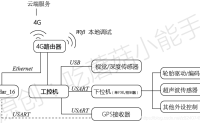
室外低速自动导航车的设计(1)——基础硬件配置 今天我们来开始做基于GPS和16线激光雷达的低速导航车项目。 因为不论做什么车,首先都要把硬件搭建起来,除了基础的机械机构(骨架和壳子)之外,基本的传感器,车轮的驱动器以及工控机都是要有的。 ……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 3396浏览 0评论1811个赞
代码是最为耐心、最能忍耐和最令人愉快的伙伴,在任何艰难困苦的时刻,它都不会抛弃你(开场白) 长时间不写博客,我总感觉自己没有做事情,最近一直在做目标检测,想结合一下双目视觉,做立体检测,于是就研究了一下双目视觉,参考了很多人的相关博客,在这里,特意表示感谢一下。 使用Opencv……继续阅读 » xiaorun 5年前 (2021-04-26) 2837浏览 0评论980个赞
Arduino智能小车系列教程4——调速篇 Arduino智能小车系列教程 ……继续阅读 » 懒小象 5年前 (2021-04-26) 1766浏览 0评论2969个赞
LOAM-Livox是针对livox-LiDAR的一个激光里程计和建图(LOAM)的功能包 Loam-Livox是一个适用于 Livox LiDAR 强大的、低漂移实时的里程计和建图功能包 Livox LiDAR……继续阅读 » 月照银海似蛟龙 5年前 (2021-04-26) 3242浏览 0评论1204个赞
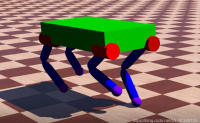
前言: 之前在Unity3D中尝试训练四足机器人学习奔跑前进,只是做了简单的尝试。在19年的寒假里由于要写论文,所以基于强化学习提出一种分层学习算法,实现四足机器人在腿瘸后仍可以继续向前运动。这种是一种比较简单的,所以也就只发表在国内的核心期刊上面。这也是我第……继续阅读 » JameScottX 5年前 (2021-04-26) 2731浏览 0评论1144个赞
Arduino智能小车系列教程4——超声波避障 Arduino智能小车系列教程 &nbs……继续阅读 » 懒小象 5年前 (2021-04-26) 1867浏览 0评论866个赞
前言 前段时间说到小编手里有两个传感器,6个激光雷达与摄像头,还有一个微波摄像头,分别装在一个路口的不同地方,需要将这些传感器进行融合输出目标列表。但是要做到融合首先第一步就是标定,做空间同步,第二是时间同步。 接下来我以激光雷达与摄像头为例,其中激光……继续阅读 » xiaorun 5年前 (2021-04-26) 3039浏览 0评论1899个赞
写在前面我最近在调试购物车的底盘,底盘上有一个光电传感器,是通过串口……继续阅读 » better_coder 5年前 (2021-04-26) 2616浏览 0评论2999个赞
前言 一个二维的 marker 通常有四个角点,如果把四个角点当做独立的三维特征点去参与BA优化,那么需要十二个参数,并且四个角点之间的约束(边长以及正交)还不好加入优化。这篇博客是将一个marker用6自由度的坐标系进行建模,推导了整个Marke……继续阅读 » 白巧克力亦唯心 5年前 (2021-04-26) 1657浏览 0评论1871个赞
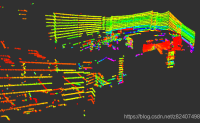
室外低速自动导航车的设计(2)——多线激光雷达的点云解析 我们在前面硬件系统的构建中通过网络接收到了多线激光雷达的原始数据,这些数据在空间中形成了一个个的点,每一个点都代表了某个物体表面的回波。我们采用的激光雷达是……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 3245浏览 0评论1968个赞
注意:本文下载的tensoflow/model版本比较旧,是18年的版本,现在github上有更新,对代码和文件结构进行了一定的优化,因此下文的流程使用起来可能会与最新版本有所差异,大家要根据官方介绍灵活设置 1 源代码测试……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 2813浏览 0评论2831个赞
首先,根据不同的雷达,了解雷达发布的点云消息。(IMU也是一样,了解IMU发布的点云topic)。 本文使用的是Robosense 16线激光雷达,暂时未使用IMU(建议6轴,再加上GPS定位精度会高很多)发布PointCloud2类型的消息默认的topic为rslidar_po……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 1642浏览 0评论1398个赞
