Matlab 仿真——直流电机速度控制(4)通过根轨迹法进行控制器设计
1. 受控对象与设计要求
受控对象
%motor parameter
J = 0.01;
b = 0.1;
K = 0.01;
R = 1;
L = 0.5;
%motor tf function
s = tf('s');
P_motor = K/((J*s+b)*(L*s+R)+K^2)设计需求(阶跃响应):
- 稳定时间<2s
- 超调<5%
- 稳态误差<1%
2.画出根轨迹
根轨迹设计的主要思想是根据根轨迹图预测闭环响应,该图描绘了可能的闭环极点位置。然后,通过控制器添加零和/或极点,可以修改根轨迹,以实现所需的闭环响应。 本节我们使用Control system designer工具箱来协助我们进行根轨迹分析与控制器设计。 运行以下代码绘制根轨迹图
%motor parameter
J = 0.01;
b = 0.1;
K = 0.01;
R = 1;
L = 0.5;
%motor tf function
s = tf('s');
P_motor = K/((J*s+b)*(L*s+R)+K^2)
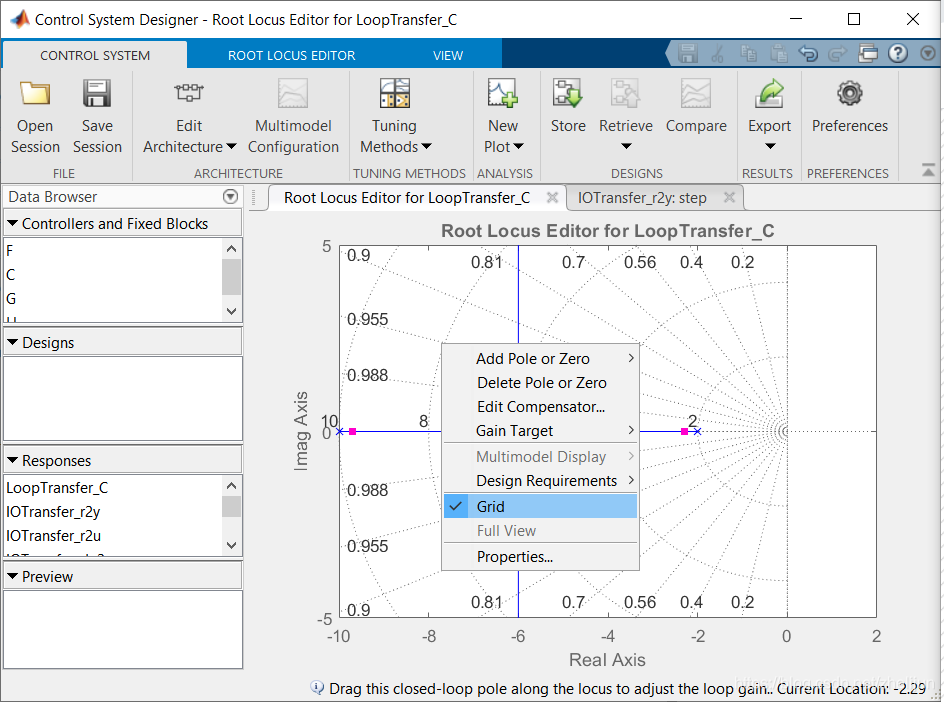
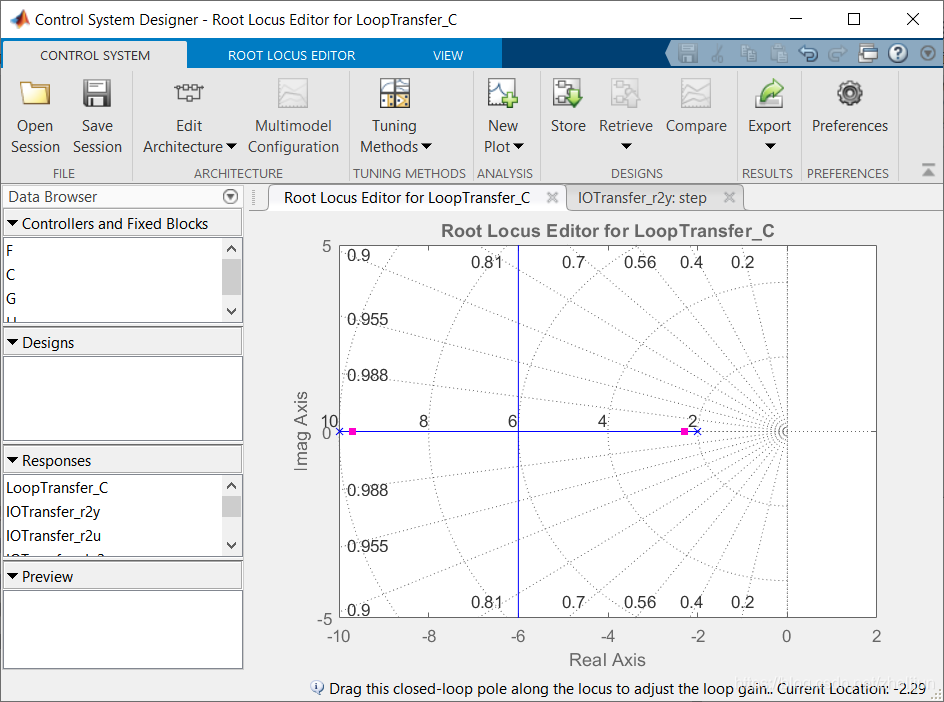
controlSystemDesigner('rlocus', P_motor) 运行结果(通过右击图像,选择Grid选项以打开网格显示)
3.确定增益K
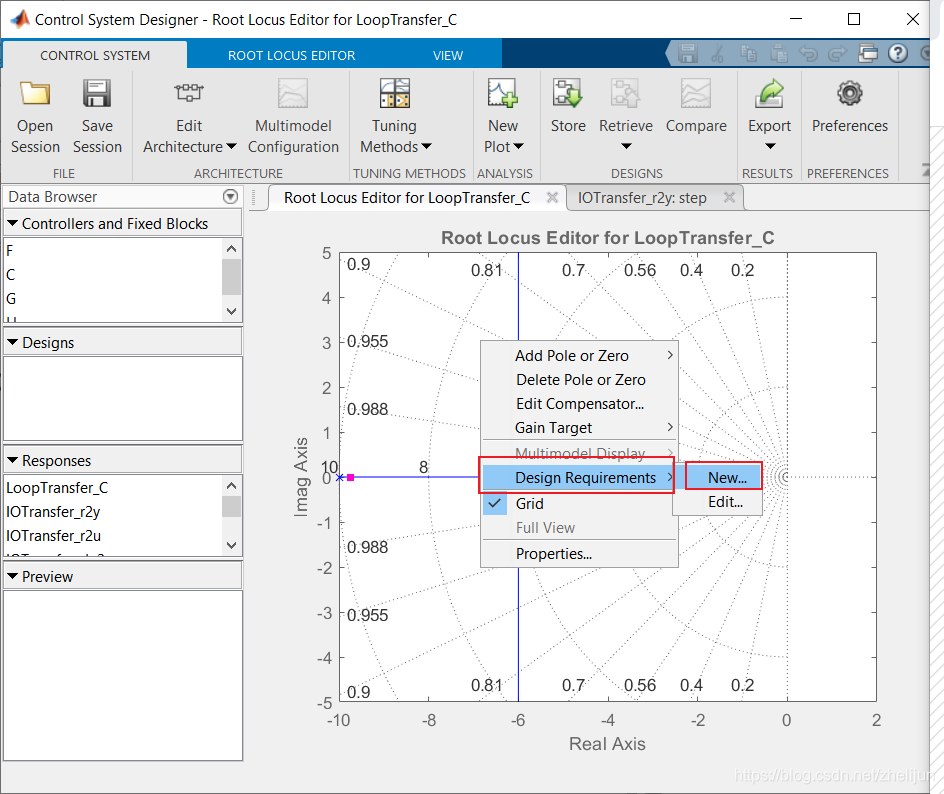
Control system designer工具箱方便我们把时域上的设计要求转换成根轨迹的区域,现在我们试着把我们的设计要求添加进根轨迹图里面 1.右击图像,选择添加设计需求
