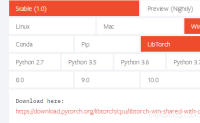
之前一直用Pytorch做的网络训练,最近想看看训练出来的模型在C++上的表现(毕竟稍微注重效率的工程都用的C++写),因此花了点时间研究了一波。 因为PyTorch的Python版本和C++版本使用的文件描述有区别,因此需要先把Python版本训练的模型转换成To……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 2710浏览 0评论2087个赞
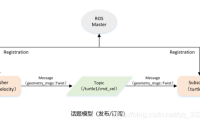
ROS是一种分布式软件框架,节点之间通过松耦合的方式进行组合,在很多应用场景下,节点可以运行在不同的计算平台上,通过Topic、Service进行通信。但是ROS中只允许存在一个Master,在多机系统中Master只……继续阅读 » 十啵 5年前 (2021-04-26) 2223浏览 0评论1683个赞
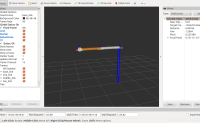
继上篇文章ROS: URDF自定义robot model —–解决WARN:No tf data. Actual error: Fixed Frame [base_link] does no……继续阅读 » bbtang5568 5年前 (2021-04-26) 3280浏览 0评论2492个赞
写在前面 2019浙江省的足球机器人小型组对抗赛是4V4的,然后目标就是……继续阅读 » better_coder 5年前 (2021-04-26) 2745浏览 0评论1442个赞
目录 1. 采样(sampling.py)2. 聚合(net.py)3. Grap……继续阅读 » 喵木木 5年前 (2021-04-26) 2210浏览 0评论691个赞
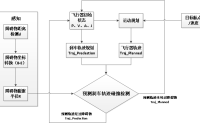
前言 上篇中介绍了基于稀疏点云传感器的常用避障规划算法,由于实际工程中受限于不同产品的技术成熟度、成本的因素的原因,不得不采用低成本的单点测距传感器进行避障。然而,避障作为无人机自动飞行必不可少的功能,设计一个健壮的避障规划器显得尤为……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 3066浏览 0评论262个赞
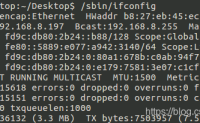
环境: (1)虚拟机本地端IP 192.168.10.30 (虚拟机需要通过桥接的形式与PC本地机连接, PC 机IP 192.168.10.21) (2)移动端 IP 192.168.10.11 1 配置本地环境变量 (1)打开 .bashrc <……继续阅读 » bbtang5568 5年前 (2021-04-26) 2280浏览 0评论1389个赞
我们已经在gazebo中实现了机器人的仿真,而且能够控制机器人的运动, 查看机器人所感知到的信息, 包括lasercan, 图像信息, 深度信息, 点云, 也包括没有提到的速度信息. 这里,我们建立用ROS navig……继续阅读 » 旧人赋荒年 5年前 (2021-04-26) 2632浏览 0评论988个赞
目录 1 软件包① 演示套装② 例子③ 性能测试工具……继续阅读 » 越来越胖了_mengleijin 5年前 (2021-04-26) 2328浏览 0评论866个赞
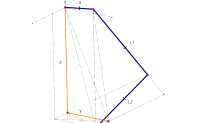
本篇将会对四足机器人的腿部进行数学建模,求解器正逆运动学解,包含详细公式推导与计算 一、运动学 不考虑横向髋关节运动时,四足机器人的腿……继续阅读 » 我是。 5年前 (2021-04-26) 2945浏览 0评论2019个赞
不久前PyTorch0.4.0官方支持了Windows,可谓是感天动地,于是乘比较空闲的时间搭搭环境,顺便做下记录。 ……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 3192浏览 0评论2213个赞
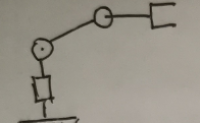
底层的电机控制已经基本完成,还需要解决的最后一个问题就是根据机械臂的运动,将机械臂的位姿状态信息发回到上位机的ROS,让RVIZ中的机械臂和现实中的机械臂保持一致。 目前没有反馈的信息发回到上位机,所以每当点击 Update ,然后Plan and Execute之……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2880浏览 0评论2852个赞
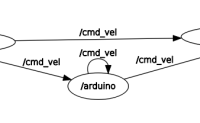
ros_arduino_brige功能包使用和安装这里就不多说了,详情点击 先看一下ros_arduino_b……继续阅读 » 十啵 5年前 (2021-04-26) 2818浏览 0评论2530个赞
以小海龟运动仿真为例: ……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 3049浏览 0评论1747个赞
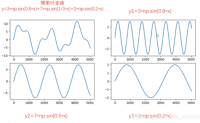
一、设计功能 录制音频,保存音频对录制的语音信号进行频谱分析,确定该段语音的主要频率范围;……继续阅读 » 挽风 5年前 (2021-04-26) 1964浏览 0评论1013个赞
