在开始介绍本开源项目的机械结构设计之前,先和博友们用一篇博文分享一下机械设计工作相关的特点、性质。抛出结论:笔者觉得在机器人领域,机械结构设计基本上是决定一个产品能否实现或超预期实现预设功能的关键之一,因为一切上层软硬件都是基于机械本体完成的。 一、机械……继续阅读 » Shawn0102 5年前 (2021-04-26) 2178浏览 0评论2994个赞
注:本篇博文全部源码下载地址为:Git Repo传送门……继续阅读 » Shawn0102 5年前 (2021-04-26) 2695浏览 0评论806个赞
文章首发于我的个人博客http://kevinnan.org.cn ……继续阅读 » LucasNan 5年前 (2021-04-26) 2915浏览 0评论452个赞
实验方法将 Robot Application 配成 e……继续阅读 » IBN_Blank 5年前 (2021-04-26) 3181浏览 0评论572个赞
1.引言 本着为大家谋福利的心态,根据自己以往的开发经验,打算写一个从零开始制作一个可以实现地图构建和导航的ROS小车。目前某宝上面有很多现成产品,但是我个……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 2056浏览 0评论392个赞
搭建ROS小车真的难吗?不难……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 2539浏览 0评论2254个赞
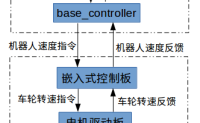
ROS小车的软件结构0……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 2596浏览 0评论417个赞
2.3 STM32电机PID速度控制 之前的文章,完成了直流减速电机的PWM控制、电机测速。本篇文章,将……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 2955浏览 0评论782个赞
2.4 STM32 MPU6050数据获取(IIC + DMP……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 2450浏览 0评论2969个赞
2.6 ROS小车STM32底层控制代码 经过之前几篇文章,我相信大家一定对下面这些模块都已经有些了……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 1621浏览 0评论2008个赞
ROS2的相关课程第一次开设的时间是在2017年的“智能机器人技术综合实训课程说明”(2017-2018-1学期)。当时以一个专题的形式进行简要介绍,2018年扩展了安装、基础、导航等内容(2018-2019-1学期)。The ROS2 course was first held……继续阅读 » zhangrelay 5年前 (2021-04-26) 2817浏览 0评论470个赞
在完成对云实践平台的熟悉后,内测的第二部分实验是SLAM建图和导航。 首先在建立开发项目前,需要创建开发环境,由于内测用户每个账号可以创建两个开发环境,所以这时我新建了一个开发环境。完成创建,进入开发IDE后,我们可以在开发环境主文件夹下新建项目文件夹,每个项目应包……继续阅读 » 9easy_2690 5年前 (2021-04-26) 3309浏览 0评论2907个赞
3.6 ROS小车启动功能包编写……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 3631浏览 0评论661个赞
“Spot “机器人,此前被称为 “SpotMini”,是波士顿动力公司开发的一款四条腿的类似狗的机器人。 详细介绍的短视频在文末,如需简要了解,不必观看视频,个人一直觉得视频的时间成本很高,流量成本很高,制作成本也很高,这三高是相对于图文博客而言。……继续阅读 » zhangrelay 5年前 (2021-04-26) 2536浏览 0评论1180个赞
1、创建功能包创建odom_tf_package功能包 c……继续阅读 » ZEEN 5年前 (2021-04-26) 2746浏览 0评论752个赞
一、准备工作1、下载代码并安装必要功能包 本文代码已上传 github 期待点个star ……继续阅读 » ZEEN 5年前 (2021-04-26) 3503浏览 0评论1009个赞
最近做项目需要用到动态配置PID参数,于是将dynamic_reconfigure学了一下,在此开个博文记录一下过程,同时也希望对有需要的同学能起到一些帮助。 ……继续阅读 » 小黑鸭 5年前 (2021-04-26) 2479浏览 0评论1442个赞
1、前言 前一段时间看过我文章的都知道,我打算写一个SLAM源码阅读的文章,然后,我就去读了Gmapping的源码,感受良多,不足的地方是源码太乱了,阅读起……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 2699浏览 0评论2555个赞