 2.设置Setting time小于两秒,然后点击OK
2.设置Setting time小于两秒,然后点击OK

 3.接着再加上超调的设计要求
3.接着再加上超调的设计要求
 上图白色区域就是满足超调和稳定时间条件的所有极点位置。通过鼠标点击粉色方块并拖动它,我们可以找到新的根位置。松手之后响应的阶跃响应图像也会随之更新。我们把极点拖到大概6±2i的位置,然后切换到阶跃响应图像,观察新系统的性能。
上图白色区域就是满足超调和稳定时间条件的所有极点位置。通过鼠标点击粉色方块并拖动它,我们可以找到新的根位置。松手之后响应的阶跃响应图像也会随之更新。我们把极点拖到大概6±2i的位置,然后切换到阶跃响应图像,观察新系统的性能。
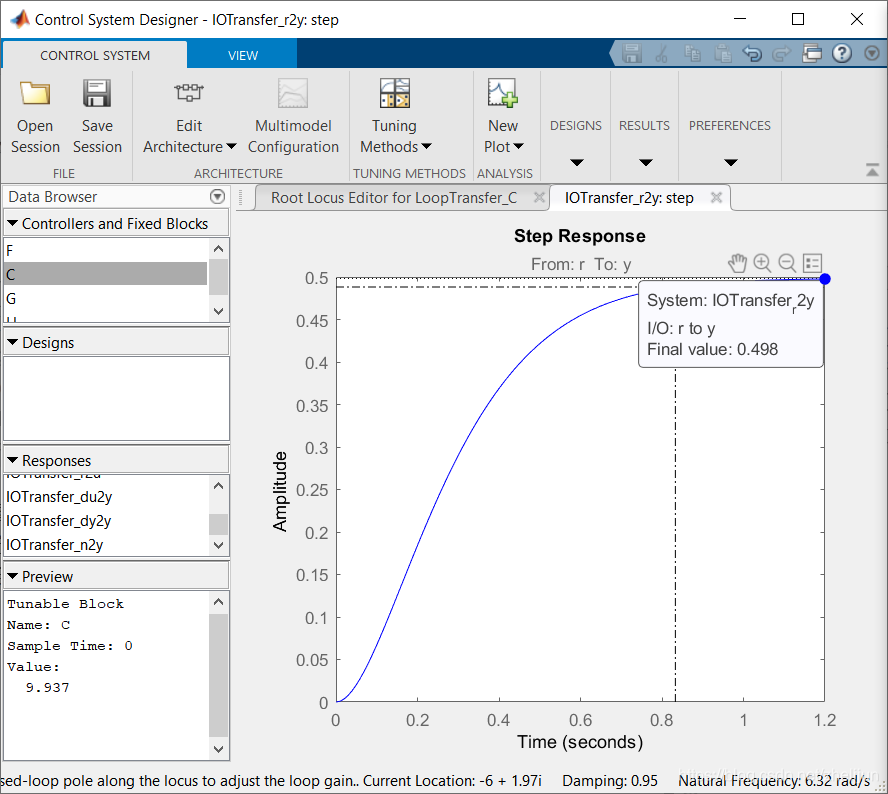 新系统的超调和稳定时间都能满足要求,但是稳态误差很大。因此需要加一个lag controller来补偿稳态误差。
