参数模型 ……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 1875浏览 0评论1891个赞
机械臂的逆动力学问题可以认为是:已知机械臂各个连杆的关节的运动(关节位移、关节速度和关节加速度),求产生这个加速度响应所需要的力/力矩。KDL提供了两个求解逆动力学的求解器,其中一个是牛顿欧拉法,这个方法是最简单和高效的方法。 牛顿欧拉法算法可以分为三个步骤: st……继续阅读 » gpeng832 5年前 (2021-04-26) 2373浏览 0评论167个赞
目录十六届智能车基础四轮组路标:电感 or 摄像头?十六届智能车基础四轮组路标:普通赛道元素的电感信号感知……继续阅读 » better_coder 5年前 (2021-04-26) 1955浏览 0评论767个赞
简介 随着人工智能技术的迅速发展,移动机器人导航在拥挤的行人环境中有许多重要的应用,如医院、商场和食堂。在这些人群密集的场景中,安……继续阅读 » 柯南404 5年前 (2021-04-26) 2317浏览 0评论712个赞
时间:2020年4月9日 对之前内容做补充,加入支撑相轨迹规划,并构造完整的的周期曲线 在四足机器人的研究中,有一个很关键的问题,就是如何减少足端在触地瞬间的冲击,避免把机器人把自己给蹬倒了?这时候就需要一个合……继续阅读 » 我是。 5年前 (2021-04-26) 3641浏览 0评论2139个赞
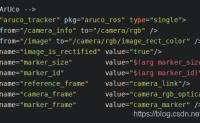
aruco是一种类似二维码的定位标记辅助工具,通过在环境中部署Markers,可以辅助机器人进行定位,弥补单一传感器的缺陷,纠正误差。在之前的手眼标定easy_handeye程序中,需要使用这个工具进行手眼标定。正好手上有realsense深度相机,就根据资料进行了简单的测试。如……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2734浏览 0评论1508个赞
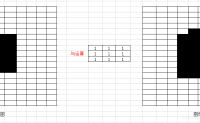
本专栏主要介绍如果通过OpenCv-Python进行图像处理,通过原理理解OpenCv-Python的函数处理原型,在具体情况中,针对不同的图像进行不同等级的、不同方法的处理,以达到对图像进行去噪、锐化等一系列的操作。同时,希望观看本专栏的小伙伴可以理解到OpenCv进行图像处理……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 2043浏览 0评论307个赞
文章目录 ① 背景② 前提③ 任务 ……继续阅读 » 越来越胖了_mengleijin 5年前 (2021-04-26) 2464浏览 0评论1946个赞
为了使创建的URDF机器人模型正确运动,必须给出robot_state_publisher 节点所需的sensor_msgs::JointState型topic:joint_states。可参见:……继续阅读 » bbtang5568 5年前 (2021-04-26) 3120浏览 0评论1910个赞
前言 ……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 2433浏览 0评论1446个赞
似然(likelihood)这个词其实和概率(probability)是差不多的意思,但是在统计里面,似然函数和概率函数却是两个不同的概念。 对于函数:……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 1789浏览 0评论2613个赞
0 背景 我们使用ROS开发时,希望当机器人上电以后,会自动启动一些传感器的驱动文件,定位导航,建图所需要的文件,并能按照我们的设定实现一定的功能,比如相应客户端的命令,并按照客户端的指令来动作,或者开机以后,自动对所在的环境进行建图和导航等。我们……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 2943浏览 0评论1197个赞
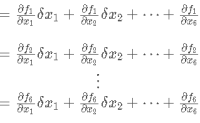
一、引入 假设有6个函数,每个函数有6个独立的变量,即: ……继续阅读 » 我是。 5年前 (2021-04-26) 3258浏览 0评论1585个赞
ROS中的图像数据。摄像头标定。ROS+Opencv应用实例(人脸识别、物体跟踪)。二维码识别。扩展内容:物体识别与机器学习。  ……继续阅读 » 小小何先生 5年前 (2021-04-26) 2561浏览 0评论792个赞
这篇文章试图说清楚两件事:1. 几何雅克比矩阵的本质;2. KDL如何求解机械臂的几何雅克比矩阵。 一、几何雅克比矩阵的本质 机械臂的关节空间的速度可以映射到执行器末端在操作空间的速度,这种映射可以通过一个矩阵来描述,……继续阅读 » gpeng832 5年前 (2021-04-26) 2968浏览 0评论2046个赞
题目有些啰嗦,到底说了个啥意思呢? 首先,是一个SlideBars控制,那啥是SlideBars控制呢? 就……继续阅读 » bug404 5年前 (2021-04-26) 1816浏览 0评论462个赞
题目翻译 概要……继续阅读 » better_coder 5年前 (2021-04-26) 3427浏览 0评论2632个赞
