对于机器人的视觉这些信息,很容易在ROS中呈现,但是对于ROS中力和力矩信息的展示,通常在实验室的时候使用真实的机器人和传感器,这个问题不需要考虑,直接读取真实的力和力矩传感器,然后通过ROS消息发布即可。可当疫情导致的有学不能上,有实验室不能去的时候,想在ROS中检验机器人力控……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2836浏览 0评论2696个赞
为什么要利用CMake编译代码并上传到arduino? 当需要开发大点的软件项目,Arduino IDE对代码的管理就变得比较笨拙。 如果你经常想要从命令行或能自动完成的eclipse编译代码 最后你可以通过rosserial_client的CMake基础架构,你利用ROS bu……继续阅读 » 十啵 5年前 (2021-04-26) 3339浏览 0评论2474个赞
SysTick_Handler介绍今天我给大家分享一个基于SysTick_Handler中断实现的按键扫描。SysTick_Handler是……继续阅读 » better_coder 5年前 (2021-04-26) 1876浏览 0评论2510个赞
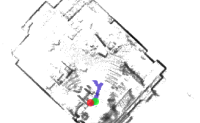
做SLAM的硬件要求(不一定是必须的,看包和库的依赖): (1):差分轮式机器人,可以使用Twist速度指令控制,需要线速度和角速度。 (2):需要激光雷达、深度摄像头等测距设备,可以获取环境深度信息。 (3):最好使用正方形和圆形……继续阅读 » 小小何先生 5年前 (2021-04-26) 1946浏览 0评论164个赞
实物图先来给大家看看我们优秀队友建的手持设备实物图的3D模型吧 &nbs……继续阅读 » better_coder 5年前 (2021-04-26) 3219浏览 0评论1317个赞
1.数据格式 在ROS中点云的数据类型 在ROS中表示点云的数据结构有: sensor_msgs::PointCloud sensor_msgs::PointCloud2……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 2581浏览 0评论2082个赞
目录目录ROS 传感器消息ROS 传感器消息之Laserscan……继续阅读 » 旧人赋荒年 5年前 (2021-04-26) 3249浏览 0评论1252个赞
0x00 为何需要对机器人进行定位? 要想实现移动式机器人的自动导航需要完成以下六点,当然这些信息是我自己总结的仅供大家参考: (1)一张完整的高精度全局地图,机器人需要在该地图下完成自动导航,这是进行自动导航的必要且重要的前提; (2)机器人在地图的……继续阅读 » ROS小课堂 5年前 (2021-04-26) 2278浏览 0评论1168个赞
0x00 什么是costmap代价地图 在机器人进行路径规划时,我们需要明白规划算法是依靠什么在地图上来计算出来一条路径的。依靠的是gmapping扫描构建的一张环境全局地图,但是仅仅依靠一张原始的全局地图是不行的。因为这张地图是静……继续阅读 » ROS小课堂 5年前 (2021-04-26) 3033浏览 0评论1356个赞
0x00 为何需要路径规划? 现在我们已经可以构建当前环境地图,可以实现机器人在当前地图中的定位。那接下来就可以在地图上给定目标点,开始规划路径控制机器人移动过去,这样就可以完成在已知地图中进行自动导航的任务了。在已知地图中进行路径规划可以举一个很形象的例子,大家在……继续阅读 » ROS小课堂 5年前 (2021-04-26) 3246浏览 0评论1596个赞
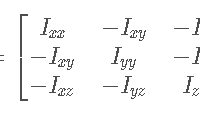
一、刚体的惯性张量 在单自由度系统中,常常要考虑刚体的质量。对于定轴转动的情况,经常用到惯量矩这个概念。对一个可以在三维空间自由运动的刚体来说,可能存在无穷个旋转轴。在一个刚体绕任意轴做旋转运动时,我们需要一种能够表征刚体质量分布的方法。在这里,我们需要引入惯性张量……继续阅读 » gpeng832 5年前 (2021-04-26) 3439浏览 0评论2557个赞
在做图像语言分隔的时候,我们往往需要计算出像素精确度,交并比等值来评估我们的算法或者神经网络的表现。本篇文章着重介绍如何用numpy实现像素精确度、平均像素精确度、平均交并比和加权的交并比的计算。 在正式开始之前需要先掌握几个numpy的函数和编程技巧。  ……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 2431浏览 0评论1298个赞
随着科学技术的发展,机器人逐渐从荧幕上走入现实,但要达到影视中那样的智能和高端还尚需一段时间。个人看来,最符合我们对机器人印象的研发机构当属波士顿动力,该公司每年发布的机器人视频都足以震撼人们的眼球,与现实中人的运动能力越来越贴近。这一系列文章将深入学习波士顿动力机器人的技术细节……继续阅读 » 挽风 5年前 (2021-04-26) 2684浏览 0评论2330个赞
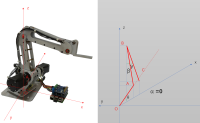
本篇文章主要介绍详细介绍如何使用MATLAB机器人工具箱进行机械臂的正逆运动学求解以及轨迹规划,全文附完整的MATLAB程序,本文主要分六部分进行介绍:一、使用改进型DH法建立机械臂模型,二、正运动学求解,……继续阅读 » 慕羽★ 5年前 (2021-04-26) 3539浏览 0评论2497个赞
