前言 前一篇中对自抗扰控制算法的原理及扩张状态观测器的参数整定问题进行了详解。同时,提出了一种基于自抗扰控制算法的多旋翼飞行器控制系统设计方案。 在系统辨识专题中,我们提到了控制效率方程的作用及重要性。 <……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 1717浏览 0评论930个赞
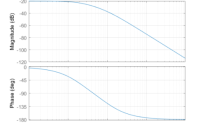
文章目录 Matlab 仿真——直流电机速度控制(5)通过频域分析进行控制器设计……继续阅读 » chuchu 5年前 (2021-04-26) 1923浏览 0评论160个赞
进入课题组的初期,老师分配了一个实际项目,下面写一下搭的项目的大致框架及其心得感悟,因为现在已经越发浮躁,想踏下心来好好做一些回顾一下自己的新手上路。需要准备材料:apriltags下tag标签,usb摄像头,标定板,ur5(也可以用gazebo模型代替) 大致流程……继续阅读 » 光头明明 5年前 (2021-04-26) 2688浏览 0评论407个赞
A*算法作为路径规划算法中应用最广泛实用的算法,由于A*算法的算法原理较为简单,网络上能够找到各种各样的学习资料,本文仅对其实现过程进行总结,同时,附上matlab仿真源码及结果图供参考学习。 算法实现过程 A*算法作为一种启发式的……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 2403浏览 0评论2931个赞
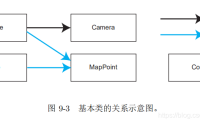
视觉SLAM学习【5】—–ubuntu16.04上基于KDevelop的VO框架搭建及特征提取与匹配目录 一、VO框架简……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 1875浏览 0评论1920个赞
安装webots并且配置和ROS之间的环境 注意: 再学习本系列教程时,应该已……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 2356浏览 0评论2254个赞
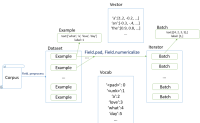
任务说明:NLP-Beginner:自然语言处理入门练习 任务二 数据下载:……继续阅读 » 喵木木 5年前 (2021-04-26) 2040浏览 0评论1343个赞
文章目录 PAC学习模型……继续阅读 » 小小何先生 5年前 (2021-04-26) 2701浏览 0评论1711个赞
在webots中搭建双轮差速机器人 注意: 再学习本系列教程时,应……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 3714浏览 0评论651个赞
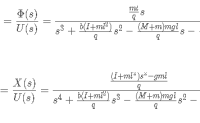
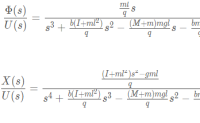
文章目录 1. 受控对象与设计要求2. 力分析与系……继续阅读 » chuchu 5年前 (2021-04-26) 1712浏览 0评论592个赞
现在做无人车和其他种类机器人的公司或者研究机构,很多用的ROS系统。原因在于其信息传递快捷方便,且要求开发者以模块化的方式设计程序,使得工程容易管理和重构,优势明显。 最近因为所在单位需要,也开始研究ROS系统了,因此循着学习的脉络做下记……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 1735浏览 0评论2163个赞
主要参考网址:https://blog.csdn.net/harrycomeon/article/details/90451692 <……继续阅读 » 光头明明 5年前 (2021-04-26) 2082浏览 0评论1217个赞
更多创客作品,请关注笔者网站园丁鸟,搜集全球极具创意,且有价值的创客作品 ROS机器人知识请关注,……继续阅读 » DiegoRobot 5年前 (2021-04-26) 3343浏览 0评论281个赞
视觉SLAM学习【6】—–基于python的SIFT和ORB特征点提取及匹配的对比探索目录 一、python终端安装需要的图像处理库1、……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 2744浏览 0评论2437个赞
这是……继续阅读 » bug404 5年前 (2021-04-26) 3060浏览 0评论1895个赞
在webots中使用ROS控制小机器人 注意: 再学习……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 2080浏览 0评论2800个赞
参考网址:https://industrial-training-……继续阅读 » 光头明明 5年前 (2021-04-26) 2008浏览 0评论1252个赞
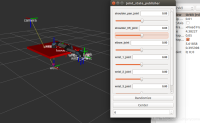
创建ROS包,包名redwall_arm ,通过自定义的消息,将手柄的数据发布 msg/ joycontrol.msg,内容如下,分别对应罗技手柄的按钮和遥杆轴。 i……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2539浏览 0评论1744个赞
视觉SLAM学习【7】—–基于ubuntu16.04的深度及彩色图像立体匹配,并生成深度和彩色3D点云目录 一、数据准备和库的安装及配置 <……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 1799浏览 0评论2480个赞
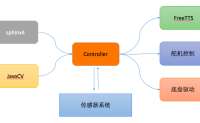
主控板主要提供智能数据分析,根据分析的结果通过串口发送控制命令给小车驱动板,小车驱动板根据控制命令控制小车的动作,主控板采用Java平台,集成相关领域的开源解决方案,软件系统主要包括如下: ……继续阅读 » DiegoRobot 5年前 (2021-04-26) 2520浏览 0评论1753个赞
文章目录 0. 受控对象与设计要求0.1 受控对象……继续阅读 » chuchu 5年前 (2021-04-26) 2554浏览 0评论2236个赞
这一块自己参照以下网址配置 https://i……继续阅读 » 光头明明 5年前 (2021-04-26) 3405浏览 0评论777个赞
更多创客作品,请关注笔者网站园丁鸟,搜集全球极具创意,且有价值的创客作品 ROS机器人知识请关注,……继续阅读 » DiegoRobot 5年前 (2021-04-26) 1631浏览 0评论2294个赞