新系统的超调和稳定时间都能满足要求,但是稳态误差很大。因此需要加一个lag controller来补偿稳态误差。
4.设计Lag controller
Lead compensator通常用来使系统稳定,而Lag compensator通常用来补偿系统的稳态误差。这里显然需要一个Lad compensator。我们试着添加如下的Lag 补偿器(这里为什么这么设计我们没有涉及,直接给出了结论)
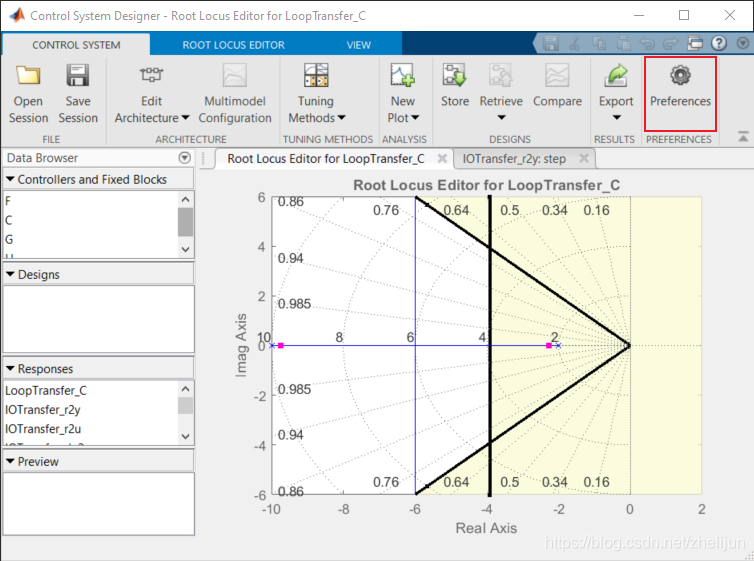
通过根轨迹法进行控制器设计") 利用Control System Designer工具箱可以很方便地添加Lag补偿器 4.1 点击Perference
利用Control System Designer工具箱可以很方便地添加Lag补偿器 4.1 点击Perference