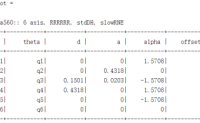
基于ROS-Serial和Arduino实现控制六轴舵机机械臂 &……继续阅读 » Rugels.Dix 5年前 (2021-04-26) 1931浏览 0评论1337个赞
Hi 小伙伴们,古月居新版本上线啦!本次大幅改版完善了界面的优化,并增加了一些新功能,小编已经迫不及待想和你们分享了~ ……继续阅读 » 古月居官方 5年前 (2021-04-26) 3098浏览 0评论1155个赞
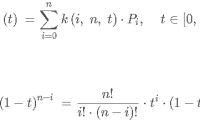
描述 使用贝塞尔曲线生成路径 已知:若干个二维路径点(x, y),生成一段由一系列(x, y)点组成的点集 公式 网上有很多贝塞尔曲线的概念和知识,这里不做赘述 ……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 3357浏览 0评论1450个赞
参考:ros::NodeHandle::advertiseServ……继续阅读 » bbtang5568 5年前 (2021-04-26) 3124浏览 0评论1279个赞
上一篇文章我们强力推导了GAN的数学公式,它就是: ……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 2766浏览 0评论132个赞
0x00 What’s STDR Simulator? ……继续阅读 » ROS小课堂 5年前 (2021-04-26) 1652浏览 0评论2867个赞
Arduino智能小车系列教程5——蓝牙小车 Arduino智能小车系列教程 < ……继续阅读 » 懒小象 5年前 (2021-04-26) 2358浏览 0评论2788个赞
检测或者训练有问题的可发邮件咨询小编,小编尽力解答1039463596@qq.com 好吧,正式开始跑程序(其实官网都有) 这篇文章是训练YOLO v2过程中的经验总结,我使用YOLO v2训练一组自己的数据,训练后的model,在阈值为.25的情况下,Recall值是95.54……继续阅读 » xiaorun 5年前 (2021-04-26) 2271浏览 0评论1621个赞
大概流程走完,其实还是有点懵逼的,下面就官方文档,讨论下细节,要是我自己没注意到的点。 Validate your bag 如果是准备跑自己的或者别人的bag包,这一步是很有必要的,可以从中获得相关消息的topic和frame_id,这个在填写lua文……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2352浏览 0评论2362个赞
Arduino智能小车系列教程6——循迹小车 Arduino智能小车系列教程 ……继续阅读 » 懒小象 5年前 (2021-04-26) 1496浏览 0评论2251个赞
前言 上一篇文章 “多机器人协同控制①——仿真……继续阅读 » 小黑鸭 5年前 (2021-04-26) 2912浏览 0评论1034个赞
目录 一、VIO(Visual-Inertial Odometry)概述……继续阅读 » 一抹烟霞 5年前 (2021-04-26) 2819浏览 0评论1664个赞
写在前面 上一节我们简单讨论了在生成点云的过程中的矩阵变换。如果大家看本章有点懵逼的话,不妨先看一下我上节写的内容。 我们本节将基于激光雷达与矩阵变换关系,将激光雷达的LaserScan数据转……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 2916浏览 0评论385个赞
Arduino智能小车系列教程7——小车测速 Arduino智能小车系列教程 ……继续阅读 » 懒小象 5年前 (2021-04-26) 2934浏览 0评论2412个赞
webots版本:2021aros版本:noetic……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 3343浏览 0评论1890个赞
1. 引言 1.……继续阅读 » hitgavin 5年前 (2021-04-26) 3093浏览 0评论1854个赞
一. 轨迹规划是什么? 在机器人导航过程中,如何控制机器人从A点移动到B点,通常称之为运动规划。运动规划一般又分为两步: 1、路径规划:在地图(栅格地图、四\八叉树、RRT地图等)中搜索一条从A点到B点的……继续阅读 » 一抹烟霞 5年前 (2021-04-26) 3078浏览 0评论1183个赞
