(《视觉SLAM十四讲》第三讲习题7)设有小萝卜一号和二号在世界坐标系中。一号位姿q1 = [0.35, 0.2, 0.3, 0.1],t1=[0.3, 0.1, 0.1]。二号位姿q2=[-0.5, 0.4, -0.1, 0.2], t2=[……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3439浏览 0评论2069个赞
local costmap empty using move_base_node|turtlebot_stage在我运行roslaunch turtlebot_stage turtlebot_in_stage.la……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3325浏览 0评论216个赞
描述ROS系统下,使用moveit和gazebo搭建UR机械臂控制的仿真环境,并使用C++编写一个节点来控制UR机械臂的移动ROS系统:kineticUR5机械臂电脑系统:Ubuntu16.04截……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2830浏览 0评论2523个赞
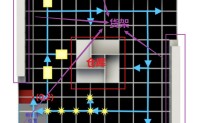
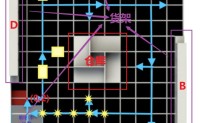
文章目录A 路径规划定义B 构型/位型空间(configuration Space)C 障碍物与构型空间C 环境模型建立D 欧氏距离与曼哈顿……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3388浏览 0评论2349个赞
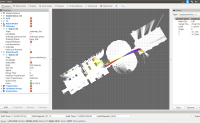
*转载请注明出处 @梦凝小筑1.1 Cartographer 整体结构……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2370浏览 0评论481个赞
@[toc]1.……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1978浏览 0评论1446个赞
Qt QTreeWidget新建一个Qt Widgets Application,拖拽一个Tree Widget 到 ui 界面上,最后实现的效果如下:……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2503浏览 0评论2780个赞
描述机械臂末端的位姿是p时,不想沿着基坐标系来移动,而是想沿着末端的xyz轴来移动接口代码核心函数# 移动def move_……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3280浏览 0评论1473个赞
NVIDIA Jetson TX2 编译并启动ttyACM模块平台: TX2 L4T 27.1系统:ubuntu 16.04传感器:hokuyo UTM-30LX laser有两个TX2,第一个连上hok……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2912浏览 0评论2527个赞
Dijkstra算法Dijkstra算法是从一个节点到区域各节点的最短路径算法,解决的是最短路径问题。特点:以起点为中心,向外层层扩展,直到扩展到终点为止。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3411浏览 0评论2556个赞
目的 对AGV循迹过程进行分析,探讨轨道对AGV性能的要求,为设计参考轨道提供指导。 AGV……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3346浏览 0评论801个赞
Aster(A*)算法Aster算法是在Dijkstra算法基础上发展出来的,是在静态路径中用于求解最优路径有效的直接搜索算法,比dijkstra算法多了一个启发式的搜索函数,也就是通过一个代价函数来确定搜索方向(从起点开始向周围扩张,通过代价函数,计……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1960浏览 0评论2111个赞
描述C++求解AX = XB以下的两个代码,虽然可以直接运行,但是我本人使用它们得到的手眼矩阵,旋转矩阵R值的大小看起来是合理的,但位置向量t的三个数值大概都是大于10万的,显然是错误的。但没有时间去研究错误的原因,但是……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3483浏览 0评论311个赞
jetson nano + ubuntu 18.04+128G TF值得一说的是,本篇同样适合jetson TX1与TX2。1.下载库……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2280浏览 0评论2267个赞
作者在读学校SUTD……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3468浏览 0评论455个赞
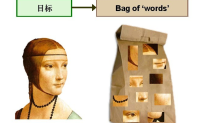
@[toc]一、词袋模型的引出<……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3431浏览 0评论2948个赞
描述使用matlab求解AX=XB的问题可以正确求出X的值,我已经成功验证了至于说X具体代表什么,要结合你自己推导出的公式AX=XB之中,A、X、B分别代表什么代码main.……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1746浏览 0评论634个赞
standard_DH 根据DH表示法确定一个一般步骤为每个关节指定参考坐标系,然后确定如何实现任意两个相邻坐标系之间的变换,最后写出机器人的总变换矩阵。如图所示表示了三个顺序关节和两个连杆,每个关节都是可以转动和平移的。第一个关节指定为关节i-1……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3701浏览 0评论1588个赞
文章目录1 三维空间中的位置与姿态1.1 位置描述1.2 姿态描述2 相关函数详细用法……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2241浏览 0评论1701个赞
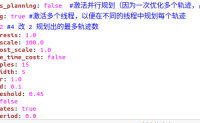
RRT路径规划算法地图RRT算法原理路径平滑处理总结RRT(Rapidly-Exploring Random Tree)算法是一种……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3368浏览 0评论1645个赞
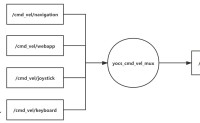
