这是我见过讲解最详细最通俗易懂的决策树(二)增益率基尼指数剪枝处理……继续阅读 » 三景页三景页 5年前 (2021-04-26) 2028浏览 0评论466个赞
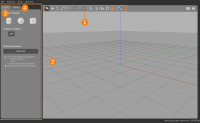
创建模型 本节目标一、模型编辑器用户界面调色板(左面板)工具……继续阅读 » 我是。 5年前 (2021-04-26) 3051浏览 0评论432个赞
【从零开始的ROS四轴机械臂控制(六)】 九、逻辑控制节点1.运动……继续阅读 » Stan Fu 5年前 (2021-04-26) 3784浏览 0评论2365个赞
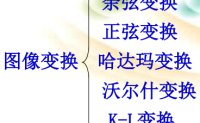
本节主要目的是介绍本书所用到的数字图像的变换,方便之后的处理。来源于东北大学 魏颖教授的数字图像课程笔记。 傅里叶变换 信号处理方法有……继续阅读 » 小小何先生 5年前 (2021-04-26) 2031浏览 0评论2505个赞
一. 前言 PID控制算法是工业控制领域数十年来应用最广泛的经典控制算法之一,其理论原理易于理解,算法结构简单,易于工程实现,这也是其受到工程师们青睐的重要原因。 尽管算法原理简单,其参数整定难度却因被控对象而异,不同工程师对同……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 2210浏览 0评论1418个赞
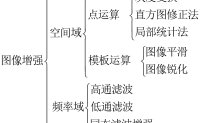
本节主要目的是介绍图像增强的一些基本概念。来源于东北大学 魏颖教授的数字图像课程笔记。 本节要点 ……继续阅读 » 小小何先生 5年前 (2021-04-26) 3193浏览 0评论1804个赞
从零开始的ROS四轴机械臂控制(七)十、ROS与arduino连接1.虚拟机与……继续阅读 » Stan Fu 5年前 (2021-04-26) 3527浏览 0评论663个赞
本文主要介绍如何利用MATLAB编程或者Simulink工具绘制伯德图和奈奎斯特图 ……继续阅读 » 慕羽★ 5年前 (2021-04-26) 3119浏览 0评论1735个赞
文章目录Step 1 建立基本的sdf模型1、创建新的.world文件2、添加地面和光线……继续阅读 » 我是。 5年前 (2021-04-26) 3354浏览 0评论1250个赞
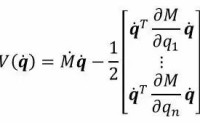
Sympybotics Sympybotic是一款使用python语言利用Sympy和Numpy包的开源机器人运动学和动力学的符号推导工具包,在机器人动力学参数辨识中可以用来建立机器人动力学模型,根据所建模型推导动力学最小惯性参数集和观测矩阵,并可……继续阅读 » 小磊在路上 5年前 (2021-04-26) 3711浏览 0评论187个赞
……继续阅读 » 今夜有雨 5年前 (2021-04-26) 2893浏览 0评论2911个赞
文章目录一、介绍二、准备网格模型三、将网格模型添加到sdf文件中 ……继续阅读 » 我是。 5年前 (2021-04-26) 2124浏览 0评论598个赞
目录 一、总体介绍二、布局设计1.机架2.……继续阅读 » 手可摘星辰不敢高声语 5年前 (2021-04-26) 2691浏览 0评论1175个赞
目录1. 前言2. 环境说明3. 插件安装3.1 ROS插件3……继续阅读 » hitgavin 5年前 (2021-04-26) 3260浏览 0评论929个赞
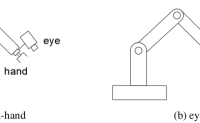
在我们进行机械臂抓取实验时候,总是少不了相机的标定环节。我认为相机标定可以分为两个部分。 一个部分是相机外参的标定,也就是获得相机坐标系与世界坐标系的关系,在我们的系统中,世界坐标系是可以自定义的。其中眼在手上的标定,不变的是相机与机械臂末端的坐标转换。通过手眼标定获得这两者的转……继续阅读 » 光头明明 5年前 (2021-04-26) 2865浏览 0评论225个赞
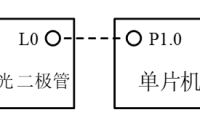
本系列共6篇文章,本文作为本系列的第一篇文章,介绍实验一 :数字量输入输出,本系列文章基于Dais-52PRO实验箱。……继续阅读 » 慕羽★ 5年前 (2021-04-26) 3244浏览 0评论1883个赞
