……继续阅读 » bug404 5年前 (2021-04-26) 1916浏览 0评论304个赞
场景建模 一、介绍 1、打开场景编辑器 UI介绍 二、导入平面图 三、添加特征 墙壁……继续阅读 » 我是。 5年前 (2021-04-26) 3548浏览 0评论585个赞
1.原理 一般情况下,我们要处理是一副具有固定分辨率的图像。但是特别情况下我们需要对同一个图像的不同分辨率的子图像进行处理,如查找图像中的某个目标,如人脸,我们不知道目标在图像中的尺寸大小。这种情况下,我们需要创建一组图像,这些图像是具有不同分辨率……继续阅读 » Eragonl 5年前 (2021-04-26) 2816浏览 0评论107个赞
目录 前言1 配置环境① 背景……继续阅读 » 越来越胖了_mengleijin 5年前 (2021-04-26) 1908浏览 0评论1776个赞
获取RRbot模型 1、获取RRbot模型2、在rviz中查看……继续阅读 » 我是。 5年前 (2021-04-26) 2835浏览 0评论1723个赞
什么是轮廓 轮廓可以简单认为成连续的点(连着边界)连在一起的曲线,具有相同的颜色或者灰度。轮廓在形状分析和物体的检测和识别中很有用。 ·为了准确,要使用二值化图像。需要进行阀值化处理或者Canny边界检测。 ·查找轮廓的函数会修改原始……继续阅读 » Eragonl 5年前 (2021-04-26) 2082浏览 0评论1156个赞
这节主要来详细说一下神经网络。从神经网络定义到M-P模型再扩展到单层感知机、多层前馈神经网络、再到深层神经网络。(本文有一些概念省略了,若有写得……继续阅读 » 小小何先生 5年前 (2021-04-26) 1953浏览 0评论2320个赞
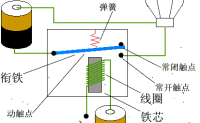
最近老师定做了一个气动手抓,手抓的原理简单,主要是通过气泵充气后,通过24v电压控制,进而以通电和放电的方式来使手抓闭合和张开,此时可以用一个继电器来自动控制手抓电源。 首先分析一下继电器大致原理:如图所示,可以简化理解成通过给线圈通电后,然后产生电磁效应,使衔铁向……继续阅读 » 光头明明 5年前 (2021-04-26) 3617浏览 0评论406个赞
文章目录 ① 背景② 前提③ 任务 ……继续阅读 » 越来越胖了_mengleijin 5年前 (2021-04-26) 3530浏览 0评论1965个赞
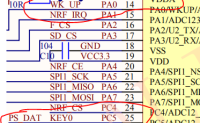
注意:这里使用的是STM32F103RCT6芯片,正点原子迷你版 使用其他板子注意芯片的选择 1.首先新建一个文件夹,并且建立四个子文件夹,分别叫做USER,CORE,OBJ,STM32F10x_FWlib &nb……继续阅读 » 思索与猫 5年前 (2021-04-26) 1956浏览 0评论2713个赞
文章目录 一、算法简介1、关键点……继续阅读 » 我是。 5年前 (2021-04-26) 2190浏览 0评论2017个赞
① 背景 Turtlesim (小乌龟是第一步)就像是 hello world 一样 rqt 是命令行的GUI工具,可以点点点的 ……继续阅读 » 越来越胖了_mengleijin 5年前 (2021-04-26) 2692浏览 0评论2797个赞
这节我们来讲说一下决策树。介绍一下决策树的基础知识、决策树的基本算法、决策树中的问题以及决策树的理解和解释。 本文主要思路结构如下……继续阅读 » 小小何先生 5年前 (2021-04-26) 3429浏览 0评论841个赞
本文借鉴很多这个链接的内容,之后加了一些新的注释。 目录……继续阅读 » Eminbogen 5年前 (2021-04-26) 2372浏览 0评论1800个赞
1.1长宽比 边界矩形的宽高比 x,y,w,h=cv2.boundingRect(cnt)aspect_ratio = float(w)/h……继续阅读 » Eragonl 5年前 (2021-04-26) 3184浏览 0评论139个赞
一,配置环境 硬件: UR5工业机器人 Kinect V2 软件: 注意我是将下面包安装在ros下工作目……继续阅读 » 光头明明 5年前 (2021-04-26) 3281浏览 0评论292个赞
文章目录 ① 背景② 前提③ 任务 ……继续阅读 » 越来越胖了_mengleijin 5年前 (2021-04-26) 2695浏览 0评论1128个赞
文章目录 一、PPO主体1、主结构……继续阅读 » 我是。 5年前 (2021-04-26) 2075浏览 0评论2688个赞
PID控制算法是一个在工业控制应用中常见的反馈回路算法,它把收集到的数据和一个参考值进行比较,然后把这个差别用于计算新的输入值,从而使得整个系统更加准确而稳定。 PID控制算法由比例单元(Proportional)、积分单元(Integral)和微分单元(Deriv……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 3187浏览 0评论616个赞