URDF文件通过check_urdf pan_tilt.urdf检测是正确的: robot name is: pan_tilt---------- Success……继续阅读 » bbtang5568 5年前 (2021-04-26) 3507浏览 0评论945个赞
ROS常用命令: ……继续阅读 » 小小何先生 5年前 (2021-04-26) 2827浏览 0评论1285个赞
本篇将会对四足机器人的俯仰角进行数学建模,求解器正逆运动学解,包含详细公式推导与计算 一、数学建模 ……继续阅读 » 我是。 5年前 (2021-04-26) 1790浏览 0评论1667个赞
要建立自己的自主机器人,首先,必须要建立自己的机器人模型,URDF(Unified Robot Description Format)模型。 ……继续阅读 » 旧人赋荒年 5年前 (2021-04-26) 1690浏览 0评论456个赞
文章目录 ① 背景② 前提③ 任务 ……继续阅读 » 越来越胖了_mengleijin 5年前 (2021-04-26) 1957浏览 0评论2984个赞
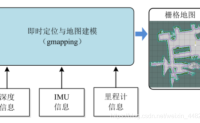
gmapping功能包集成了Rao-Blackwellized粒子滤波算法,为开发者隐去了复杂的内部实现。下图所示的是gmapping功能包的总体框架。 ……继续阅读 » 十啵 5年前 (2021-04-26) 1838浏览 0评论2333个赞
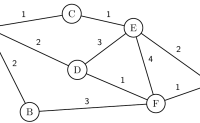
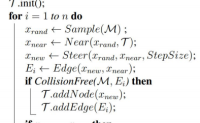
前言 在环境感知与规划专题(一)——A*算法入门一……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 3493浏览 0评论444个赞
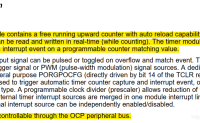
之前的博客为了实现延时特定时间(4ms)并在这段时间内产生PWM波形,使用了两种方法,第一种通过计数的方式,比较low;第二种使用PRU的工业级定时器IEP,时钟频率200MHZ,使用也很简单。 但是随着实验的进行,因为是六自由度的机械臂,计划使用三块beagleb……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 1863浏览 0评论2225个赞
前面一篇文章我们介绍了怎么在win10下搭建Yolo v3的开发环境。 ……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 2983浏览 0评论173个赞
本文我们分别用SDH法和MDH来给同一个机器人模型建模,感受一下两种建模方法在串联机械臂里面的应用。 所用平台:Matlab 本文重点是建系以及提取DH参数表的过程 想要运行程序只需要把所有代码复制粘贴进matlab运行即可 1. 机器人结构……继续阅读 » chuchu 5年前 (2021-04-26) 2469浏览 0评论2719个赞
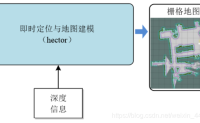
hector_slam功能包使用高斯牛顿方法,不需要里程计数据,只根据激光信息便可构建地图。 所以他的总体框架如下: ……继续阅读 » 十啵 5年前 (2021-04-26) 2493浏览 0评论2252个赞
本篇将会三维空间中,对四足机器人的腿部进行数学建模,求解器正逆运动学解,包含详细公式推导与计算 首先,我们来看三维空间中简图: ……继续阅读 » 我是。 5年前 (2021-04-26) 2489浏览 0评论2631个赞
笛卡尔运动规划Python接口https://blog.csdn.net/qq_32618327/article/details/999669……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2161浏览 0评论842个赞
1 异常报警:package ‘orocos-bfl’ not found: -- Found PkgConfig: /usr/bin/pkg-config (fou……继续阅读 » bbtang5568 5年前 (2021-04-26) 3405浏览 0评论116个赞
主要知识点: 1.src、build、devel、install各文件夹的功能介绍。 2.创建工作空间(创建文件夹,初始化工作空间)、编译工作空间、设置环境变量,检查环境变量 (echo $ROS_PACKAGE_PATH) 3.创建功能包:cat……继续阅读 » 小小何先生 5年前 (2021-04-26) 2065浏览 0评论2650个赞
本专栏主要介绍如果通过OpenCv-Python进行图像处理,通过原理理解OpenCv-Python的函数处理原型,在具体情况中,针对不同的图像进行不同等级的、不同方法的处理,以达到对图像进行去噪、锐化等一系列的操作。同时,希望观看本专栏的小伙伴可以理解到OpenCv进行图像处理……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 3347浏览 0评论1828个赞
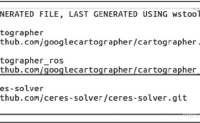