本节主要目的是介绍图像复原一些基本概念,如图像退化/复原过程的模型,图像复原的滤波方法,包括非约束复原(逆滤波)、有约束复原(维纳滤波)、非线性约束还原(最大熵),还有几何失真复原,来源于东北大学 魏颖教授的数字图像课程笔记。 <……继续阅读 » 小小何先生 5年前 (2021-04-26) 3031浏览 0评论1289个赞
一、螺旋桨 螺旋桨是直接产生无人机运动所需力与力矩的部件合适的螺旋桨对提高无人机性能和效率 ……继续阅读 » 手可摘星辰不敢高声语 5年前 (2021-04-26) 3407浏览 0评论2160个赞
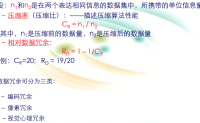
本节主要目的是介绍图像压缩的一些基本概念,主要包括图像压缩的基本概念、PCM编码、无损压缩、有损压缩、压缩标准。来源于东北大学 魏颖教授的数字图像课程笔记。 图像压缩的基本概念 数据冗余……继续阅读 » 小小何先生 5年前 (2021-04-26) 2738浏览 0评论2322个赞
双目相机计算稠密深度点云 1、ZED相机驱动包 2、校准Z……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 3185浏览 0评论2760个赞
文章目录 传感器噪音Step1 可视化传感器数据Step2 添加噪声一、介绍……继续阅读 » 我是。 5年前 (2021-04-26) 3682浏览 0评论2147个赞
准备了半年多的博士考试终于结束了!现在开始整理半年来没来得及发的一些技术总结。 ……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 3395浏览 0评论1971个赞
控制机械臂的电机有三种: 伺服电机步进电机舵机 1. 本次实验所使用的舵机有两种: LD……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3482浏览 0评论2554个赞
参考图书: web3.0与Semantic Web编程(中文版) ……继续阅读 » 喵木木 5年前 (2021-04-26) 2323浏览 0评论1688个赞
1. 引言……继续阅读 » hitgavin 5年前 (2021-04-26) 3044浏览 0评论1841个赞
本系列共6篇文章,本文作为本系列的第三篇文章,介绍实验三 :定时/计数器实验,本系列文章基于Dais-52PRO实验箱。 ……继续阅读 » 慕羽★ 5年前 (2021-04-26) 2117浏览 0评论2379个赞
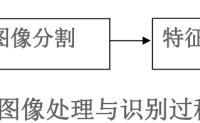
本节主要目的是介绍图像分割的一些基本概念。来源于东北大学 魏颖教授的数字图像课程笔记。 本节重点:1)图像分割的基本概念及图像分割分类的基础;2)边缘分割法;3)阈值分割法;4)区域分割法。 <……继续阅读 » 小小何先生 5年前 (2021-04-26) 2302浏览 0评论1789个赞
由于疫情原因不能进入实验室,遂学习在仿真环境gazebo下利用UR5机械臂搭建模拟平台,此模拟平台可以用于UR5机械臂通用视觉抓取平台。以下是个人总结一些观点,仅供参考。 1. 环境搭建 世界环……继续阅读 » 光头明明 5年前 (2021-04-26) 2451浏览 0评论2824个赞
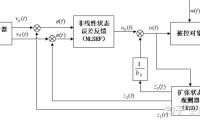
一. 前言 上篇中详细阐述了几种经典的PID控制算法及其存在的问题以及改进思路了,本篇将围绕韩京清教授开创的自抗扰控制算法进行阐述,该算法为工业控制领域带来了一项可操性极强的自动控制技术。 二. ADRC……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 2009浏览 0评论162个赞
本文主要介绍OpenCv对图像的一些基本处理。包括图片、视频读取,读取感兴趣窗口,通道分离与合并,边界填充,直接对像素点进行操作,以及两张图片的融合。 图片的读取 读取图片是OpenCv最基本的功能,实现起来也比较简单,调用……继续阅读 » 小小何先生 5年前 (2021-04-26) 2181浏览 0评论989个赞
一、简述 机器人控制系统是一个复杂设计,针对不同功能目标有不同的开发路线,若想开发一个通用的控制系统难度会非常高,因此确定目标需求非常重要,这里所述的目标需求有两种,一种为开发基本的控制系统再根据实际条件进行功能添加开发,另外一种为针对特殊情况开发……继续阅读 » white_Learner 5年前 (2021-04-26) 1866浏览 0评论1420个赞