原理: 注意:这里使用迷你版,其他版本IO口设置不同,详细请查询原理图 ……继续阅读 » 思索与猫 5年前 (2021-04-26) 1806浏览 0评论1229个赞
1 凸缺陷 找到凸缺陷 hull=cv2.convexHull(cnt,returnPoints=False)defects=cv……继续阅读 » Eragonl 5年前 (2021-04-26) 2372浏览 0评论2786个赞
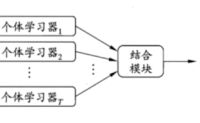
中国有句老古话,叫“三个臭皮匠顶个诸葛亮”,说的是人多力量大,可也有句成语叫“乌合之众”。在机器学习中也有一类算法,将这两种思想融合起来,取其精华,它就是集成学习,算法将不同的学……继续阅读 » 小小何先生 5年前 (2021-04-26) 2838浏览 0评论467个赞
&nb……继续阅读 » nidie508 5年前 (2021-04-26) 1882浏览 0评论688个赞
本节证明并未从集成学习源头开始,如若对集成学习还不是很清楚的同学,参考文章: 经典机器学习系列之【集成学习】 ……继续阅读 » 小小何先生 5年前 (2021-04-26) 2491浏览 0评论1422个赞
原理: ……继续阅读 » 思索与猫 5年前 (2021-04-26) 2296浏览 0评论1985个赞
本篇将会创建几个基本的仿真环境,包含了一些必要的功能函数,实现动态调整离地高度。能够与决策模型进行交互,为后续强化学习训练做准备 文章目录 一、框架……继续阅读 » 我是。 5年前 (2021-04-26) 3835浏览 0评论1757个赞
……继续阅读 » 小小何先生 5年前 (2021-04-26) 3390浏览 0评论1384个赞
文章目录 ① 背景② 前提③ 任务 ……继续阅读 » 越来越胖了_mengleijin 5年前 (2021-04-26) 3070浏览 0评论528个赞
一般情况下我们称外部的形状为父,内部的形状为子。按照这种方式分类,一幅图像中的所有轮廓之间就建立父子关系。这样我们就可以确定一个轮廓与其他轮廓是怎样连接的,它是不是某个轮廓的子轮廓,或者是父轮廓。这种关系就成为组织结构。 ……继续阅读 » Eragonl 5年前 (2021-04-26) 2503浏览 0评论2724个赞
这些东西见过很多遍,不少也用过很多遍,新年新开端,简单地系统总结一下吧。 目录 路径问题宽度优先搜索……继续阅读 » Eminbogen 5年前 (2021-04-26) 2822浏览 0评论1639个赞
摄像头这种精密仪器对光学器件的要求较高,由于摄像头内部与外部的一些原因,生成的物体图像往往会发生畸变,为了避免数据源造成的误差,需要针对摄像头的参数进行标定。ROS官方提供了用于双目和单目摄像头标定的功能包——camera_calibration。 机器视觉功能包下……继续阅读 » 十啵 5年前 (2021-04-26) 1836浏览 0评论2079个赞
相似性度量是机器学习中一个非常基础的概念:是评定两个事物之间相似程度的一种度量,尤其是在聚类、推荐算法中尤为重要。其本质就是一种量化标准。在机器学习中主要是用于衡量样本之间的相似程度。 为什么要有一个衡量标准?这世间万物都是公说公有理,婆说婆有理,而这衡量标准一旦定……继续阅读 » 小小何先生 5年前 (2021-04-26) 3356浏览 0评论134个赞
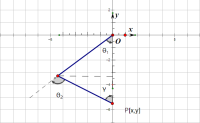
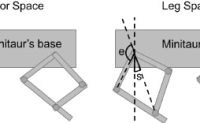
不考虑横向运动时,我们可以把四足机器人的腿部简单看成一个二连杆结构,这节我们就来讲解如何调整离地高度的问题 一、几何模型 我们可以把机器人的一条腿简化成以下形状,由两根连杆组成,……继续阅读 » 我是。 5年前 (2021-04-26) 1705浏览 0评论763个赞
1.roslaunch 命令 roslaunch 命令允许我们一次启动 launch 文件中定义的多个 ROS 节点,启动参数等在启动文件(launch 文件)中配置,并且如果系统之前没有启动 roscore,则 roslaunch……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 2446浏览 0评论1694个赞
文章目录 一、项目背景二、数据处理1……继续阅读 » Charzous 5年前 (2021-04-26) 1847浏览 0评论1550个赞
参考资料: 《Pytorch深度学习》(人民邮电出版社)第三章 深入了解神经网络 《Pytorch深度学习》(人民邮电出版社)第四章 机器学习基础Pytorch官方文档……继续阅读 » 喵木木 5年前 (2021-04-26) 1874浏览 0评论2339个赞
