一个月不见,甚是想念,又和大家见面了,今天主要想和大家聊聊全向轮底盘运动。 首先先介绍一下什么是全向轮吧。全向轮是海丹等人的一款专利产品。全向轮包括轮毂和从动轮,该轮毂的外圆周处均匀开设有3个或3个以上的轮毂齿,每两个轮毂齿之间装设有一从动轮,该从动轮的径向方向……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1978浏览 0评论925个赞
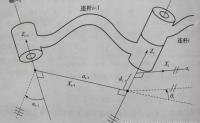
坐标系变换方程 如果有n个未知变换和n个变换方程,这个变换可由变换方程解出。例如:图1中变换……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3848浏览 0评论2123个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1947浏览 0评论2176个赞
1 ROS驱动……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2473浏览 0评论1921个赞
矩阵变换是机器人学的基础,所以Jungle把这一节内容划分到“工业机器人”栏目。这一节Jungle用C++设计了矩阵的类Matrix,并设计了3个方法:矩阵相加add矩阵相乘multiply求……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3133浏览 0评论1929个赞
梯度的定义如下:梯度是一个方向向量,若α是函数在某点的梯度,那么函数在该点沿着α方向的变化最快那么什么是函数的增长方向?任何函数都可以用以下的表示方式表示:……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3045浏览 0评论2099个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1963浏览 0评论1650个赞
位置描述:一旦建立了坐标系,就可以用一个3×1的位置矢量对世界坐标系中的任何点进行定位。因为在世界坐标系中还有其他坐标系,因此必须在位置矢量上附加信息,表明是在哪个坐标被定义的。位置矢量用一个前置的上标来表……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2064浏览 0评论1993个赞
一、前言本文的最后目的是实现Google的cartographer SLAM算法跑在Turtlebot3机器人的仿真环境上作者这样做的目的是为了横向对比三大经典SLAM算法(hector、gmapping、cartographer)<……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2130浏览 0评论648个赞
本文讨论串联机械臂的动力学与控制问题,在加入力矩的情况下控制机器人以期望的位姿运动。以标准的puma560为例做前馈力矩控制(robotics toolbox for matlab 10.3 工具箱中的puma560对象,simulink模型,sl_fforward)。考虑……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3076浏览 0评论1383个赞
在Jungle的上一篇博客里简单介绍了机器人位姿描述与坐标变换的基本知识(矩阵)其中关键点之一是变换算子的左乘和右乘:变换算子左乘:表示该变换是相对固定坐标系变换变换算子右乘:表示该变换是相对动的坐标系(新坐标系)变换。这一节里J……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2690浏览 0评论2081个赞
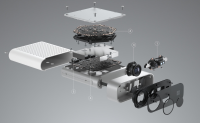
近期有一个项目用到了Azure Kinect,之前Kinect 1与Kinect 2均使用过的老用户,自然不能放过这个机会。为此专门对Azure Kinect进行了学习,以下是这次自己调研摸索的一些成果……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3972浏览 0评论2523个赞
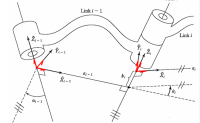
1. 建立各个连杆的坐标轴关节i的轴向方向为坐标系i的Zi轴;取Zi-1和Zi轴的公法线方向为Xi-1轴;若两个Z轴相交,则取两个Z轴的叉积方向作为X轴方向。Zi轴和Xi……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2058浏览 0评论2398个赞
本人研究生关于激光SLAM的一部分工作(激光SLAM的论文有人收真的不容易,感谢机器人期刊),有条件的欢迎下载,代码其实完整性不足,之后正式发表可以开源,希望有感兴趣的同学可以一起完善。论文下载链接:基于多分辨率搜索与多点云密度匹配的快速ICP-SLAM方……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2477浏览 0评论1456个赞
我们是否可以通过计算样例分类的概率来对样例进行分类呢,即一个样例分为正例的概率为0.9,分为反例的概率为0.5,那么我们将该样例分为正例。那么我们的目标就是求P(正)和P(反)。每一个样例都是由多个属性组成的,我们根据属性的取值来计算概率……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2880浏览 0评论130个赞
写在前面……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1644浏览 0评论670个赞
内容说明 : 文章内容翻译自ROS Wiki,也引用了部分《代码整洁之道》书中的内容。ROS C++代码规范与谷歌C++代码规范有诸多相似之处,本文主要讲述在编写ROS C++代码时需要遵守的编程规范。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1924浏览 0评论399个赞
6R机器人运动学分析Jungle在https://blog.csdn.net/sinat_21107433/article/details/78937391提到了6自由度串联机器人D-H建模的方法,其实在很多文献资料里也有。但针对具体的应用,我们使用统……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3420浏览 0评论155个赞
本文参考《Python神经网络编程》的相关章节上文中我们使用神经网络实现对手写数字的识别,那我们反向的给出一个标签,即给出[1, 0, 0, 0, 0, 0, 0, 0, 0, 0],从输出反向推导出输入,应该是什么样子呢?其实可以想象得……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2327浏览 0评论2473个赞
*转载请注明出处 @梦凝小筑前言 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1934浏览 0评论991个赞
三、机器人运动学 从机械的角度看,一个机械手可以用一系列通过转动关节或移动关节连接的刚体(连杆)运动链进行概要表示。链的一端安装在基座上,末端执行器则安装在链的另一端。链结构的运动结果可以通……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2627浏览 0评论1890个赞