前言 目前课题上在做一些关于异构多机器人协同控制方面的工作(UAV + UGV),实验室里用的移动机器人为ROBOTIS公司的Tu……继续阅读 » 小黑鸭 5年前 (2021-04-26) 3078浏览 0评论1966个赞
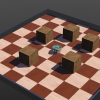
一、创建一个新的World 一个World是包含像对象是一个信息的文件,比如他们的样式,它们如何相互约束,天空是怎样的,重力是多少,摩擦力,物体的质量等。不同的对象称为“ 节点”,并在“ 场景树”中进行分层组织。因此,一个节点可能包含子节点。Wor……继续阅读 » 我是。 5年前 (2021-04-26) 2877浏览 0评论261个赞
对于机械臂视觉抓取功能来说,比较传统的做法:由于之前的物体识别模块已经确定了这片点云对应的物体,如果我们有物体的3D模型,便可以直接用ICP算法将这片点云与物体的3D模型对齐。既然知道3D模型的位姿那就好办了。之后就是各种抓取姿态生成、力封闭之类的东西了。其他方法:利用RCNN在……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3609浏览 0评论848个赞
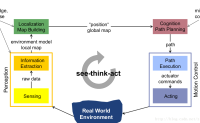
目前为止, 我们都旨在构建一个能够自主运行的机器人,这个就研究方向更加合理的名词应该叫自主移动机器人. 推荐一本个人觉得很不错的书 Ro……继续阅读 » 旧人赋荒年 5年前 (2021-04-26) 1962浏览 0评论1552个赞
环境:Ubuntu16.04 + ROS kinetic 安装joy package joy package为通用的Linux操纵杆提供了ROS驱动,它包括了一个joy_node节点,可以让Linux操纵杆和ROS交互……继续阅读 » 十啵 5年前 (2021-04-26) 1840浏览 0评论714个赞
文章目录 ① 背景② 前提③ 任务 ……继续阅读 » 越来越胖了_mengleijin 5年前 (2021-04-26) 2038浏览 0评论1308个赞
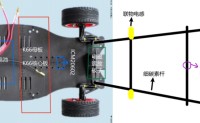
写在前面之前我已经写过了关于这个足球机器人4V4对抗赛的总思路,具体请看以下链接……继续阅读 » better_coder 5年前 (2021-04-26) 3594浏览 0评论809个赞
写在前面 上一节我们实现了基本的2D-SLAM导航包的使用。 本节我们将在2D-SLAM的基础上,通过手动遥控实现控制云台俯仰角来生成三维点云(如下图,视频还没上传可以在我朋友圈看)。 ……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 3004浏览 0评论1089个赞
介绍 现在,我们将编程一个简单的控制器,该控制器将使机器人向前移动。 ……继续阅读 » 我是。 5年前 (2021-04-26) 3522浏览 0评论1822个赞
前言 现在我们开始解决与编程机器人控制器有关的主题。我们将设计一个简单的控制器,避免前面教……继续阅读 » 我是。 5年前 (2021-04-26) 3791浏览 0评论1152个赞
本专栏主要介绍如果通过OpenCv-Python进行图像处理,通过原理理解OpenCv-Python的函数处理原型,在具体情况中,针对不同的图像进行不同等级的、不同方法的处理,以达到对图像进行去噪、锐化等一系列的操作。同时,希望观看本专栏的小伙伴可以理解到OpenCv进行图像处理……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 2625浏览 0评论2786个赞
QT rqt_console 收集日志信息,方便做筛选,调试 ……继续阅读 » nidie508 5年前 (2021-04-26) 4423浏览 0评论2524个赞
首先感谢实验课的助教工作,然我看到了学生们的热情以及大家的智慧。这是我在其中绘图机器人实验的基础上进行复现完成的一次demo演示。 ……继续阅读 » 光头明明 5年前 (2021-04-26) 3140浏览 0评论1592个赞
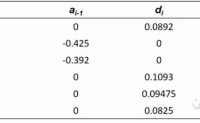
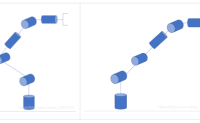
计算正向运动学通常需要使用D-H参数法对机械臂建模。 第一步: 绘制机械臂模型图 可用手绘机械臂结构简图或者模型图,使用圆柱体代表转动关节和线表示的连杆,当写论文的时候,可以使用PPT或者CAD来绘图,ppt里面提供了很多现成的线条形状,通过组合功能可以设计出很ni……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2001浏览 0评论1809个赞
1.加载待扩展的虚拟机->编辑虚拟机设置 ……继续阅读 » bbtang5568 5年前 (2021-04-26) 1580浏览 0评论951个赞
本文的内容是对另一篇文章(链接)的补充,对Trajectory_example.cpp涉及到的原理作一些简单的讲解,主要内容是: (1)机器人路径规划圆弧过渡的原理;……继续阅读 » gpeng832 5年前 (2021-04-26) 2614浏览 0评论2826个赞
此教程以webots_demo为基础……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 3181浏览 0评论1636个赞
