根据之前的配置,我们已经可以通过move_group发送出机械臂各关节运动的轨迹,并且通过三次样条插补的方法,赋予各个关节在特定角度时的速度和加速度,通过启动程序节点可以看到,本次运动规划使用了LBKPIECE算法,并且使用了4线程并行规划,规划时间为3.47875……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1859浏览 0评论368个赞
前言 上一章介绍了一种高效、实时的运动规划算法——JerkLimitedTrajectory(JLT)。 在给定起始状态与终止状态后,该算法能够快速地计算出一条符合三阶积分器动力学模型的运动轨迹。其适用于类似多旋翼无人机的对象,能够解……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2808浏览 0评论793个赞
1. Ubuntu 安装 ROS Kinetic 1.1Configure your Ubuntu repositories(配置您的Ubuntu存储库) &n……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3022浏览 0评论663个赞
错位情况:  3298浏览 0评论2810个赞
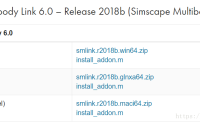
Matlab – Solidworks 机器人建模(4)—— 如何把SolidWorks模型导入到Matlab (Simscape模型) 1.说在前面 本文会介绍怎么直接把solidworks的模型转换成Matla……继续阅读 » 开心洋葱 5年前 (2021-04-26) 4010浏览 0评论1800个赞
在ROS系统的构建中,很多问题是串行的,只能用一个节点进行串行计算。 这样导致的问题是CPU资源并没有完全用到,往往是程序延时很……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1821浏览 0评论1189个赞
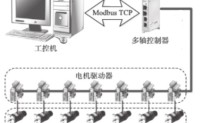
上位机的程序redwall_arm_server.cpp 功能是作为ROS的move_group客户端接收ROS规划的机械臂路点信息,进行三次样条插补获得各个关节或自由度的运动PVAT数据,然后通过TCP通信将处理好的数据发送给下位机的beagle……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2613浏览 0评论2592个赞
由于在树莓派官网下载镜像真的是太慢了,这里给大家百度网盘下载地址: 链接:https://pan.baidu.com/s/1-Qq2DL9PhaIeEP0sJZrGqg 提取码:880u 按正常方式烧录开机就可以了~ 更新源:……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1895浏览 0评论685个赞
Matlab – Solidworks 机器人建模(5)—— 给模型添加摩擦力 0. 前言 建好模型并成功进行一次仿真之后,我们发现虽然模型可以像模像样的产生由重力带来的运动,但是也发现零件可以穿过其他零件,也叫“……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2543浏览 0评论2301个赞
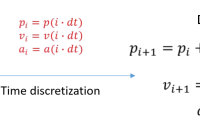
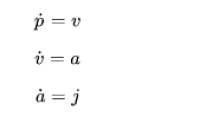
前言 上一篇中简述了模型预测控制在多旋翼飞行器运动规划中的应用。 本篇将针对采用线性MPC的多旋翼飞行器的运动规划方案进行详细推导。 系统模型的离散化 对于多旋翼飞行器这类三阶积分器模型……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2594浏览 0评论2837个赞
向高翔大佬学习,想写一套从零开始的激光SLAM博客记录一下自己学激光SLAM的过程,目前是研一学生,有大佬发现问题请告诉我,或者大家想看啥。 希望囊括slam里ros的基本使用,激光特征提取,地面提取,位姿计算,ceres对于优化的使用,gtsam因子图优化使用,i……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2393浏览 0评论852个赞
1.常用命令: rostopic rosservice rosnode rosparam rosmsg rossrv ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1501浏览 0评论250个赞
前期准备 安装相机驱动详细内容见博客:htt……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1786浏览 0评论2456个赞
前言 本文适用对象: 没有机器人的Solidworks模型自己又懒得画的童鞋没有机器人URDF模型的童鞋 如果你在Matlab帮助里面搜索rigid……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2443浏览 0评论1049个赞
目前机器人行业最火的ROS,人工智能/机器学习方面相对较火的tensorflow,两者结合肯定是让机器人锦上添花,功能更加丰富完善。 正好在GitHub上看到了tensorflow的ROS功能包,验证功能包可行性之后,给大家分享一下。 先看一下效果: ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2363浏览 0评论2713个赞
目录 1.flag2.资料准备3.环境搭建① 系统准备……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3460浏览 0评论361个赞
KDL(kinematic-Dynamic Library)项目是欧洲一些搞机器人的大牛做的一个开源的项目OROCOS(Open Robot Control Software)的一部分,,它产生和发展的历史可见官网(www.orocos.org),对于机器人学领域的同学们,如果想……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1908浏览 0评论2935个赞
文章目录 前言采样信号滤波什么是滤波常见的软件滤波办法……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3285浏览 0评论1862个赞
魔方机器人(一)还原算法 还原算法简介 我使用的是Thislethwaite还原算法.其简介如下:一般的魔方还原的解法……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2142浏览 0评论1034个赞
18cm三轮摄像头图像处理 前言比赛规则设备简述一、扫线方式(八领域)……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2420浏览 0评论2334个赞
目录 1. 前言2. 数据预处理——CoraData类的定义3. GCN层定义……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2386浏览 0评论2336个赞
参数模型 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2162浏览 0评论966个赞
写在前面 我将我的参赛代码已经在GitHub上进行了开源,欢迎大家下载 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1960浏览 0评论2350个赞
写在前面……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1682浏览 0评论1495个赞
写在前面 我将我的参赛代码已经在GitHub上进行了开源,欢迎大家下载 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3123浏览 0评论2115个赞