问题 把模型放到home目录下的~/.gazebo中,gazebo就会自己找到模型的路径,自动链接. 但是常常我们的project在不同的平台运行时依然需要重新将模型拷贝一次,我常常会觉得很苦恼,直接在同一个project中会带来很大便利. &nb……继续阅读 » 旧人赋荒年 5年前 (2021-04-26) 2995浏览 0评论261个赞
在用机器人和激光雷达跑SLAM算法构建地图时,总感觉激光雷达数据在RVIZ中显示的方向有问题(前提是激光雷达的安装方向正确),知道是tf坐标转换存在问题,但一直没有调整到好的状态,所以查了些相关资料,终于搞明白了ROS中的坐标转换是怎么回事,于是记录下来。 ……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 3056浏览 0评论1490个赞
首先说一下我的心得: 1. 我认为KDL的精髓是Spatial Vector,结合C++等面向对象的语言可以写出较好的软件。 2. 直接阅读KDL代码不适合初学者学习机械臂动力学。 3. 要学习机械臂动力学的话应首先阅读使用3维向量推导公式的文献,也就是线速度和角速……继续阅读 » gpeng832 5年前 (2021-04-26) 3337浏览 0评论2255个赞
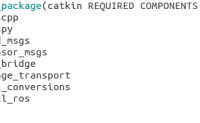
文章目录 ① 背景Ⅰ什么手机ROS 2 包Ⅱ ROS 2 包有什么组成cmake 包py……继续阅读 » 越来越胖了_mengleijin 5年前 (2021-04-26) 2062浏览 0评论2350个赞
解决IAR for msp430的工程文件报xxx.sfr文件有问题的warning现象 最近在开发Ti的msp430f5529的……继续阅读 » better_coder 5年前 (2021-04-26) 3447浏览 0评论2419个赞
Moveit的前身是PR2机器人的机械臂的代码包,之后被集成为一个软件包。它不仅可以实现单个机械臂的控制。而且可以实现两个机械臂的协调控制。而且可以RGB摄像头采集外部障碍物信息,完成自主避障这样的功能。由一系列移动操作的功能包组成,运动规划,操作控制,3D感知,运动学,控制与导……继续阅读 » 小小何先生 5年前 (2021-04-26) 3259浏览 0评论2609个赞
文章目录① 背景② 前提③ 任务……继续阅读 » LiAr 5年前 (2021-04-26) 2532浏览 0评论2776个赞
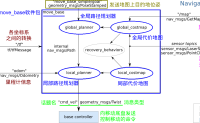
首先了解在导航堆中,move_base包与其它包(如amcl、map_server)的关系,如图所示……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 2079浏览 0评论2507个赞
……继续阅读 » _寒潭雁影 5年前 (2021-04-26) 1823浏览 0评论681个赞
本文记录使用 Kalibr 标定双目相机内外参数以及和IMU之间外参数的标定过程. 采用的硬件设备为小觅的双目VIO设备( MyntEYE), 并且默认你已经有了ROS的知识基础. 标定 stereo-imu 之前, 需要知道双目的内外参数, 所以先进行双目内外参数……继续阅读 » 白巧克力亦唯心 5年前 (2021-04-26) 2839浏览 0评论1116个赞
在ROS中点云的数据类型 在ROS中表示点云的数据结构有: sensor_msgs::PointCloud ……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 3250浏览 0评论1975个赞
0.前言 昨天看了关于SLAM的综述文章一篇,对于其中提到的SIFT,SURF,ORB三种特征提取匹配的方法,非常想要实践学习其Python的编写方法。同时我爸让我帮他写一个树莓派(raspberry pi)检测黑点的程序,黑点有什么好检测的(╯•̀ὤ•́……继续阅读 » Eminbogen 5年前 (2021-04-26) 2304浏览 0评论1726个赞
在Tensorflow中所有的数据都是使用tensor来描述的,不管是变量,常量,placeholder等都是一个tensor,tensor的中文翻译是张量,也就是我们在进行tensorflow编程的时候所有的输入输出都是一个tensor,这一点非常重要的。 下图是……继续阅读 » DiegoRobot 5年前 (2021-04-26) 2640浏览 0评论933个赞
1.pcl_tutorial官方给的模板 int main(int argc, char** argv){ pcl::PC……继续阅读 » 龙啸wyh 5年前 (2021-04-26) 3310浏览 0评论2753个赞
Tensorflow中的变量就是一个放在内存中的tensor结构,用于在计算过程中保存数据,变量的数值可以保存到文件中,也可以从文件中读取 1.变量的初始化 ……继续阅读 » DiegoRobot 5年前 (2021-04-26) 2796浏览 0评论1600个赞
STM32标准库和HAL库的比较使用STM32芯片的时候呢,大家可能都喜欢用库,什么标准库啦,……继续阅读 » better_coder 5年前 (2021-04-26) 2268浏览 0评论2553个赞
之前为了提升svo的鲁棒性,进行了一些不同的尝试,虽然稳定性有所提升,两个视频demo在下面,但依然不尽人意。 效果1 (svo基础上添加了edgelet feature) &n……继续阅读 » 白巧克力亦唯心 5年前 (2021-04-26) 1613浏览 0评论2973个赞
