文章目录
-
- ① 背景
- ② 前提
- ③ 任务
-
- Ⅰ准备
- Ⅱ 选择一个topic
- Ⅲ ros2 bag 记录
- Ⅳ ros2 bag info
- Ⅴ ros2 bag play
- ④ 总结
① 背景
ros2 bag是用于记录系统中有关主题发布的数据的命令行工具。它累积在任何数量的主题上传递的数据,并将其保存在数据库中。然后,您可以重播数据以重现测试和实验的结果。录制主题也是共享您的作品并允许其他人重新创建作品的一种好方法。
② 前提
- 安装ros2 bag
sudo apt-get install ros-<distro>-ros2bag ros-<distro>-rosbag2* - 环境
- 小乌龟
③ 任务
Ⅰ准备
运行 小乌龟
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key
创建路径
mkdir bag_files
Ⅱ 选择一个topic
我们选择/turtle1/cmd_vel
Ⅲ ros2 bag 记录
命令:
ros2 bag record <topic_name>
多个主题
ros2 bag record -o subset /turtle1/cmd_vel /turtle1/pose
例子
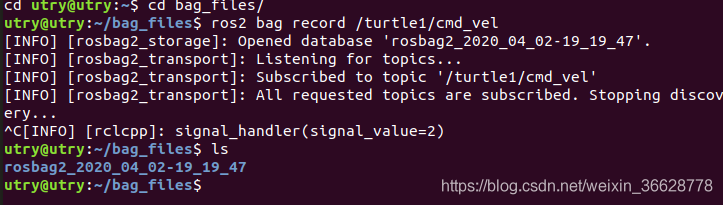
cd cd bag_files
ros2 bag record /turtle1/cmd_vel
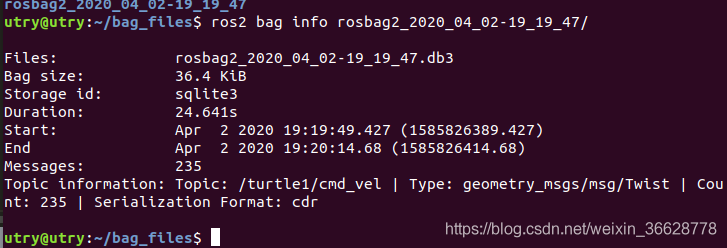
Ⅳ ros2 bag info
ros2 bag info <bag_file_name>
Ⅴ ros2 bag play
命令
ros2 bag play rosbag2_2020_04_02-19_19_47
④ 总结
bag 重要的很