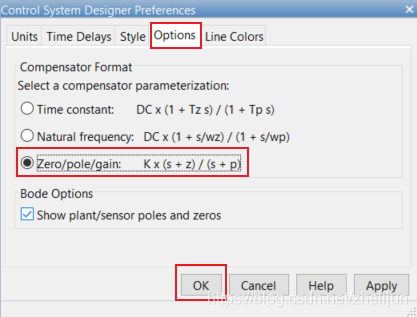
 4.2 点击Options, 选择Zero/pole/gain: , 点击OK
4.2 点击Options, 选择Zero/pole/gain: , 点击OK
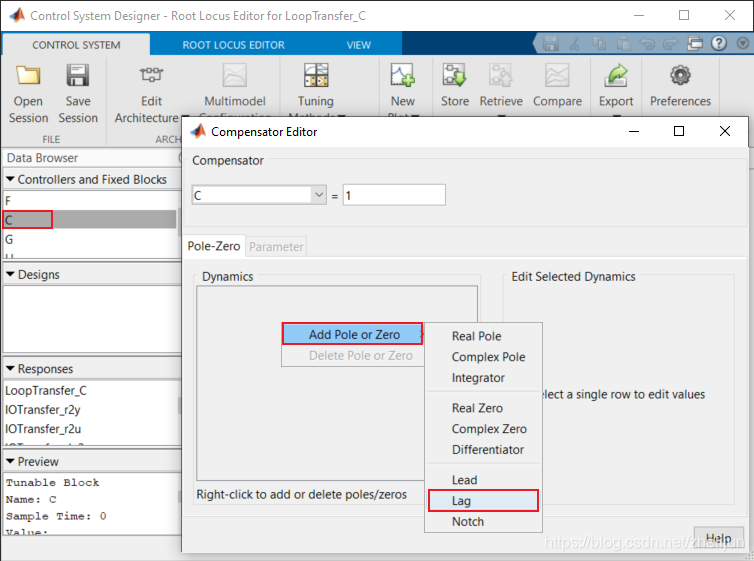
 4.3 双击左边Controllers and Fixed Blocks 里面的C,会打开控制器编辑窗口,我们右键单击Dynamics窗口,然后选择Add Pole and Zero,选择添加Lag 补偿器
4.3 双击左边Controllers and Fixed Blocks 里面的C,会打开控制器编辑窗口,我们右键单击Dynamics窗口,然后选择Add Pole and Zero,选择添加Lag 补偿器
