写在前面我参加了浙江省那个机器人竞赛的购物赛,现在还是在比赛的前期准备阶段,在这个购物赛的规则当中,设计的机器人最基本的要求就是需要能够巡这些黑色背景下的白线……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2260浏览 0评论1126个赞
引言……继续阅读 » 小白 5年前 (2021-04-26) 3113浏览 0评论382个赞
1 概述UR机器人提供了多种端口,用于控制和读取机器人信息,本人整理了相关信息,见文章《UR机器人通信端口和协议》。本人使用了3000……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2883浏览 0评论1315个赞
70年代末,随着计算机的应用和传感技术的发展,移动机器人研究又出现了新的高潮。 特别是在80年代中期,设计和制造机器人的浪潮席卷全世界。一大批世界著名的公司开始研制移动机器人平台,这些移动机器人主要作……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2744浏览 0评论1113个赞
3.动态规划3.1 介绍……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2156浏览 0评论1952个赞
在一台机器人中不可避免地会具有很多种传感器(雷达,视觉,深度…);在机器人的导航中对这些传感器的融合,并形成完整的导航策略是很关键的。对于一台室内/室外机器人来讲,传感器的融合主要分为两个方面:融合定位,使用GPS/IMU/里程计/视觉/……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3461浏览 0评论1128个赞
参考:https://blog.csdn.net/u010099080/ar……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3320浏览 0评论1791个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3461浏览 0评论121个赞
这片博客 教你 如何使用TF2 实现 监听 获得 一个 坐标变换在上一篇博客 创建了一个TF2 的 广播者 ,来发布一个 乌龟的位置 到 TF2, 这个博客 将 创建 一个 TF2 的 监听者 来开始使用TF2.……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2963浏览 0评论2312个赞
2020年得第一篇博客,真是好长时间没发博客,这半年里毕业到一家v2x公司之后比较忙,不发博客内心是比较着急,总觉得没记录点啥。年底了,写点东西吧,不然csdn恐怕要取消我博客专家的评级了。接下俩我分两章介绍一下文章,小编手里有两个传感器,6个激光雷达与摄……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2223浏览 0评论2329个赞
参考:https://github.com/juandes/pikachu-detection/blo……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1731浏览 0评论1457个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3484浏览 0评论2035个赞
最近由于研究机器人的运动控制,所以复习和查阅了一些关于坐标系变换的资料,记录一下,以备使用。1 空间点的坐标变换以下公式中,规定几种标识:1) 坐标系A用{A}表示,同理,有{B};2) 左……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3600浏览 0评论239个赞
强化学习(三) – Gym库介绍和使用,Markov决策程序实例,动态规划决策实例1. 引言在这个部分补充之前马尔科夫决策和动态规划部分的代码。在以后的内容我会把相关代码都附到相关内容的后面。本部分代码和将来的代码会参考《……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3031浏览 0评论1727个赞
1、TF2 和 时间……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2947浏览 0评论559个赞
写在前面……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2064浏览 0评论2256个赞
如果QP问题只有等式约束没有不等式约束,那么是可以闭式求解(close form)的。闭式求解效率要快很多,而且只需要用到矩阵运算,不需要QPsolver。 这里介绍Nicholas Roy文章中闭式求解的方法。1. QP……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2932浏览 0评论1910个赞
A*算法是一种Greedy算法,ROS中的navigation导航包中的global_planner中就能找到。今天,我们从头入手,自己移植并完成关于A*算法在ROS上的移植和实现。首先来说一下我们最后想实现的目的:我们……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2781浏览 0评论2334个赞
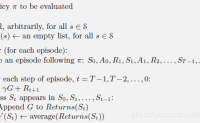
强化学习(四) – 蒙特卡洛方法(Monte Carlo Methods)及实例……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2890浏览 0评论1405个赞
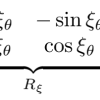
1 欧拉角概念百度百科:欧拉角,用来确定定点转动刚体位置的3个一组独立角参量,欧拉角由章动角θ、旋进角(即进动角)ψ和自转角Φ组成。欧拉角为欧拉首先提出而得名。维基百科:Euler angles,莱昂哈德·欧拉用欧拉角来描述刚……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2609浏览 0评论1869个赞
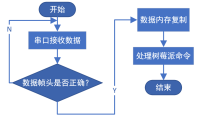
基于STM32F103的红外循迹避障小车设计红外循迹及红外避障实现较简单,无论是51单片机还是STM32单片机,其例程随处可见。但是完全可以运行的Proteus仿真,开源的并不多,更不要说基于STM32单片机的仿真。下面跟大家聊聊基于……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2151浏览 0评论2584个赞
写在前面……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2306浏览 0评论1914个赞
cartographer概述cartographerr是google推出的一套基于图优化的SLAM算法原文:W. Hess, D. Kohler, H. Rapp, and D. Andor, Real-Time Loop C……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2021浏览 0评论2893个赞
前言: 近些年来足式机器人在国内外发展的非常火热,其中控制方法可以说是百花齐放,在MIT开源其基于凸优化的MPC方法之前,许多小伙伴都是采用MIT在很早时候提出的Virtual Model Control(VMC)……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2487浏览 0评论226个赞
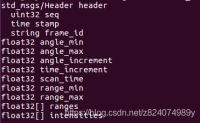
