参考资料 廖星宇《深度学习入门之PyTorch》……继续阅读 » 喵木木 5年前 (2021-04-26) 2058浏览 0评论732个赞
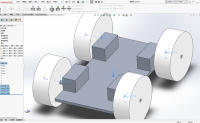
文章目录 1、现实差2、 提高仿真度前提2.1、执行器模型< ……继续阅读 » 我是。 5年前 (2021-04-26) 3196浏览 0评论228个赞
文章目录 SVM涉及的相关概念 分类任务 分类任务进一步理解 SVM算法 SVM所要解决的问题 函数间隔 几何间隔 凸优化基础 拉格朗日对偶性 – 原问题 拉格朗日对偶性 – 对偶问题 原问题与对偶问题之间的关系 线性可分……继续阅读 » 小小何先生 5年前 (2021-04-26) 3919浏览 0评论499个赞
参考资料: 《PyTorch深度学习》(人民邮电出版社)第5章 深度学习之计算机视觉PyTorch官方文档……继续阅读 » 喵木木 5年前 (2021-04-26) 2984浏览 0评论647个赞
有兴趣的可以看一下ROS Wiki上的介绍: Orbbec Astra Pro介绍 astra_camera包介绍 astra_launch包介绍 功能包下载地址,可以直接用步骤里的git clone 发现一篇好文:https://www.ncnynl……继续阅读 » 十啵 5年前 (2021-04-26) 2057浏览 0评论2700个赞
视觉SLAM学习【1】—-基于ubuntu16.04的SLAM中ORB特征点提取及暴力匹配目录 一、ORB特征点提取及暴力匹配定义……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 2577浏览 0评论762个赞
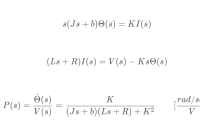
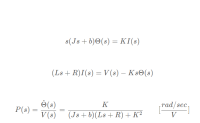
文章目录Matlab 仿真——直流电机速度控制(2)系统分析0. 被控对象与设计要求1. 开环响应 ……继续阅读 » chuchu 5年前 (2021-04-26) 2107浏览 0评论1656个赞
引言 在这个-SLAM建图和导航仿真实例-项目中,主要分为三个部分,分别是 (一)模型构建(二)根据已知地图进行定位和导航(三)使用RTAB-MAP进行建图和导航……继续阅读 » Stan Fu 5年前 (2021-04-26) 3132浏览 0评论194个赞
Client客户端向Server发送请求在海龟仿真器下创建一个新的海龟 1.创建功能包 cd /catkin_ws……继续阅读 » nidie508 5年前 (2021-04-26) 1706浏览 0评论440个赞
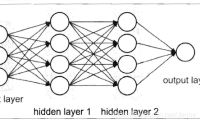
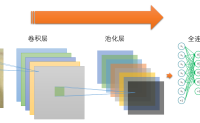
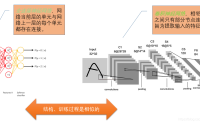
CNN卷积神经网络原理详解(上) 前言卷积神经网络的生物背景我们要让计算机做什么?卷积网络第一层……继续阅读 » 三景页三景页 5年前 (2021-04-26) 2285浏览 0评论1604个赞
文章目录0. 被控对象与设计要求1. 比例控制……继续阅读 » chuchu 5年前 (2021-04-26) 2866浏览 0评论1998个赞
视觉SLAM学习【2】—–ubuntu16.04基于kitti数据集的SLAM中ORB特征点提取及暴力匹配目录 一、Kitti数据集1、……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 3550浏览 0评论2522个赞
rosserial_arduino包可让ROS和ArduinoIDE一起工作 rosserial提供的ROS通讯协议工作在Arduino的UART上,它让Arduino成为标准的ROS节点,可以发布和订阅ROS消息,发布TF转换,获取ROS系统时间。 ……继续阅读 » 十啵 5年前 (2021-04-26) 2760浏览 0评论1779个赞
引言 前一阵子一直在忙着期末考试,拖了很久,先跟各位说声抱歉呀,这章我们继续完成上一节未完成的内容。拿到了PCB焊接完了之后呢。我们就需要对这个……继续阅读 » 小白 5年前 (2021-04-26) 3491浏览 0评论495个赞
1,ROS 根据W. S. Newsman 在“A Systematic Approach to Learning Robot Programming With ROS”中提到。 ROS (robot……继续阅读 » 光头明明 5年前 (2021-04-26) 3034浏览 0评论1920个赞
文章目录指数家族伯努利分布转指数家族……继续阅读 » 小小何先生 5年前 (2021-04-26) 3328浏览 0评论985个赞
视觉SLAM学习【3】—–视觉SLAM通过三角测量和PnP法估计特征点的空间位置目录一、G2O的安装1、g2o的下载2……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 1638浏览 0评论2434个赞
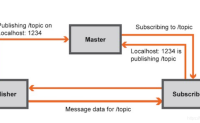
文章目录 准备工作创建Publisher创建Subscriber运行Publisher与Subscri……继续阅读 » 十啵 5年前 (2021-04-26) 2568浏览 0评论2609个赞
引言 在这个-SLAM建图和导航仿真实例-项目中,主要分为三个部分,分别是 (一)模型构建(二)根据已知地图进行定位和导航(三)使用RTAB-MAP进行建图和导航……继续阅读 » Stan Fu 5年前 (2021-04-26) 1685浏览 0评论2449个赞
在海龟仿真器下输入按键,通过服务端接收数据,并把数据发送给海龟仿真器1.创建功能包 在上一篇博客创建的功能包下开发,所以就不用创建了 然后在你创建的lear……继续阅读 » nidie508 5年前 (2021-04-26) 2478浏览 0评论1225个赞
通过rostopic list 可以查看发布的话题,可以看到有/tag_detections和/tf话题,那麽我们先编写订阅/tag_detections,然后根据此模板订阅成/tf ……继续阅读 » 光头明明 5年前 (2021-04-26) 1861浏览 0评论2180个赞