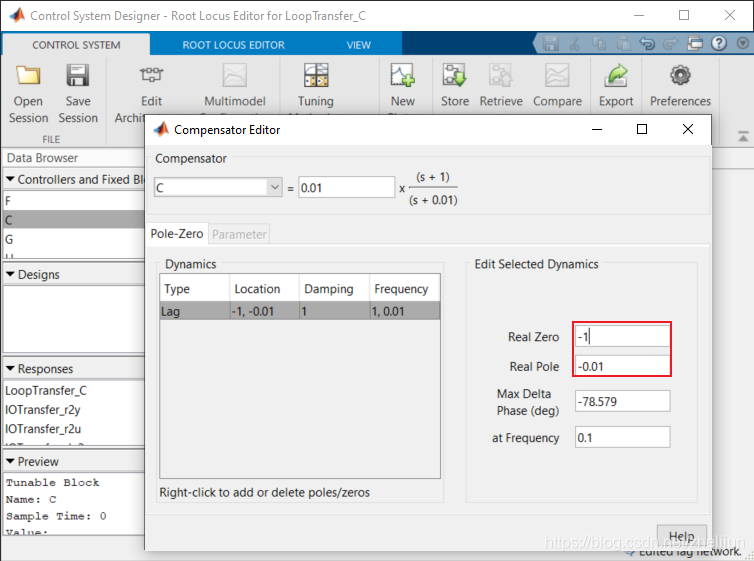
 4.4 配置零极点位置
4.4 配置零极点位置
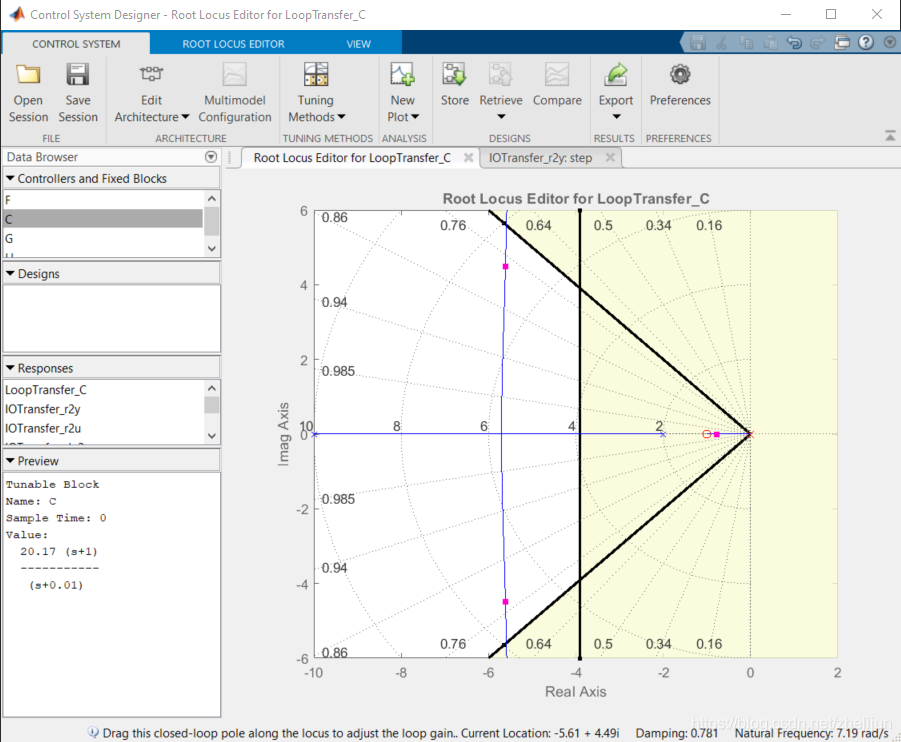
 关闭补偿器编辑窗口之后,根轨迹图也做了相应的更新。
关闭补偿器编辑窗口之后,根轨迹图也做了相应的更新。
5. 确定带有Lag补偿器的增益K
我们再一次拖动极点,到一个比较接近白色区域边界的位置
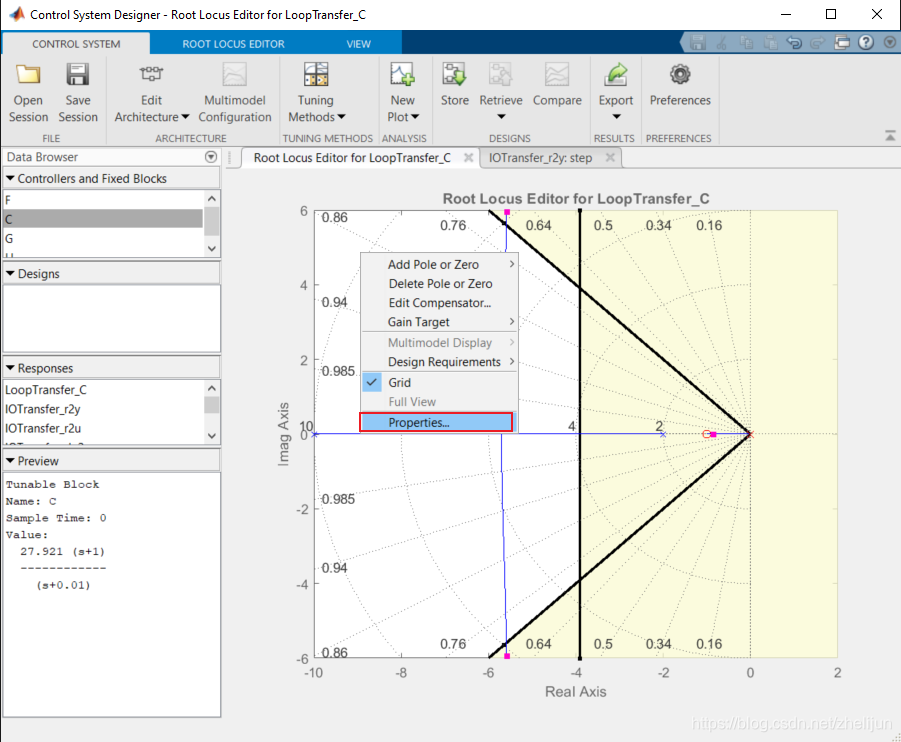
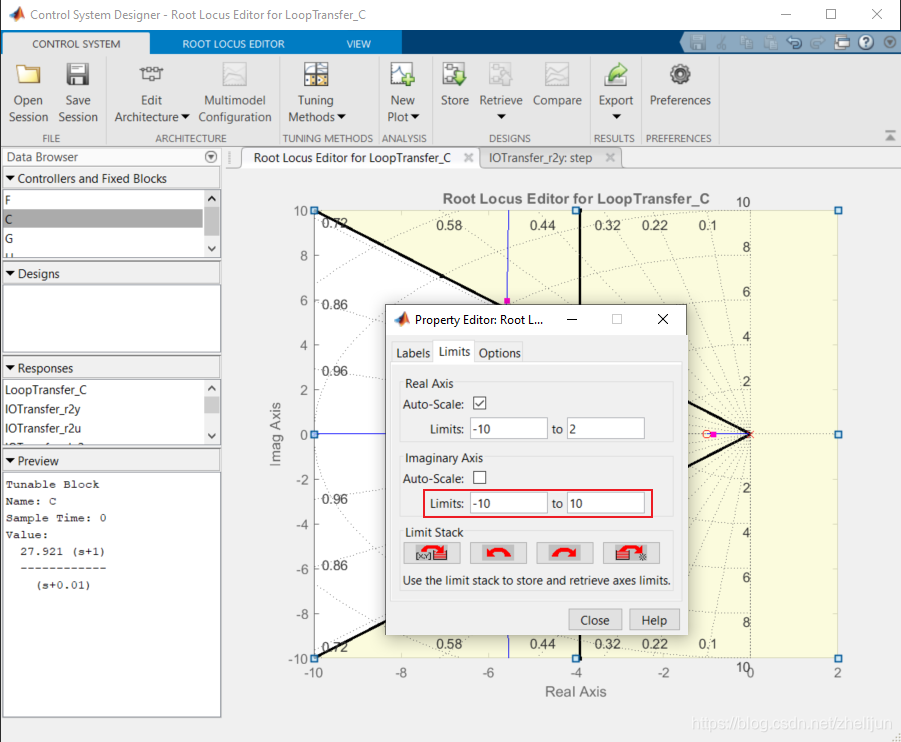
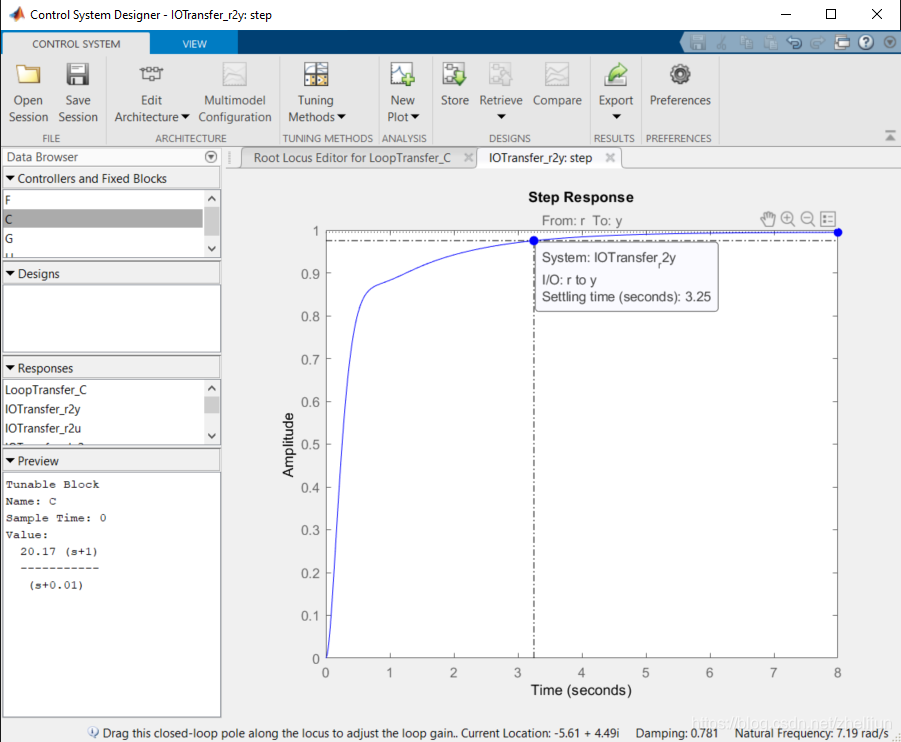 然后观察阶跃响应,发现这里的稳态误差已经很小了,但是稳定时间变得不满足要求。wait,what?我们之前不是说白色区域肯定会满足超调和稳定时间要求吗?