###### gazebo配合rviz 仿真机械臂 ####### 一旦机器人有超过6个关节,逆向运动学函数不唯一,可能存在多个解,逆向运动学很难,需要ROS中的逆向运动学包的使用,简化成矩阵的运算对于机械臂而言,需要的是能操作follow_joi……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2708浏览 0评论2195个赞
笔者设备:北通 阿修罗 一共有14个按钮和4个线性杆 1. 使用外接手柄控制小机器人 ……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 2264浏览 0评论298个赞
python人脸识别—–基于Ubuntu16.04的dlib+python3实现人脸识别及摄像头人脸检测目录 一、ski……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 3049浏览 0评论944个赞
文章目录 0. 受控对象与设计要求0.1 受控对象……继续阅读 » chuchu 5年前 (2021-04-26) 1907浏览 0评论2411个赞
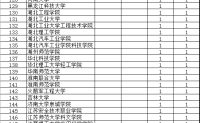
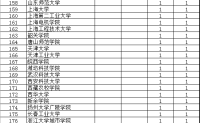
一,第十三届全国大学生智能汽车竞赛获奖名单……继续阅读 » 古月居官方 5年前 (2021-04-26) 2166浏览 0评论2108个赞
……继续阅读 » 古月居官方 5年前 (2021-04-26) 3175浏览 0评论1093个赞
第十五届全国大学生智能汽车竞赛各分赛区国赛获奖信息1.东北赛区<……继续阅读 » 古月居官方 5年前 (2021-04-26) 3934浏览 0评论573个赞
Python人脸微笑识别2–卷积神经网络进行模型训练目录 ……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 1536浏览 0评论2862个赞
更多创客作品,请关注笔者网站园丁鸟,搜集全球极具创意,且有价值的创客作品 ROS机器人知识请关注,diegorobot 业余时间完成的一款在线统计过程分析工具SPC,及SPC知识分享网站qdo……继续阅读 » DiegoRobot 5年前 (2021-04-26) 2242浏览 0评论2031个赞
在上一篇博客中,我们介绍了怎么创建一个ROS的最小系统,该系统包括工作空间、包和一个存放在包中的节点,然后我们让该节点打印“Hello ROS”。 在这一篇博客中,我们将……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 3370浏览 0评论2419个赞
××××××××××××××××××××××××××××××××××××× 8.15号更新 新的github链接:https://github.com/harrycomeon/Project1-Apriltags-UR5 由于直接采用myrobot的效果并不好,所以……继续阅读 » 光头明明 5年前 (2021-04-26) 2523浏览 0评论297个赞
文章目录 0. 受控对象与设计要求0.1 受控对象……继续阅读 » chuchu 5年前 (2021-04-26) 3090浏览 0评论396个赞
在webots中使用激光雷达 注意: 再学习本系列教程时,应该已经安装过……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 2753浏览 0评论1756个赞
首先说明一下,这里我们的摄像头和tag只是利用了他们的相对位姿,并没有按照实际模型那样布置摄像头和tag,但这并不影响我们观察整个系统的运行效果,布置如下: ……继续阅读 » 光头明明 5年前 (2021-04-26) 1859浏览 0评论2465个赞
导航功能包入门1 注意: 再学习本系列教程时,应该已经安装过ROS了并且需要有一些ROS的基本知……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 3068浏览 0评论2086个赞
[Python图像处理]一 :Opencv-python的简介及环境搭建 一、为什么选择opencv-python1……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 1588浏览 0评论972个赞
更多创客作品,请关注笔者网站园丁鸟,搜集全球极具创意,且有价值的创客作品 ROS机器人知识请关注,diegorobot 业余时间完成的一款在线统计过程分析工具SPC,及SPC知识分享网站qdo……继续阅读 » DiegoRobot 5年前 (2021-04-26) 1993浏览 0评论1924个赞
上一篇文章我们介绍了ros最小话题系统的制作,本篇将进一步介绍ROS的另一种节点间的交互形式—服务 首先,什么是服务? ……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 1996浏览 0评论537个赞
1.什么是URDF? URDF全称(United Robotics Description Format)统一机器人描述格式,是一个XML语法框架下用来描述机器人的语言格式,URDF在ROS界很流行。我们可以 ……继续阅读 » chuchu 5年前 (2021-04-26) 3056浏览 0评论1486个赞
OMPL能做什么? 简单说,就是提供一个运动轨迹。给定一个机器人结构(假设有N个关节),给定一个目标(比如终端移到xyz),给定一个环境,那么OMPL会提供给你一个 轨迹,也就是一个完整的关节位置。沿着这个轨迹依次移动关节,就可以最终把终端移到xyz,当然,……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3225浏览 0评论1512个赞
导航功能包入门2 注意: 再学习本系列教程时,应该已经安装过ROS了并且需要有一些ROS的基本知……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 2935浏览 0评论647个赞
在机器人系统中,视觉是非常重要的一部分(人的眼睛获取信息占全部信息的78%,机器人可以类比下)。因此,用前面四篇文章打下些许基础后,本人便迫不及待的想学习怎么在ROS上用上OpenCV视觉库。 ……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 2441浏览 0评论2138个赞