本专栏主要介绍如果通过OpenCv-Python进行图像处理,通过原理理解OpenCv-Python的函数处理原型,在具体情况中,针对不同的图像进行不同等级的、不同方法的处理,以达到对图像进行去噪、锐化等一系列的操作。同时,希望观看本专栏的小伙伴可以理解到OpenCv进行图像处理……继续阅读 » 陈一月的编程岁月 5年前 (2021-04-26) 3221浏览 0评论2088个赞
上一篇文章我们已经了解了似然函数是什么,但怎么去把里面的……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 2099浏览 0评论732个赞
一、MPC的力学原理 刚体的力与加速度,转矩与角加速度可以通过牛顿方程和欧拉方程求出: ……继续阅读 » 我是。 5年前 (2021-04-26) 2573浏览 0评论1031个赞
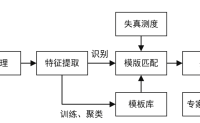
机器语音理论识别模型: ……继续阅读 » 小小何先生 5年前 (2021-04-26) 2586浏览 0评论1364个赞
使用eigen库进行空间变换 在三维空间中,常常需要变换当前机器人的位姿计算定义的绝对坐标系和当前机器人所处相对坐标系之间的关系。而主要的变换则是平移和旋转,有时候可能需要尺度变换,那么就可以描述为: &nb……继续阅读 » 旧人赋荒年 5年前 (2021-04-26) 3078浏览 0评论1088个赞
参考:http://wiki.ros.org/cn/ROS/Tutorials/CreatingMsgAndSrv 参考:http://wiki.ros.org/cn/ROS/Tutorials/WritingServiceClient%28c%2B%2B%29 要……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 2664浏览 0评论1742个赞
文章目录① 背景② 前提③ 任务Ⅰ准备Ⅱ 日……继续阅读 » 越来越胖了_mengleijin 5年前 (2021-04-26) 2277浏览 0评论661个赞
问题描述今天在上嵌入式课时候又学习到了新知识哈,美滋滋~ 情况是这样的,我在STM32F429上跑RT-Thread系统,因为rtt系统里面既有.cpp文件又有.c函数(kei……继续阅读 » better_coder 5年前 (2021-04-26) 2306浏览 0评论1032个赞
通过学习KDL开源项目的代码可以学习CMake构建程序的知识,现简单介绍一下orocos_kinematics_dynamics-master\orocos_kinematics_dynamics-master\orocos_kdl\examples\CMakeList.txt文……继续阅读 » gpeng832 5年前 (2021-04-26) 2744浏览 0评论1350个赞
PointCloud 点云处理方法总结(代码案例版) 本文将自己在点云处理过程中,遇到的一些常用的具体方法进行总结,不介绍点云数据处理的基本概念,主要是处理过程中的代码总结……继续阅读 » 旧人赋荒年 5年前 (2021-04-26) 3059浏览 0评论2095个赞
通常在机械臂腕部与末端夹持器之间安装六维力传感器,用于机器人在装配过程中的力反馈控制。六维力传感器能够测量三维空间中任何坐标系下的三维力 和三维力矩。 在机械臂处于静态时,机械臂腕部六维力传感器测出的力与力矩数据由三部……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3794浏览 0评论2648个赞




![[ros2学习]-CLI Tools – 了解ROS 2动作(action)](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=http://images.75271.com/Public/Uploads/2021-04-26/微信图片_20210220193504.png&h=123&w=200&q=90&zc=1&ct=1)







![[ros2学习]-CLI Tools – 创建启动文件(launch)](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20200402190414829.gif#pic_center&h=123&w=200&q=90&zc=1&ct=1)







![webots版本升级 webots 2021a 注意点[补写]](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=/Uploads/old-md/uploads/20210228_42739.png&h=123&w=200&q=90&zc=1&ct=1)



![[ros2学习]-CLI Tools – 使用rqt_console](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/2020040218271515.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dlaXhpbl8zNjYyODc3OA==,size_16,color_FFFFFF,t_70&h=123&w=200&q=90&zc=1&ct=1)