深度学习模型的调优,首先需要对各方面进行评估,主要包括定义函数、模型在训练集和测试集拟合效果、交叉验证、激活函数和优化算法的选择等。 那如何对我们自己的模型进行判断呢?——通过模型训练跑代码,我们可以分别从训练集和测试集上看到这个模型造成的损失大小(loss),还有……继续阅读 » Charzous 5年前 (2021-04-26) 3227浏览 0评论1258个赞
在《战国策·齐策三》中有这么一句话:“物以类聚,人以群分”,用于比喻同类的东西常聚在一起,志同道合的人相聚成群,反之就分开。而所谓的科学,不过是把我们日常的生活经验,大自然的规律用数学的语言描述出来罢了。在机器学习中也有这么一类算法,聚类算法,借……继续阅读 » 小小何先生 5年前 (2021-04-26) 2191浏览 0评论1327个赞
环境: Ubuntu16.04 ROS kinetic C++ 1.新建ROS工作空间 mkdir -p PointCloundShow_ws/src……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 3653浏览 0评论459个赞
一、minitaur 简介 这是来自宾夕法尼亚大学的一款机器人,叫 Minitaur,看图你就明白了。 ……继续阅读 » 我是。 5年前 (2021-04-26) 2747浏览 0评论346个赞
机器人运动学与动力学入门(一)自由度与连杆机构 在讨论机器人运动之前,先复习一些基本概念(啰里吧嗦环节)。已经了解的童鞋可以自行跳过该节。 1.自由度(degree of freedom)  ……继续阅读 » chuchu 5年前 (2021-04-26) 2469浏览 0评论2025个赞
文章目录 模型概要1、状态、决策空间(略)2、奖励函数3……继续阅读 » 我是。 5年前 (2021-04-26) 2994浏览 0评论1810个赞
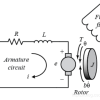
文章目录Matlab 仿真——直流电机速度控制(1)直流电机建模1. 物理模型 <……继续阅读 » chuchu 5年前 (2021-04-26) 2305浏览 0评论1296个赞
ROS学习【18】—–利用Gazebo搭建赛道,控制小车完成比赛目录一、 ROS仿真功能包下载编译……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 2267浏览 0评论395个赞
ROS Kinetic的安装配置请点 环境:Ubuntu 16.04+ROS Kinetic 关于雷达初次尝试……继续阅读 » 十啵 5年前 (2021-04-26) 3138浏览 0评论2081个赞

![[ros2学习]-CLI Tools](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20200402100521112.png&h=123&w=200&q=90&zc=1&ct=1)


![[ros2学习]-CLI Tools – 配置环境](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=http://images.75271.com/Public/Uploads/2021-04-26/微信图片_20210103191339.png&h=123&w=200&q=90&zc=1&ct=1)
![[ros2学习]-CLI Tools – 介绍turtlesim和rqt](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20200402105312598.png&h=123&w=200&q=90&zc=1&ct=1)
![更加多注释地学习视觉SLAM第九讲程序[1]](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://blog.75271.com/wp-content/themes/com75271/css/img/pic/3.jpg&h=123&w=200&q=90&zc=1&ct=1)


![[ros2学习]-CLI Tools – 了解ROS 2节点(node)](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=http://images.75271.com/Public/Uploads/2021-04-26/微信图片_20201231123920.gif&h=123&w=200&q=90&zc=1&ct=1)




![[ros2学习]-CLI Tools – 了解ROS 2主题(topics)](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=http://images.75271.com/Public/Uploads/2021-04-26/微信图片_20210104120520.png&h=123&w=200&q=90&zc=1&ct=1)