参考文献:https://blog.csdn.net/seujss/article/details/77368323……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1632浏览 0评论1275个赞
机器人和计算机视觉中的一个基本要求是能够表示物体在环境中的位置和方向。这些物体包括机器人、摄像机、工件、障碍物和路径。空间中的点是数学中一个熟悉的概念,它可以被描述为一个坐标向量,也被称为一个约束向量,如图 (a) 所示。向量表示点相对于某个参考坐标系的位……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2902浏览 0评论2731个赞
文章目录1、MOVO安装教程MOVO开发硬件需求软件安装连接到MOVO平台2、MOVO机器人……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2657浏览 0评论2243个赞
前言在四足机器人的研究中,有一个很关键的问题,就是如何减少足端在触地瞬间的冲击,避免把机器人把自……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2316浏览 0评论937个赞
使用octomap_server创建八叉树地图和栅格地图说明问题1:点云与网格垂直问题2:八叉树显示不完整问题3:地面……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2883浏览 0评论1658个赞
一 卡尔曼滤波基本步骤……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2679浏览 0评论2325个赞
四、稳定的定义与代数稳定判据4.1 稳定的基本概念和线性系统稳定的充要条件稳定是控制系统的重要性能,也是系统能够正常运行和工作的首要条……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2149浏览 0评论2177个赞
在观看某机器人的视频时,我们看到了这样一个场景:……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2808浏览 0评论851个赞
本文主要讲百度Apollo无人车项目中A*算法的C++实现。 Apollo中有两个地方使用了A*算法,如下。至于为啥不把两个A*算法写成一个统一而且通用的库呢,可能是不方便吧,因为里面有很多细节处理不一样。 1. 在路由规划模块 r……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3461浏览 0评论1828个赞
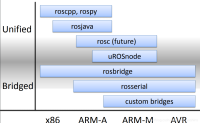
安卓与ROS通信的现状因为ROS官方支持的语言绑定只有C++和Python,所以目前安卓想与ROS通信,必须借助半官方的rosjava包,而Rosjava太重了,因为它……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2213浏览 0评论2158个赞
三维情况实际上是之前讨论的二维情况的延伸。我们在二维坐标系上增加一个额外的坐标轴,通常用 z 表示,它同时与 x 轴和 y 轴正交。 z 轴的方向服从右手规则,并构成右手坐标系。与各坐标轴平行的单位向量……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3369浏览 0评论1891个赞
机器人的位姿描述与坐标变换是进行工业机器人运动学和动力学分析的基础。本节简要介绍上述内容,明确位姿描述和坐标变换的关系,用到的基本数学知识就是——矩阵。1.位姿表示……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2413浏览 0评论1497个赞
Eigen 是一个 C++ 开源线性代数库它提供了快速的有关矩阵的线性代数运算,还包括解方程等功能。Eigen 它是一个纯用头文件搭建起来的库,只能找到它的头文件,没有.so 或.a 那样的二进制文件在使用时,只需引入 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3195浏览 0评论1173个赞
首先展示实现效果,AI守门员请求出战:https://v.douyin.com/erE3dJo/实现条件:1.有……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2753浏览 0评论223个赞
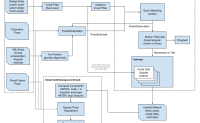
*转载请注明出处 @梦凝小筑1.2 Cartographer 源码软件结构 Cartographer 的源码中,主要有两大部分:&n……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1938浏览 0评论2158个赞
本文Jungle简单实现一个6自由度的工业机器人仿真控制器,用户可以通过界面上6个轴的滑条控制机器人的姿态。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2416浏览 0评论1582个赞
写在前面……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2966浏览 0评论1165个赞
正如在二维情况下一样,我们可以用相对于参考坐标系的坐标轴单位向量表示它们所在坐标系的方向。每一个单位向量有 3 个元素,它们组成了 3×3 阶正交矩阵 ARB :<……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3375浏览 0评论283个赞
1 如何安装……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3213浏览 0评论527个赞
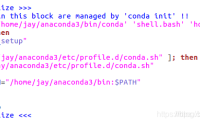
一、Anaconda与Virtualenv虚拟环境Anaconda与Virtualenv可以二选一1.1 A……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1638浏览 0评论765个赞
目录一、写在前面……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1565浏览 0评论2869个赞
引言这期给大家带一个遥控船……继续阅读 » 小白 5年前 (2021-04-26) 3282浏览 0评论606个赞
<……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3192浏览 0评论2133个赞
本文前言 *转载请注明出处 @梦凝小筑 本人的研究方向为激光SLAM,因此对于Google Cartographer 的经典算法十分感兴趣,但是苦于该算法的论文是英文写作,且该论文有着公式多,解释少的特点。因此在看了原论文和……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2393浏览 0评论590个赞