一、复合摆线轨迹 在四足机器人的研究中,有一个很关键的问题,就是如何减少足端在触地瞬间的冲击,避免把机器人把自己给蹬倒了?这时候就需要一……继续阅读 » 我是。 5年前 (2021-04-26) 2393浏览 0评论479个赞
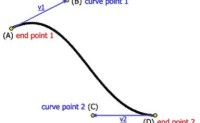
本篇将讲解MiniCheetah中所使用的的足端轨迹方程-贝塞尔曲线方程 一、贝塞尔曲线 贝塞尔曲线就是这样的一条曲线,它是依据四个位置任意的点坐标绘制出的一条光滑……继续阅读 » 我是。 5年前 (2021-04-26) 2657浏览 0评论121个赞
写在前面 2019浙江省的足球机器人小型组对抗赛是4V4的,然后目标就是……继续阅读 » better_coder 5年前 (2021-04-26) 2385浏览 0评论2562个赞
简介 随着人工智能技术的迅速发展,移动机器人导航在拥挤的行人环境中有许多重要的应用,如医院、商场和食堂。在这些人群密集的场景中,安……继续阅读 » 柯南404 5年前 (2021-04-26) 2779浏览 0评论1301个赞
前言 目前课题上在做一些关于异构多机器人协同控制方面的工作(UAV + UGV),实验室里用的移动机器人为ROBOTIS公司的Tu……继续阅读 » 小黑鸭 5年前 (2021-04-26) 1830浏览 0评论2996个赞
一、创建一个新的World 一个World是包含像对象是一个信息的文件,比如他们的样式,它们如何相互约束,天空是怎样的,重力是多少,摩擦力,物体的质量等。不同的对象称为“ 节点”,并在“ 场景树”中进行分层组织。因此,一个节点可能包含子节点。Wor……继续阅读 » 我是。 5年前 (2021-04-26) 3759浏览 0评论309个赞
前言 现在我们开始解决与编程机器人控制器有关的主题。我们将设计一个简单的控制器,避免前面教……继续阅读 » 我是。 5年前 (2021-04-26) 2581浏览 0评论666个赞
本篇文章主要介绍详细介绍如何使用MATLAB机器人工具箱进行机械臂的正逆运动学求解以及轨迹规划,全文附完整的MATLAB程序,本文主要分六部分进行介绍:一、使用改进型DH法建立机械臂模型,二、正运动学求解,……继续阅读 » 慕羽★ 5年前 (2021-04-26) 3032浏览 0评论1815个赞
在前述文篇《解构波士顿动力机器人(一)》中简述了BigDog的技术原理,然而“踹不倒”、在复杂地形行走的运动控制却是技术核心。本文将从Little Dog机器人为本体,分析运……继续阅读 » 挽风 5年前 (2021-04-26) 2693浏览 0评论347个赞
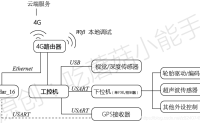
室外低速自动导航车的设计(1)——基础硬件配置 今天我们来开始做基于GPS和16线激光雷达的低速导航车项目。 因为不论做什么车,首先都要把硬件搭建起来,除了基础的机械机构(骨架和壳子)之外,基本的传感器,车轮的驱动器以及工控机都是要有的。 ……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 2634浏览 0评论247个赞
0x00 What’s STDR Simulator? ……继续阅读 » ROS小课堂 5年前 (2021-04-26) 1647浏览 0评论2446个赞
前言 上一篇文章 “多机器人协同控制①——仿真……继续阅读 » 小黑鸭 5年前 (2021-04-26) 2512浏览 0评论1122个赞
描述关于A_算法的一些实现,……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 3615浏览 0评论2590个赞
1. 简介 在移动机器人建图和导航过程中,提供相对准确的里程计信息非常关键,是后续很多工作的基础,因此需要对其进行测试保证没有严重的错误或偏差。实际中最可能发生错误的地方在于机器人运……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 2437浏览 0评论1910个赞
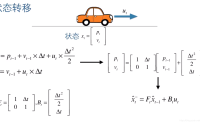
基本概念:1、状态方程: 某一时刻的状态用Xt表示,它是一个列向量,表征了当前位置Pt和当前速……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 2310浏览 0评论1651个赞
……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 2366浏览 0评论2443个赞
之前写的文章分析了全向小车运动原理和基本构型,今天尝试把它部署到 Ros 上。……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 2489浏览 0评论1216个赞