创建一个request,里面包含学生的年龄性别姓名,发送给服务端,服务端再反馈response 如何自定义服务数据 定义srv文件在package.xml中添加功能包……继续阅读 » nidie508 5年前 (2021-04-26) 1629浏览 0评论2315个赞
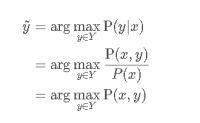
正在学,把网上优质文章整理了一下。 我们经常利用贝叶斯公式求posterior distribution ……继续阅读 » 小小何先生 5年前 (2021-04-26) 2335浏览 0评论1592个赞
……继续阅读 » Stan Fu 5年前 (2021-04-26) 2437浏览 0评论2150个赞
CNN卷积神经网络原理详解(下) 反向传播前向传播过程反向传播过程……继续阅读 » 三景页三景页 5年前 (2021-04-26) 2930浏览 0评论1777个赞
参考资料:《PyTorch深度学习》(人民邮电出版社)第6章 序列数据和文本的深度学习PyTorch官方文档……继续阅读 » 喵木木 5年前 (2021-04-26) 3316浏览 0评论2598个赞
目录 一、开篇前言二、数据集三、集成管道方法训练模型……继续阅读 » Charzous 5年前 (2021-04-26) 2852浏览 0评论1846个赞
参考资料: web3.0与Semantic Web编程(中文版)……继续阅读 » 喵木木 5年前 (2021-04-26) 3105浏览 0评论781个赞
第十六届智能车竞赛规则……继续阅读 » 小白 5年前 (2021-04-26) 2373浏览 0评论869个赞
一. 前言 上一篇中详细阐述了MATLAB系统辨识工具箱的使用实例,本篇将以多旋翼飞行器为研究对象,详细阐述其刚体动力学模型、飞行控制刚体模型以及控制效率模型。最后,针对多旋翼飞行器控制系统设计当中的主要系统辨识问题进行解析。 ……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 1537浏览 0评论2436个赞
fake_ar_publisher::ARMarkerConstPtr last_msg_;void visionCallback(const fake_ar_publisher……继续阅读 » 光头明明 5年前 (2021-04-26) 3123浏览 0评论133个赞
对推荐系统还没有直观理解的同学可以参考之前所写的文章:推荐系统与人工智能概述 协同过滤(……继续阅读 » 小小何先生 5年前 (2021-04-26) 2124浏览 0评论860个赞
1.运行小海龟仿真工具 ……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 2831浏览 0评论2084个赞
CNN卷积神经网络原理详解(中) 卷积神经网络与全连接神经网络的比较卷积运算的数学解释卷积计算的工作模式……继续阅读 » 三景页三景页 5年前 (2021-04-26) 1927浏览 0评论1481个赞
……继续阅读 » 喵木木 5年前 (2021-04-26) 1795浏览 0评论2202个赞
一. 前言 上一篇文章中,我们对多旋翼飞行器进行了详细的建模,对其刚体动力学模型、刚体运动学模型以及控制效率模型进行了详细的介绍,了解建模对于多旋翼飞行器控制系统设计的重要性,建模以及系统辨识技术在多旋翼飞行器设计中起到的作用。 &nbs……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 1803浏览 0评论404个赞
官网地址:NLP FROM SCRATCH: TRANSLATION WITH A SEQUENCE TO……继续阅读 » 喵木木 5年前 (2021-04-26) 2019浏览 0评论1953个赞
创建功能包 $ cd ~/catkin_ws/src$ catkin_create_pkg learning_tf roscpp……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 2372浏览 0评论636个赞
排序学习一般被认为是supervised learning中的一个特例,谈到supervised learning其loss function一般表示为如下形式: ……继续阅读 » 小小何先生 5年前 (2021-04-26) 1906浏览 0评论2290个赞
机器学习概述:什么是机器学习? 什么是机器学习机器学习的发展历史常见的机器学习算法框架常见的机器学习开……继续阅读 » 三景页三景页 5年前 (2021-04-26) 2010浏览 0评论1224个赞
3D点云特征描述与提取是点云信息处理中最基础也是最关键的一部分,点云的识别。分割,重采样,配准曲面重建等处理大部分算法,都严重依赖特征描述与提取的结果。从尺度上来分,一般分为局部特征的描述和全局特征的描述,例如局……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 1996浏览 0评论1748个赞
视觉SLAM学习【4】—–ubuntu16.04上KDevelop的安装、配置、项目创建以及外部嵌入式项目导入目录 一、KDevelop的安装 &n……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 2906浏览 0评论2566个赞
Matlab 仿真——直流电机速度控制(4)通过根轨迹法进行控制器设计 1. 受控对象与设计要求 受控对象 ……继续阅读 » chuchu 5年前 (2021-04-26) 3377浏览 0评论1188个赞
文章目录 Unified……继续阅读 » 小小何先生 5年前 (2021-04-26) 3074浏览 0评论1454个赞
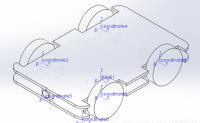
机器人中的坐标变换 ……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 1989浏览 0评论1921个赞