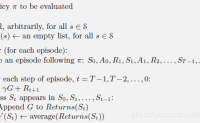
强化学习(四) – 蒙特卡洛方法(Monte Carlo Methods)及实例……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2741浏览 0评论1409个赞
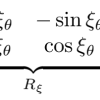
1 欧拉角概念百度百科:欧拉角,用来确定定点转动刚体位置的3个一组独立角参量,欧拉角由章动角θ、旋进角(即进动角)ψ和自转角Φ组成。欧拉角为欧拉首先提出而得名。维基百科:Euler angles,莱昂哈德·欧拉用欧拉角来描述刚……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2097浏览 0评论810个赞
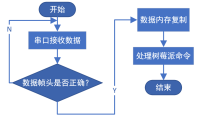
基于STM32F103的红外循迹避障小车设计红外循迹及红外避障实现较简单,无论是51单片机还是STM32单片机,其例程随处可见。但是完全可以运行的Proteus仿真,开源的并不多,更不要说基于STM32单片机的仿真。下面跟大家聊聊基于……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2408浏览 0评论1797个赞
写在前面……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2621浏览 0评论1701个赞
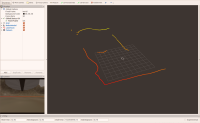
cartographer概述cartographerr是google推出的一套基于图优化的SLAM算法原文:W. Hess, D. Kohler, H. Rapp, and D. Andor, Real-Time Loop C……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2762浏览 0评论520个赞
前言: 近些年来足式机器人在国内外发展的非常火热,其中控制方法可以说是百花齐放,在MIT开源其基于凸优化的MPC方法之前,许多小伙伴都是采用MIT在很早时候提出的Virtual Model Control(VMC)……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3282浏览 0评论665个赞
本片博客描述:如何使用 tf2_ros::MessageFilter 处理 Stamped(时间戳) 数据类型在 TF2 的 体系下 如何使用传感器的数据在 实际 情况下 传感器的数据包括: 相机、激光雷达……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2808浏览 0评论1784个赞
线性近似最常使用的函数近似就是线性近似和人工神经网络。本节介绍线性近似。线性近似是用许多特征向量的线性组合来近似价值函数。特征向量则依赖于输入(即状态或状态动作对)。以动作价值近似为例,我们可以为每个状态动作对定义多个不同的特征x ( s , ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2173浏览 0评论2463个赞
超声波避障程序随处可见,基于51单片机的超声波避障小车也很成熟,但是完整的Proteus仿真并不容易找到开源资料。这次主要给大家分享其Proteus仿真部分。涉及到的模块有:超声波模块(hc-sr04)、L293D电机驱动器和直流减速电机。这/样配合51单片机的控制,小车……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3704浏览 0评论1047个赞
上一篇文章我们简单介绍了信息熵的概念,知道了信息熵可以表达数据的信息量大小,是信息处理一个非常重要的概念。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2763浏览 0评论835个赞
目录一、旋转运动学1.1 线速度与角速度1.2……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2759浏览 0评论2557个赞
由上面一篇文章我们已经知道了,如果我们从真实数据分布里面取n个样本,根据给定样本我们可以列出其出现概率的表达式,那么生成这N个样本数……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2762浏览 0评论2957个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3717浏览 0评论2607个赞
Real-Time Loop Closure in 2D LIDAR SLAM文章精读原文:W. Hess, D. Kohler, H. Rapp, and D. Andor, Real-Time Loop Closure in 2D LIDA……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3174浏览 0评论958个赞
1 前言之前写了几篇关于UR机器人网络控制的文章:《UR机器人返回信息格式解析》、《UR机器人通信端口和协议》,有不少读者问关于编程实现方面的问题,因此,这里上传有关的代码,供同行参考。2 包含内容我这里是用VS……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1944浏览 0评论146个赞
目前,网上大部分源代码有的是基于摄像头检测人物,有的是基于激光雷达信号检测人物,两种方式各有利弊。摄像头检测准确度高,但有死角;激光雷达检测准确度偏低,但能做到360°无死角,基于这个考虑,笔者编写一个算法,集成两者优长,做到智能机器人360°高精度跟踪移动人物。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2519浏览 0评论475个赞
