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2188浏览 0评论900个赞
大概流程走完,其实还是有点懵逼的,下面就官方文档,讨论下细节,要是我自己没注意到的点。 Validate your bag 如果是准备跑自己的或者别人的bag包,这一步是很有必要的,可以从中获得相关消息的topic和frame_id,这个在填写lua文……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2001浏览 0评论2413个赞
Arduino智能小车系列教程6——循迹小车 Arduino智能小车系列教程 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3206浏览 0评论2620个赞
前言 上一篇文章 “多机器人协同控制①——仿真……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2049浏览 0评论738个赞
目录 一、VIO(Visual-Inertial Odometry)概述……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2648浏览 0评论282个赞
写在前面 上一节我们简单讨论了在生成点云的过程中的矩阵变换。如果大家看本章有点懵逼的话,不妨先看一下我上节写的内容。 我们本节将基于激光雷达与矩阵变换关系,将激光雷达的LaserScan数据转……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2587浏览 0评论167个赞
Arduino智能小车系列教程7——小车测速 Arduino智能小车系列教程 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1555浏览 0评论1284个赞
webots版本:2021aros版本:noetic……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2004浏览 0评论2192个赞
1. 引言 1.……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2034浏览 0评论2725个赞
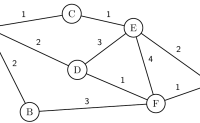
一. 轨迹规划是什么? 在机器人导航过程中,如何控制机器人从A点移动到B点,通常称之为运动规划。运动规划一般又分为两步: 1、路径规划:在地图(栅格地图、四\八叉树、RRT地图等)中搜索一条从A点到B点的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3492浏览 0评论1331个赞
在上一篇文章中,我们得到的轨迹并不是很好,与路径差别有点大,我们期望规划出的轨迹跟路径大致重合,而且不希望有打结的现象,而且希望轨迹中的速度和加速度不超过最大限幅值。为了解决这些问题有两种思路: 思路一:把这些”期望“加入到优化问题中。 思路二:调整时间分配,来避免……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2928浏览 0评论483个赞
前几日有学弟问我,ros如何跟下位机通信呢? ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2718浏览 0评论2653个赞
汇总 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3660浏览 0评论1022个赞
汇总 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2891浏览 0评论2851个赞
在自动驾驶领域,激光里程计和建图(LOAM)已经起到重要的作用,归因于它可以在定位机器人的位姿的同时建立周围环境的高精度、高分辨率的地图。 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1953浏览 0评论1335个赞