在上一篇文章中,我们得到的轨迹并不是很好,与路径差别有点大,我们期望规划出的轨迹跟路径大致重合,而且不希望有打结的现象,而且希望轨迹中的速度和加速度不超过最大限幅值。为了解决这些问题有两种思路: 思路一:把这些”期望“加入到优化问题中。 思路二:调整时间分配,来避免……继续阅读 » 一抹烟霞 5年前 (2021-04-26) 2333浏览 0评论1596个赞
前几日有学弟问我,ros如何跟下位机通信呢? ……继续阅读 » nidie508 5年前 (2021-04-26) 1890浏览 0评论1990个赞
汇总 ……继续阅读 » 小黑鸭 5年前 (2021-04-26) 2556浏览 0评论1363个赞
汇总 ……继续阅读 » 小黑鸭 5年前 (2021-04-26) 2520浏览 0评论433个赞
在自动驾驶领域,激光里程计和建图(LOAM)已经起到重要的作用,归因于它可以在定位机器人的位姿的同时建立周围环境的高精度、高分辨率的地图。 ……继续阅读 » 月照银海似蛟龙 5年前 (2021-04-26) 2386浏览 0评论1724个赞
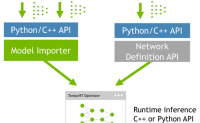
参考:https://arleyzhang.github.io/articles/7f4b25ce/ 1 什么是TensorRT 一般的深度学习项目,训练时为了加快速度,会使用多GPU分布式训练。但在部署推理时,为了降低成本,往往使……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 3065浏览 0评论2335个赞
目录 1. 工业机器人简介2. 国外机器人供应商2.1瑞典 ABB2.2 日本安川电机2.3 日本FANUC2.4 德国KUKA……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 2911浏览 0评论847个赞
利用python打开摄像头及颜色检测 最近两周由于忙于个人项目,一直未发言了,实在是太荒凉了。。。。,上周由于项目,见到Python的应用极为广泛,用起来也特别顺手,于是小编也开始着手学习Python,…下面我就汇报下今天的学习成果吧 ……继续阅读 » xiaorun 5年前 (2021-04-26) 2974浏览 0评论2944个赞
A*算法原理 A算法是一种经典的路径搜索算法,A算法的原理初学者可以去网上搜索算法原理详解,讲得很好链接:http://www.gamedev.net/reference/articles/article2003.a……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 2803浏览 0评论1969个赞
今天来学习一下英特尔D435深度传感器的相关内容: 首先,我们找到D435官网:https://www.intelrealsense.com/developers/ 我们打开一个终端,按照官网提示输入以下内容: 1)在软……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 1717浏览 0评论2301个赞
0x00 什么是仿真实验 在没有真实物理实体实验设备的情况下,通过在计算机上用软件模拟真实设备运行的效果,这就叫做软件仿真实验,用软……继续阅读 » ROS小课堂 5年前 (2021-04-26) 2536浏览 0评论1229个赞
……继续阅读 » 长风弦歌 5年前 (2021-04-26) 3386浏览 0评论2247个赞
飞思卡尔智能车—电磁循迹(节能组) 详细参赛要求请以智能车官方为准,此文章仅分享本人参赛经验,开源硬件电路设计,供大家学习! 电磁循迹部分设计思路:电感采集电磁信号,放……继续阅读 » 鲁棒最小二乘支持向量机 5年前 (2021-04-26) 2237浏览 0评论2377个赞
在上一篇中对 LOAM-Livox 算法做了整体的总结。 最后给出了 算法的整体框图 如下: ……继续阅读 » 月照银海似蛟龙 5年前 (2021-04-26) 3180浏览 0评论2034个赞
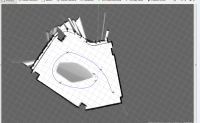
在很多商用机器人中都涉及到机器人与外部设备(比如APP)之间的交互。而在交互中,最为首要的就是地图与机器人位置的交互了。在这一个章节中,我们介绍一个机器人将内部的地图,机器人位置等数据与用户端进行同步的案例。 1. 实际场景与机器人(ROS)地图的对应关系……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 3088浏览 0评论2072个赞
……继续阅读 » 长风弦歌 5年前 (2021-04-26) 2711浏览 0评论2505个赞