写在前面 我将我的参赛代码已经在GitHub上进行了开源,欢迎大家下载 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2493浏览 0评论2378个赞
在ROS节点中解析并发送点云数据是非常基础的需求,下面我们将做简单的介绍。 点云数据发送 关于发送节点,只需要声明头文件:  ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1530浏览 0评论2666个赞
转载地址:https://blog.csdn.net/weixin_44578655/article/details/106147052 电磁检测电路方案、运……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3288浏览 0评论1347个赞
借助ROS的工具箱让turtlebot在gazebo中运行起来. Part 1.1: 让turtlebot跑起来  ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2760浏览 0评论2711个赞
背景: 有一些状态需要实时监控,因此需要新建一个线程来处理此事,为了方便维护,线程的调用函数使用线程创建所在类的类方法。 解决方案: 通过线程创建函数pthread_create……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2569浏览 0评论268个赞
上一篇博客为了实现延时特定时间(4ms)并在这段时间内产生PWM波形,方法是通过计算PWM的单次循环时间(PWM的周期),然后计算出循环次数,使用计数器计数,每次循环判断计数器的值是否等于循环次数。这种方法比较简单,对于不熟悉PRU 的我来说比较好用,对于只改变占空比不改变周期,……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3014浏览 0评论306个赞
目录 前言电感排布方案舵机算法修正分段式PD算法……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2047浏览 0评论1555个赞
一、复合摆线轨迹 在四足机器人的研究中,有一个很关键的问题,就是如何减少足端在触地瞬间的冲击,避免把机器人把自己给蹬倒了?这时候就需要一……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2697浏览 0评论1262个赞
1 创建一个package catkin_create_pkg myurdf joint_state_controller robot_state_publ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3417浏览 0评论682个赞
使用xrdp远程连接树莓派Ubuntu mate系统 1) 安装xrdp sudo apt-get install xrdp……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3159浏览 0评论402个赞
仅供个人学习记录 前言 DH法一般用一次就丢,然后后面再需要用的时候就会忘,所以本文整理了DH建模法,方便需要使用的时候进行参考。这里……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3735浏览 0评论353个赞
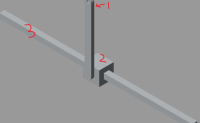
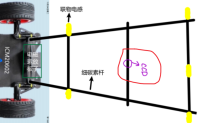
一、问题描述 如右图所示的三自由度机械臂,关节1和关节2相互垂直,关节2和关节3相互平行。如图所示,所有关节均处于初始状态。 要求: (1) 定义并标注出各关节的正方向; (2) 定义机器人基坐标系{0}及连杆坐标系{1},{2},{……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2608浏览 0评论1482个赞
文章目录 介绍minitaur urdf解析base_chassis_linkchas……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3068浏览 0评论914个赞
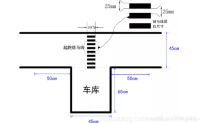
目录 车库元素一览入车库20cm摄像头拍下的车库图起跑线的识……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1986浏览 0评论1453个赞
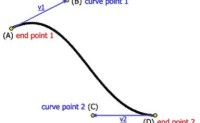
本篇将讲解MiniCheetah中所使用的的足端轨迹方程-贝塞尔曲线方程 一、贝塞尔曲线 贝塞尔曲线就是这样的一条曲线,它是依据四个位置任意的点坐标绘制出的一条光滑……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3437浏览 0评论556个赞
写在前面 我将我的参赛代码已经在GitHub上进行了开源,欢迎大家下载 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2903浏览 0评论416个赞
写在前面我将我的参赛代码已经在GitHub上进行了开源,欢迎大家下载 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1871浏览 0评论618个赞
写在前面 我将我的参赛代码已经在GitHub上进行了开源,欢迎大家下载 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3449浏览 0评论835个赞
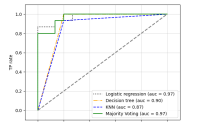
目录 一、认识集成学习 二、基于多数票机制的集成分类器实现 1、多数票机制原理 2、构建多数票分类器 3、多数票分类器实际应用 4、模型评估 三、套袋法(Bagging) 1、葡萄酒数据集样本分类 2、决策区域结果 四、自适应增强法(Adaboo……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3843浏览 0评论1506个赞
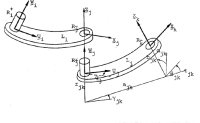
能力强的大佬可以直接看原文《A new geometric notation for open and close-loop robots》 另外……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2338浏览 0评论722个赞





![一起做激光SLAM[一]ros里SLAM常用功能的熟悉](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=http://images.75271.com/Public/Uploads/2021-04-26/微信图片_20210126155822.gif&h=123&w=200&q=90&zc=1&ct=1)



![[ros2学习]-资料准备与环境搭建](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=http://images.75271.com/Public/Uploads/2021-04-26/微信图片_20210123113323.png&h=123&w=200&q=90&zc=1&ct=1)











![ROS URDF(一):自定义robot model —–解决WARN:Fixed Frame [base_link] does not exist](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20181114012713868.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L2JidGFuZzU1Njg=,size_16,color_FFFFFF,t_70&h=123&w=200&q=90&zc=1&ct=1)