有限状态机它代表有限数量的状态以及各个状态之间进行跳转的动作。举个例子来说,我们现在……继续阅读 » better_coder 5年前 (2021-04-26) 2958浏览 0评论2736个赞
前言 最近学习稠密重建的相关知识,发现变分法通常作为一个平滑的正则项出现在残差平方和的损失函数中。而图像处理中……继续阅读 » 白巧克力亦唯心 5年前 (2021-04-26) 3298浏览 0评论1804个赞
更多创客作品,请关注笔者网站园丁鸟,搜集全球极具创意,且有价值的创客作品 ROS机器人知识请关注,……继续阅读 » DiegoRobot 5年前 (2021-04-26) 1878浏览 0评论278个赞
这里放了一个小强机器人的bag和我自己的bag包,以供大家测试。 链接:https://pan.baidu.com/s/1GF5FNFIKiRV3wbmBH3HwWQ 提取码:668d 前提: 1.需要三维激光启动节点,发布/points……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 1887浏览 0评论1638个赞
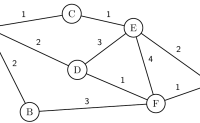
基于快速扩展随机树(RRT / rapidly exploring random tree)的路径规划算法,通过对状态空间中的采样点进行碰撞检测,避免了对空间的建模,能够有效地解决高维空间和复杂约束的路径规划问题。该方法……继续阅读 » 一抹烟霞 5年前 (2021-04-26) 3051浏览 0评论2122个赞
Arduino智能小车系列教程1——智能小车拼……继续阅读 » 懒小象 5年前 (2021-04-26) 1932浏览 0评论2072个赞
在前述文篇《解构波士顿动力机器人(一)》中简述了BigDog的技术原理,然而“踹不倒”、在复杂地形行走的运动控制却是技术核心。本文将从Little Dog机器人为本体,分析运……继续阅读 » 挽风 5年前 (2021-04-26) 1895浏览 0评论1213个赞
URDF(Universal Robot Description Format)——通用机器人描述格式,它是ROS里边使用的一种机器人的描述文件,包含的内容有:连杆、关节,运动学和动力学参数、可视化模型、碰撞检测模型等。 到目前为止,本……继续阅读 » gpeng832 5年前 (2021-04-26) 2298浏览 0评论2252个赞
最近由于需求,需要自定义一些topic格式进行数据的处理。基于常见的数据类型:int32 flosat32 bool 等可以定义出需要的消息格式。 如:example.msg ……继续阅读 » bbtang5568 5年前 (2021-04-26) 1848浏览 0评论1267个赞
前言: 已入强化学习一个学期了,发现自己急需一个物理环境来进行训练机器人,前前后后参考过过许多环境,但是最后选择了Unity3D,这是因为其足够简单,不用费很大的功夫就可以建立一个简易的机器人,只需要编写C#脚本和tensoflow进行通讯,立马就……继续阅读 » JameScottX 5年前 (2021-04-26) 3035浏览 0评论435个赞
Error: L6406E: No space in execution regions with .ANY selector matching问题描述……继续阅读 » better_coder 5年前 (2021-04-26) 2529浏览 0评论552个赞
搜索区域 ……继续阅读 » 一抹烟霞 5年前 (2021-04-26) 2932浏览 0评论620个赞
Arduino智能小车系列教程 Arduino智能小车系列教程1——拼装篇Arduino智能小车系列教程2——测试篇……继续阅读 » 懒小象 5年前 (2021-04-26) 2813浏览 0评论183个赞
1. 算法简介 Catmull-Rom Spline算法是一种插值算法,能够在目标点之间插值生成一条平滑的曲线 算法数学原理不在此介绍 算法特点 什么情况下,可以使用Catmull-Rom Spline算法呢——平滑机器人或无人车的路径 ……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 2779浏览 0评论2794个赞



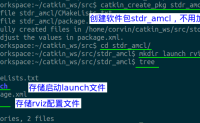






![[ros2学习]-Client Libraries – 创建第一个自己的ROS 2 包](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/20200403165048213.gif#pic_center&h=123&w=200&q=90&zc=1&ct=1)

![[ros2学习]-CLI Tools – 记录和播放数据](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=https://img-blog.csdnimg.cn/2020040219203114.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dlaXhpbl8zNjYyODc3OA==,size_16,color_FFFFFF,t_70&h=123&w=200&q=90&zc=1&ct=1)