2016年10月5日,谷歌宣布开放一个名为cartographer的即时定位与地图建模库,开发人员可以使用该库实现机器人在二维或三维条件下的定位及建图功能。cartograhper的设计目的是在计算资源有限的情况下,实时获取相对较高精度的2D地图。考虑到基于模拟策略的粒子滤波方法……继续阅读 » 十啵 5年前 (2021-04-26) 1984浏览 0评论1483个赞
话题模型 ……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 1892浏览 0评论1483个赞
从正面观看我们的四足机器人时,可以简化成以下几何图形,接下来我们就根据该模型来分析四足机器人的滚转角调节 一、几何模型 ……继续阅读 » 我是。 5年前 (2021-04-26) 2139浏览 0评论227个赞
视觉抓取中非常重要的一个部分就是对抓取物体的识别,无论是二维图像还是三维点云,在ROS中都可以找到对应的功能包,https://blog.c……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2106浏览 0评论1625个赞
写在前面 上一小节我们介绍了机器人的舵机驱动与串口通讯的原理。到目前为止,我们已经完成了: 机器人编码器和轮胎的驱动机器人头部舵机的驱动< ……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 1881浏览 0评论1002个赞
1.首先 ……继续阅读 » Eragonl 5年前 (2021-04-26) 2552浏览 0评论2881个赞
开头 ……继续阅读 » Eragonl 5年前 (2021-04-26) 1528浏览 0评论219个赞
ROS-moveit!探索(4)webots和m……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 3220浏览 0评论2517个赞
ROS-moveit!探索(3)webots和movei……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 2554浏览 0评论2653个赞
这个是我用来看EMQ服务器里面数据的工具,MQTTX,挺好……继续阅读 » better_coder 5年前 (2021-04-26) 2956浏览 0评论1385个赞
一、前言 “纸上得来终觉浅,绝知此事要躬行”。ROS真的有一定难度,只让它“跑”起来就得记很多的指令,看很多的文档,更别说研究它了。这个测试很早……继续阅读 » 两钞票 5年前 (2021-04-26) 3499浏览 0评论158个赞
写在前面 2020年电赛结束了,因为疫情的原因,今年的电赛也推迟了,所以我先参加了智能车竞赛再参加的电子设计竞赛。准备时间不是很充分,就准备了一个国庆的时间,因此我们准备的小车就是智能车的舵机和电机,为了符合比赛要求,底板是我们重新打的,然后……继续阅读 » better_coder 5年前 (2021-04-26) 3371浏览 0评论1272个赞
首先 ……继续阅读 » Eragonl 5年前 (2021-04-26) 1633浏览 0评论2301个赞
首先 ……继续阅读 » Eragonl 5年前 (2021-04-26) 1808浏览 0评论381个赞


![[ros2学习]-Awesome Robot Operating System2](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20200329153109520.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dlaXhpbl8zNjYyODc3OA==,size_16,color_FFFFFF,t_70&h=123&w=200&q=90&zc=1&ct=1)





![[ros2学习]-CLI Tools – 了解ROS 2服务(service)](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20200402161210734.gif#pic_center&h=123&w=200&q=90&zc=1&ct=1)







![[OpenCV]经典霍夫变换原理](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=/Uploads/old-md/uploads/20210207_17802.gif&h=123&w=200&q=90&zc=1&ct=1)
![ROS-moveit!探索(4)webots和moveit联合控制[2]](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=/Uploads/old-md/uploads/20210210_77079.jpg&h=123&w=200&q=90&zc=1&ct=1)


![[OpenCV]时间中值滤波](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=/Uploads/old-md/uploads/20210209_52249.png&h=123&w=200&q=90&zc=1&ct=1)
![[OpenCV]特征对齐](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=/Uploads/old-md/uploads/20210211_96404.png&h=123&w=200&q=90&zc=1&ct=1)