原因很简单,加了Lag补偿器的新系统已经不具备标准二阶系统的形式了,因此不能用二阶系统划分根轨迹区域的方法来划分阴影和空白区域。更具体地来说,观察根轨迹图我们发现第三个极点在很接近虚轴的位置。该极点一方面拖慢了系统的收敛(所以不满足稳定时间要求),另一方面因为它很好的衰减,所以对于新系统的超调被有所减小,因此能满足超调要求。 综上所述,对于新的系统,我们可以脱离划分的阴影区域带来的限制。我们进一步地提高增益K,看看系统怎么响应。由于图像只显示了一部分,我们调整一下虚轴的上下限 5.1 调整图像
然后观察阶跃响应,发现这里的稳态误差已经很小了,但是稳定时间变得不满足要求。wait,what?我们之前不是说白色区域肯定会满足超调和稳定时间要求吗?原因很简单,加了Lag补偿器的新系统已经不具备标准二阶系统的形式了,因此不能用二阶系统划分根轨迹区域的方法来划分阴影和空白区域。更具体地来说,观察根轨迹图我们发现第三个极点在很接近虚轴的位置。该极点一方面拖慢了系统的收敛(所以不满足稳定时间要求),另一方面因为它很好的衰减,所以对于新系统的超调被有所减小,因此能满足超调要求。 综上所述,对于新的系统,我们可以脱离划分的阴影区域带来的限制。我们进一步地提高增益K,看看系统怎么响应。由于图像只显示了一部分,我们调整一下虚轴的上下限 5.1 调整图像
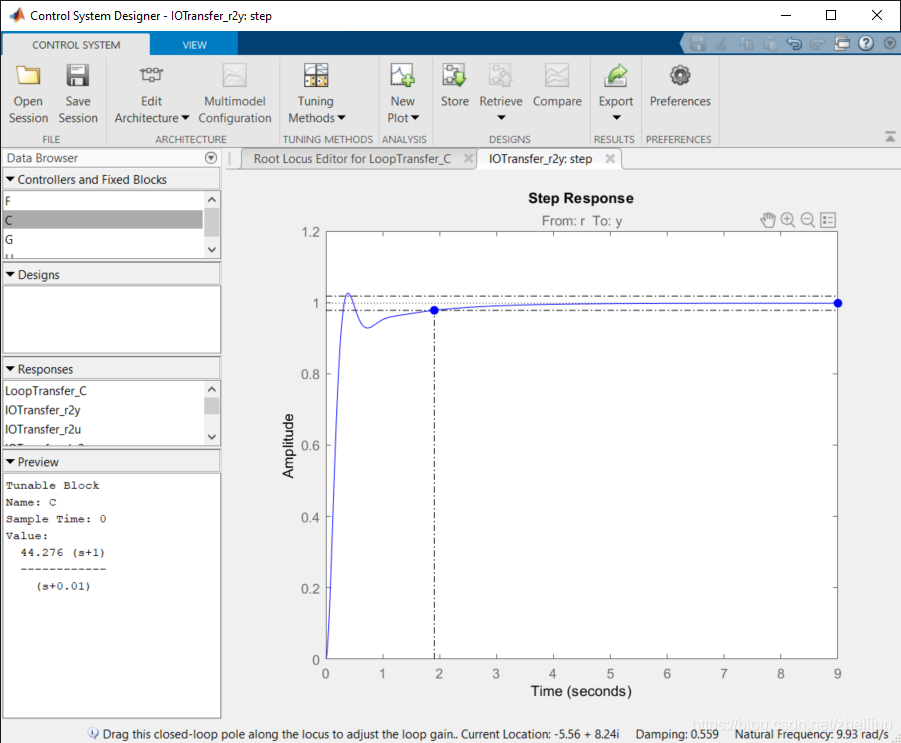
 5.2 进一步拖动极点,直到阶跃响应满足系统设计要求。 我们把极点拖到了新的位置,此时的增益为44.276
5.2 进一步拖动极点,直到阶跃响应满足系统设计要求。 我们把极点拖到了新的位置,此时的增益为44.276
 新的阶跃能满足系统设计要求,至此,根轨迹法的控制器设计过程结束
新的阶跃能满足系统设计要求,至此,根轨迹法的控制器设计过程结束