本片博客描述:如何使用 tf2_ros::MessageFilter 处理 Stamped(时间戳) 数据类型在 TF2 的 体系下 如何使用传感器的数据在 实际 情况下 传感器的数据包括: 相机、激光雷达……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3633浏览 0评论2109个赞
线性近似最常使用的函数近似就是线性近似和人工神经网络。本节介绍线性近似。线性近似是用许多特征向量的线性组合来近似价值函数。特征向量则依赖于输入(即状态或状态动作对)。以动作价值近似为例,我们可以为每个状态动作对定义多个不同的特征x ( s , ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3215浏览 0评论1148个赞
超声波避障程序随处可见,基于51单片机的超声波避障小车也很成熟,但是完整的Proteus仿真并不容易找到开源资料。这次主要给大家分享其Proteus仿真部分。涉及到的模块有:超声波模块(hc-sr04)、L293D电机驱动器和直流减速电机。这/样配合51单片机的控制,小车……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2206浏览 0评论1830个赞
上一篇文章我们简单介绍了信息熵的概念,知道了信息熵可以表达数据的信息量大小,是信息处理一个非常重要的概念。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2161浏览 0评论2204个赞
目录一、旋转运动学1.1 线速度与角速度1.2……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2948浏览 0评论2258个赞
由上面一篇文章我们已经知道了,如果我们从真实数据分布里面取n个样本,根据给定样本我们可以列出其出现概率的表达式,那么生成这N个样本数……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3089浏览 0评论2349个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2462浏览 0评论409个赞
Real-Time Loop Closure in 2D LIDAR SLAM文章精读原文:W. Hess, D. Kohler, H. Rapp, and D. Andor, Real-Time Loop Closure in 2D LIDA……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3661浏览 0评论582个赞
1 前言之前写了几篇关于UR机器人网络控制的文章:《UR机器人返回信息格式解析》、《UR机器人通信端口和协议》,有不少读者问关于编程实现方面的问题,因此,这里上传有关的代码,供同行参考。2 包含内容我这里是用VS……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3341浏览 0评论2283个赞
目前,网上大部分源代码有的是基于摄像头检测人物,有的是基于激光雷达信号检测人物,两种方式各有利弊。摄像头检测准确度高,但有死角;激光雷达检测准确度偏低,但能做到360°无死角,基于这个考虑,笔者编写一个算法,集成两者优长,做到智能机器人360°高精度跟踪移动人物。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3016浏览 0评论350个赞
1 概念1.1 机器人本文讨论的机器人,为空间开链连杆机构,其中的运动副(转动副或移动副)常称为关节,关节个数通常即为机器人的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2553浏览 0评论737个赞
强化学习(五) – 时序差分学习(Temporal-Difference Learning)及其实例5.1 TD预测例5.1 回家时……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1907浏览 0评论130个赞
本篇文章是之前期望极大算法(EM算法)文章的后续,有需要可以先看看那篇文章关于EM算法的推导。高斯混合模型……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2274浏览 0评论1590个赞
深度Q学习深度Q学习将深度学习和强化学习相结合,是第一个深度强化学习算法。深度Q学习的核心就是用一个人工神经网络q ( s , a ; w ) , s ∈ S , a ∈ A 来代替动作价值函数。由于神经网络具有强大的表达能力,能够……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2352浏览 0评论1389个赞
AMCL首次启动总有个烦恼的问题,就是手动初始化位姿很难给出准确的,也不会自动更新,像下面这样 像这样做成产品当然不行啦。解决上面的问题主要有两个思想(1)用户给个大概初始位姿,算法自动更新寻找真实值(2……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1904浏览 0评论2904个赞
ROS中的地图ROS中的导航……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3511浏览 0评论1941个赞
作者在读学校Singapore University of ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2127浏览 0评论1561个赞
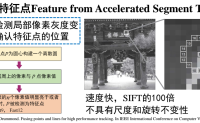
@[toc]一、ORB特征<……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2433浏览 0评论1626个赞
1 概述镜头透镜由于制造精度以及组装工艺的偏差会引入畸变,导致原始图像的失真,即图像畸变。在前一篇文章《机器视觉模型——投影矩阵》中描述了机器视觉系统成像模型,在这个模型里包含了相机内参(与像元尺寸、焦距、像素中心有关)以及相……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3210浏览 0评论1110个赞
在Gan生成对抗神经网络中会用到Jensen不等式,因此做下记录。Jensen不等式告诉我们:如果f ff是在区间[ a , b ] 上的凸函数(就是导数一直增长的函数,或者说是导数的导数大于0的函数),x 是随机变量,那么有:……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3054浏览 0评论753个赞
问题的引出:AMCL的初始位姿通常要求用户手动输入,或者机器加载上一次保存的位姿。AMCL中自带的全局定位服务(globalLocalizationCallback)实际中基本很难用得上。问题解决思路:相机……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2360浏览 0评论931个赞


















![[强化学习实战]函数近似方法-线性近似与函数近似的收敛性](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20201023201342502.png#pic_center&h=123&w=200&q=90&zc=1&ct=1)









![[强化学习实战]深度Q学习-DQN算法原理](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20201023224237312.png#pic_center&h=123&w=200&q=90&zc=1&ct=1)