神经网络,机器学习,可以说是现在最流行的计算机技术,TensorFlow是谷歌开源的机器学习框架,听起来就很高大上,很难学习,不幸的是国内的一些教程都是原文翻译谷歌官方教程,非常难以学习,所以本系列教程就是用比较容易懂的语言来教大家什么tensorflow。 首先t……继续阅读 » DiegoRobot 5年前 (2021-04-26) 2566浏览 0评论2480个赞
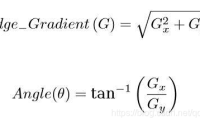
事先说明 图像梯度原理:简单来说就是求导 OpenCV提供了三种不同的梯度滤波器,或者说高通滤波器:Sobel,Scharr和Laplacian。Sobel和Scharr是求一阶或二阶导数。Scharr是对Sobel(使用小的卷积核求……继续阅读 » Eragonl 5年前 (2021-04-26) 2439浏览 0评论847个赞
插件配置一、准备工作二、创建一个API三、测试消息传递API……继续阅读 » 我是。 5年前 (2021-04-26) 3198浏览 0评论705个赞
一. 前言 上篇中详细阐述了经典的自抗扰控制算法的原理,本篇将围绕两种ADRC算法展开,针对扩张状态观测器的参数整定问题进行详解,同时,对跟踪微分器的几个重要应用进行介绍。 二. 两种……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 3902浏览 0评论615个赞
贝叶斯决策、概率估计 Introduction 将未知的东西,进行正确的类别划分,叫做cla……继续阅读 » 小小何先生 5年前 (2021-04-26) 2919浏览 0评论552个赞
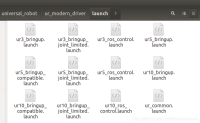
使用UR机械臂最新的 ur_robot_driver ……继续阅读 » bug404 5年前 (2021-04-26) 2002浏览 0评论2629个赞
连接ros添加ROS插件在ROS中控制Velodyne 在之前的文章中,我们构建的Velodyne传感器已经具……继续阅读 » 我是。 5年前 (2021-04-26) 2506浏览 0评论500个赞
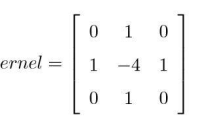
首先: Canny边缘检测:cv2.Canny() 任务1:原理 步骤1.1 噪音去除 由于边缘检测很容易受到噪音影响,所以第一……继续阅读 » Eragonl 5年前 (2021-04-26) 3076浏览 0评论1252个赞
一、概述 相关扩展 C/C++PythonCMakeCMake Toolsvsc……继续阅读 » white_Learner 5年前 (2021-04-26) 2309浏览 0评论2292个赞
ur机械臂 + robotiq gripper + robotiq ft sensor + gazebo + 连接真实机械臂 + 网页控制仓库地址:[ur_ws](https://github.com/borninfreedom/ur_……继续阅读 » bug404 5年前 (2021-04-26) 1794浏览 0评论1290个赞
6,视觉算法 这里我以OpenCv中的SIFT描述子检测目标物体相对于相机的位姿。这里有个开源的包。find_object_2d是ROS平台下一个功能强大的识别物体的功能包。由于对于纯颜色物体具有很少的特征,所以我决定把另外两个物快……继续阅读 » 光头明明 5年前 (2021-04-26) 2934浏览 0评论761个赞
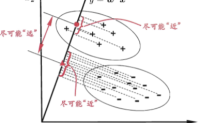
线性判别分析,英文名称Linear Discriminant Analysis(LDA)是一种经典的线性学习方法。本文针对二分类问题,从直观理解,对其数学建模,之后模型求解,再拓展到多分类问题。 ……继续阅读 » 小小何先生 5年前 (2021-04-26) 2332浏览 0评论1333个赞
这一节我们介绍线性模型,介绍思路如下:我们先介绍概念,什么叫做线性模型?在了解了基本的线性模型之后,我们将其应用于一元线性回归,之后扩展到多元线性回归。之后我们再将其扩展到广义线性模型……继续阅读 » 小小何先生 5年前 (2021-04-26) 2068浏览 0评论1399个赞
结论: 相比于老的ur5_bringup.launch来控制机械臂可以更加柔顺的控制UR5机械臂。但是也存在规划时出现失败的情况,需要多次plan。具体怎么柔顺我会具体说明一下: 那末怎么使用呢? ……继续阅读 » 光头明明 5年前 (2021-04-26) 1995浏览 0评论2744个赞