1 概念1.1 机器人本文讨论的机器人,为空间开链连杆机构,其中的运动副(转动副或移动副)常称为关节,关节个数通常即为机器人的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2914浏览 0评论446个赞
强化学习(五) – 时序差分学习(Temporal-Difference Learning)及其实例5.1 TD预测例5.1 回家时……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3227浏览 0评论1158个赞
本篇文章是之前期望极大算法(EM算法)文章的后续,有需要可以先看看那篇文章关于EM算法的推导。高斯混合模型……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3452浏览 0评论906个赞
深度Q学习深度Q学习将深度学习和强化学习相结合,是第一个深度强化学习算法。深度Q学习的核心就是用一个人工神经网络q ( s , a ; w ) , s ∈ S , a ∈ A 来代替动作价值函数。由于神经网络具有强大的表达能力,能够……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2355浏览 0评论923个赞
AMCL首次启动总有个烦恼的问题,就是手动初始化位姿很难给出准确的,也不会自动更新,像下面这样 像这样做成产品当然不行啦。解决上面的问题主要有两个思想(1)用户给个大概初始位姿,算法自动更新寻找真实值(2……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2595浏览 0评论1791个赞
ROS中的地图ROS中的导航……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3457浏览 0评论249个赞
作者在读学校Singapore University of ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3168浏览 0评论2415个赞
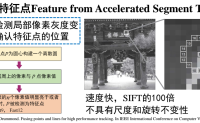
@[toc]一、ORB特征<……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1883浏览 0评论2057个赞
1 概述镜头透镜由于制造精度以及组装工艺的偏差会引入畸变,导致原始图像的失真,即图像畸变。在前一篇文章《机器视觉模型——投影矩阵》中描述了机器视觉系统成像模型,在这个模型里包含了相机内参(与像元尺寸、焦距、像素中心有关)以及相……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2052浏览 0评论2454个赞
在Gan生成对抗神经网络中会用到Jensen不等式,因此做下记录。Jensen不等式告诉我们:如果f ff是在区间[ a , b ] 上的凸函数(就是导数一直增长的函数,或者说是导数的导数大于0的函数),x 是随机变量,那么有:……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1988浏览 0评论387个赞
问题的引出:AMCL的初始位姿通常要求用户手动输入,或者机器加载上一次保存的位姿。AMCL中自带的全局定位服务(globalLocalizationCallback)实际中基本很难用得上。问题解决思路:相机……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2637浏览 0评论242个赞
强化学习(六) – 连续空间中的强化学习6.1 连续空间中的强化学习6.2 离散空间和连续空间……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2336浏览 0评论2342个赞
DQN算法实战-小车上山案例分析实验环境用线性近似求解最优策略用深度Q学习求解最优策略 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1837浏览 0评论999个赞
1、变换设置 设计一……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2761浏览 0评论2389个赞
策略梯度方法-python车杆平衡实战案例分析同策策略梯度算法求解最优策略异策策略梯度算法求解最优策略……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3480浏览 0评论851个赞
坐标系中,一个刚体的状态可用位置和姿态来描述,位置即为该刚体在坐标系中的空间位置,用一个坐标向量即可表达。而要描述刚体的姿态,有很多种表示方法,以下列出常用的:1 旋转矩阵(Rotation matrix)旋转矩阵是在乘以一个……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3370浏览 0评论1427个赞
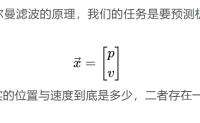
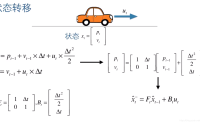
基本概念:1、状态方程: 某一时刻的状态用Xt表示,它是一个列向量,表征了当前位置Pt和当前速……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3164浏览 0评论2340个赞
0x00 概述在前面的教程中,一直都是使用默认提供的一个地图。是不是stdr只能使用这个地图呢?那你就太小看stdr了,它加载地图的方式其实跟我们在amcl中要进行定位时的地图是一样的,都是需要类……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3470浏览 0评论1374个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3419浏览 0评论625个赞