在我们控制一个移动机器人运动时,可能会遇到如下场景:自研的移动机器人在自动导航的过程中突然迷路要撞墙了,一场车祸马上就要发生,这时候,我们就会很希望能够通过无线手柄或者键盘去控制小车紧急停车,让小车改邪归正,迷途知返。想要实现这个功能,就需要用到多路输入复用……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3059浏览 0评论1939个赞
背景介绍目前,市面上大多数的拖动试教机器人是UR的协作机器人和DLR-KUKA的iiwa机器人,相比于UR机器人,iiwa机器人在结构上有一点重要的不同。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2046浏览 0评论1776个赞
前言第一次写博客,内心很激……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2336浏览 0评论1174个赞
写在前面……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2032浏览 0评论2253个赞
在学校听的华为云ModelArts的公开课。其实大部分都是在讲深度学习的入门,也稍微介绍了一下华为云的这个深度学习平台。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3690浏览 0评论453个赞
写在前面……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2489浏览 0评论609个赞
最近在做基于Kinect的手势识别,这里介绍一下Kinect的使用1.Kinect在Qt中的安装下载Kin……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3097浏览 0评论1352个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2447浏览 0评论2877个赞
本人为了对比研究三大经典SLAM算法(Gmapping、Cartographer、Hector)的优缺因此考虑在Turtlebot3仿真环境下对这三个SLAM算法进行测试。没想到测试第一个算法(Google的cartographer)就花……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2105浏览 0评论2010个赞
描述本文将简要介绍机械臂手眼标定原理及相关知识,包会基础知识了解手眼标定原理,就必须先了解一句话,叫做……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3550浏览 0评论615个赞
cartographer+turtlebot+hokuyo|安装配置系统:ubuntu 14.04+ros indigo 或 ubuntu 16.04+ros kinetic平台:turtlebot2传感器:hokuyo U……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2821浏览 0评论1417个赞
目的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2925浏览 0评论2496个赞
*课程资料请到微信公众号“古月居”后台回复“人机交互资料”获取该课程已开通专门交流……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1633浏览 0评论2974个赞
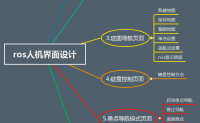
前言在使用ROS的过程中,我们常常需要使用复杂的编译源代码和相关的解析操作,才能单独对某一个任务进行启动。在修改时,也需要单独打开某个文件、编辑、保存,这个过程比较繁琐。这些数据信息均需要在终端中以字符的方式显示出来,键入命令同样需……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3583浏览 0评论1953个赞
1. 引言 上一篇文章主要介绍了机……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2802浏览 0评论2388个赞
1、添加ROS软件源 将以下命令复制到ubuntu的终端执行<……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1892浏览 0评论1488个赞
一、前言该篇为本文的重点,主要内容为cartographer_turtlrbot3源码库的安装二、cartographer_turtlebot源码库安装这里基本参考创客智造的安装教程,但是由于教……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2408浏览 0评论2509个赞
目的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2345浏览 0评论784个赞
决定总结最近一个月的工作,这个月在orbslam2的基础上,使用kineticV2完成了稠密点云地图的重建,实现了点云的回环,并使用octomap转换成实时的八叉树地图,导航部分已经有了思路,打算下个月所一个基于octomap的航迹生成能用在视觉的导航上。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 4141浏览 0评论676个赞
1、做了一个可视化的蒙特卡洛求解工作空间的程序……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2553浏览 0评论1385个赞
通过实例来学习可以说是最快的了,这里开始就是实例了!理论请看前一篇文章:Kalman滤波器的应用解释1……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2424浏览 0评论980个赞
0x00 概述在前面的文章中,我们介绍如何自动导航时,都是基于使用gmapping或者hector_mapping创建的地图。当然使用其他的建图方法创建的地图也可以,但是目前为止,无论使用哪种建图方法。通过激光雷达或深……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2636浏览 0评论2766个赞
二、工业机器人动力学 机器人动力学描述的是关节力矩、动力学参数及关节运动的关系,用于机器人动力学建模的方法很多,如牛顿-欧拉方法、拉格朗日方法、凯恩方法、算子代数方法等。对于同一个机器人,无论采用何……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2805浏览 0评论2845个赞
引言臂形机器人或机械臂是一种我们常见和熟知的机器人类型,机械臂与移动机器人不同,不能再环境中任意移动,有一个固定的基座,因此工作空间有限。非移动的机器人大大简化了诸如感知力和安全性的问题。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 4269浏览 0评论1948个赞
写在前面……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1859浏览 0评论2885个赞