cartographer概述
cartographerr是google推出的一套基于图优化的SLAM算法
原文:W. Hess, D. Kohler, H. Rapp, and D. Andor, Real-Time Loop Closure in 2D LIDAR SLAM, in Robotics and Automation (ICRA), 2016 IEEE International Conference on.
IEEE, 2016. pp. 1271–1278.
使用语言: C++
开发平台: ROS
开发配置:64位CPU,16 GBRAM,Ubuntu 14.04或16.04,gcc版本4.8.4和5.4.0
架构简介
cartographer 的架构,主要由 Local SLAM 和 Global SLAM 两部分组成
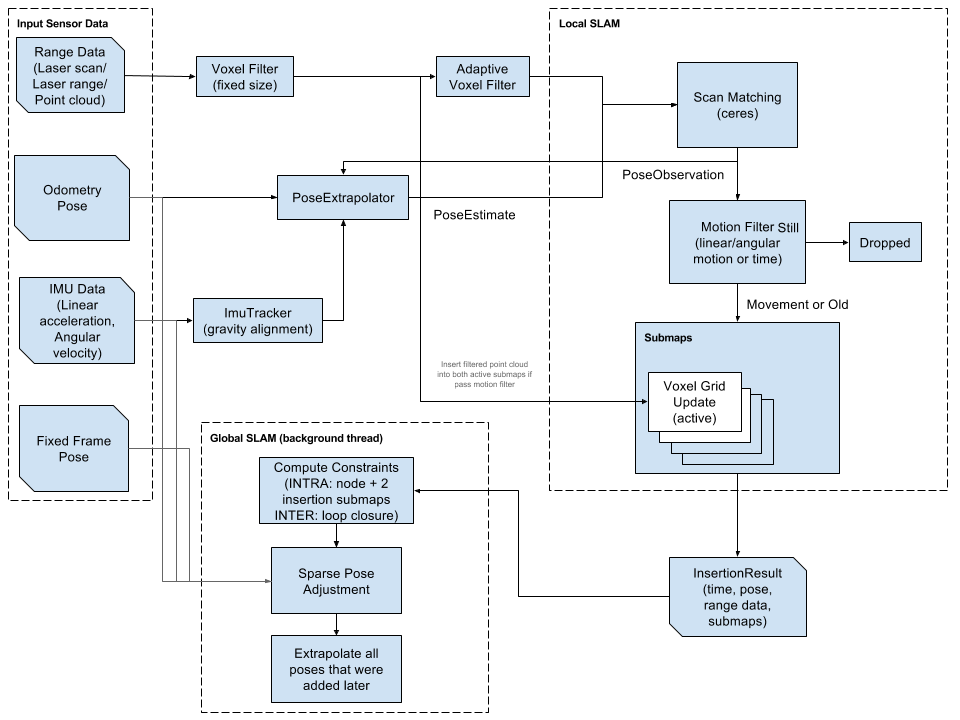
Local SLAM
利用里程计(Odometry)和IMU数据进行轨迹推算,给出小车位姿估计值
将位姿估计值作为初值,对雷达数据进行匹配,并更新位姿估计器的值
雷达一帧帧数据经过运动滤波后,进行叠加,形成子图(submap)
Global SLAM
回环检测
后端优化,全部子图形成一张完整可用的地图
这篇文章只是对cartographer的概述,接下来几篇文章将针对cartographer的论文、程序结构、具体代码,展开详细的介绍