actor-critic方法(一)— 同策方法同策actor-critic方法动作价值actor-critic算法优势actor-critic算法……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2832浏览 0评论872个赞
ROS TF2当前坐标系如何计算其它历史坐标系的坐标变换1、时间旅行2、更高级 的 lookupTransform() 函数 API3、检查结果4、 完成……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3117浏览 0评论2596个赞
英文原文链接:http://www.bzarg.com/p/how-a-ka……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1533浏览 0评论2457个赞
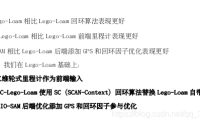
1.序言倒腾一段时间的LIO-SAM,实在是累,是那种没任何收获的感觉。吐槽几点……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3383浏览 0评论2756个赞
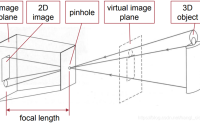
1 机器视觉为什么要做相机标定机器视觉是采用相机成像来实现对三维场景的测量、定位、重建等过程。是一个利用二维图像进行三维反推的过程,我们所处的世界是三维的,而图像或者照片是二维的,可以把相机认为是一个函数,输入量是一个三维场景,输出量是一幅二维图像。正……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1884浏览 0评论222个赞
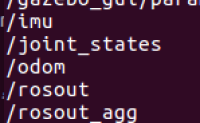
hector_quadrotor编译总结 | ubuntu 14.04 ros-indigo版本基于Ubuntu 14.04 LTS系统所用ROS版本为 Indi……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2864浏览 0评论1456个赞
在MDP环境中训练Q learning创建MDP智能体环境创建Q learning智能体训练Q learning智能体验证Q learning结果……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1699浏览 0评论2886个赞
ROS TF2 中的 四元数 基础部分1、四元数的组成……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2849浏览 0评论1419个赞
1 概述机器视觉就是用机器代替人眼和人脑来做测量和判断。机器视觉系统工作的基本过程是获取目标的图像后,对图像进行识别、特征提取、分类、数学运算等分析操作,并根据图像的分析计算结果,来对相应的系统进行控制或决策的过程。在很多机器视觉应用中……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3641浏览 0评论2921个赞
在机械工程中,Denavit-Hartenberg 参数(也称为 DH 参数)是与一个特定约定相关联的四个参数,用于将参考坐标系附加到空间运动链或机器人操作臂的连杆上。“Jacques Denavit and Richard Hartenberg ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2827浏览 0评论1414个赞





![[强化学习实战]函数近似方法-线性近似与函数近似的收敛性](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20201023201342502.png#pic_center&h=123&w=200&q=90&zc=1&ct=1)










![[强化学习实战]深度Q学习-DQN算法原理](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20201023224237312.png#pic_center&h=123&w=200&q=90&zc=1&ct=1)





![[强化学习实战]DQN算法实战-小车上山(MountainCar-v0)](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20201024095956671.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dhbmd5aWZhbjEyMzQ1Nnp6,size_16,color_FFFFFF,t_70#pic_center&h=123&w=200&q=90&zc=1&ct=1)

![[强化学习实战]策略梯度方法(policy gradient)-python车杆平衡实战](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20201026110818256.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dhbmd5aWZhbjEyMzQ1Nnp6,size_16,color_FFFFFF,t_70#pic_center&h=123&w=200&q=90&zc=1&ct=1)


![[强化学习实战]actor-critic方法(一)—同策方法](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://blog.75271.com/wp-content/themes/com75271/css/img/pic/7.jpg&h=123&w=200&q=90&zc=1&ct=1)