在上一个博文中介绍了一个简单的目标识别的例子,在这篇博客中,例如是别的结果,完成机械臂的抓取控制,主要进行程序的分析和学习。 包含的头文件: #include <……继续阅读 » 编程芝士 5年前 (2021-04-26) 3073浏览 0评论924个赞
学习到这里为止,SLAM14讲的主要知识就不多了。这章的内容书里只是做了一个简述,因此读起来也没有什么难度。但是初学者不仔细看就很容易犯糊涂。 回环检测的意义: 1.给后端的Pos……继续阅读 » 微鉴道长 5年前 (2021-04-26) 3326浏览 0评论1639个赞
在上一讲中我们介绍了视觉SLAM十四讲的前3讲:基本框架和刚体运动的描述方式(R矩阵,T矩阵)。 面临的问题: 当我们对刚体的运动进行表示了之后,接下来要解决的问题是对得到的表示进行估计和优化。因为……继续阅读 » 目睹闰土刺猹的瓜 5年前 (2021-04-26) 3442浏览 0评论779个赞
这次的笔记我把13讲的部分内容总结一下。 虽然slam的名字叫同步定位与构图,但是书中建图的内容却少的可怜。据此高博给出了自己的解释,意为在定位的过程中,我确定了很多特征点的世界坐标,那这个过程其实就是建图了。一个点云中,每个已知世界坐标系的特征点给它的位置塞一个点,那这不就是建……继续阅读 » 微鉴道长 5年前 (2021-04-26) 2046浏览 0评论703个赞
文章目录 bsplinepolytraj cubicpolytraj quinticpolytraj rottraj transformtraj trapveltraj 参考 ……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 3650浏览 0评论1053个赞
SLAM:同时定位和建图(Simultaneous Localization and Mapping)。 希望机器人从未知环境的未知地点出发,在运动过程中通过重复观测到的地图特征(比如,墙角,柱子等)定位自身位置和姿……继续阅读 » 目睹闰土刺猹的瓜 5年前 (2021-04-26) 2136浏览 0评论741个赞
多姿态插补用于多个连续的姿态,此处采用Squad插值,贝塞尔相关参考深入理解贝塞尔曲线……继续阅读 » white_Learner 5年前 (2021-04-26) 2506浏览 0评论1837个赞
1. SDF建模简介 在使用Gazebo仿真的时候,需要先对环境和机器人进行建模,而Gazebo仿真建模的标准格式就是SDF(sdfor……继续阅读 » gezp 5年前 (2021-04-26) 2537浏览 0评论863个赞
本系列文章主要介绍基于A*算法的路径规划的实现,并使用MATLAB进行仿真演示。本文作为本系列的第二篇文章主要介绍如何利用A * 算法进行路径规划。 ……继续阅读 » 慕羽★ 5年前 (2021-04-26) 2638浏览 0评论697个赞
主题 本章我们要学习的是运动物体的跟踪,现代图像处理中经典的几种跟踪方法主要是:meanshift(均值漂移),Camshift(meanshi……继续阅读 » Eragonl 5年前 (2021-04-26) 3203浏览 0评论603个赞
引言 从这节开始,我们就要去学习单片机相关的知识了,不过不光是单片机,更多的应该是教同学们如何去做一个完整的项目,我们就以STM32F103RB……继续阅读 » 小白 5年前 (2021-04-26) 3318浏览 0评论2825个赞
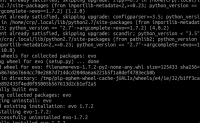
EVO使用教程1 EVO环境安装1.1 二进制安装1.2 源码安装……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 2314浏览 0评论2738个赞
目录背景所需硬件与软件理论基础一阶低通滤波卡尔……继续阅读 » ScottieHan 5年前 (2021-04-26) 3238浏览 0评论633个赞
单目稠密重建和深度滤波器的内容我已经总结在了上一个学习笔记中(SLAM14讲学习笔记(九)单目稠密重建、深度滤波器详解与补充(纠正第13讲 建图 中的错误)),因为在那一部分内容中高博讲的……继续阅读 » 微鉴道长 5年前 (2021-04-26) 2376浏览 0评论856个赞
Matlab中fmincon函数的使用1. 介绍2. 语法3. 示例3.1……继续阅读 » 小黑鸭 5年前 (2021-04-26) 2888浏览 0评论296个赞
目录树莓派控制无人机实现定点降落(六)——地标识别及控制算法的实现1、地标识别2、控制算法……继续阅读 » CyrilSterling 5年前 (2021-04-26) 3347浏览 0评论1293个赞
机器人轨迹规划:三次样条曲线文章目录机器人轨迹规划:三次样条曲线 <……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 3159浏览 0评论1904个赞
……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 3708浏览 0评论2745个赞
在开发ROS项目中我们常常想实现电脑开机以后自动运行一些节点,这里就涉及到了Ubuntu中的一些开机自启动问题,ROS节点的启动与其他脚本的自动运行不一样,不能只写使用rc.local的方式写入,这是因为在那个时候,bash环境还没启动,因此加载不了ROS环境,从而导致启动ROS……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 3653浏览 0评论2070个赞
系统辨识专题(一)——MATLAB系统辨识工具箱的使用案例 在建立多旋翼无人机系统模型的基础上,我们能够更有针对性地设计对应的控制器,为无人机系统故障诊断提供判据。本文将结合系统Matlab自带的系统辨识工具箱阐述一个简单的过程模型的完整辨识过程。 在使用系统辨……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 3223浏览 0评论894个赞
ROS服务 服务(services)是节点之间通讯的另一种方式。服务允许节点发送请求(request) 并获得一个响应(response) 使用 rosservice ross……继续阅读 » 不断积淀 5年前 (2021-04-26) 1798浏览 0评论724个赞
本文为……继续阅读 » white_Learner 5年前 (2021-04-26) 3481浏览 0评论752个赞
机器人对物体进行移动跟随1.物体识别2.移动跟随……继续阅读 » 小黑鸭 5年前 (2021-04-26) 2246浏览 0评论475个赞
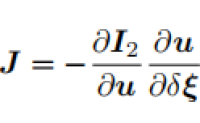
使用g2o优化的前提是,需要对各种误差的理解足够充足。我将雅克比矩阵的详细解析,写在了这里:点击查看 在源码和自定义的类中,各种雅克比矩阵有的是写在源码里的,有的是需要自己修……继续阅读 » 微鉴道长 5年前 (2021-04-26) 3007浏览 0评论2127个赞
本章的内容没有理论知识,完全是由实践部分组成的。 本章主要有两大难点。 第一,g2o的使用。对此,我总结了到了之前的一章中: SLAM14讲学习笔记(十一)g2o图优化中的……继续阅读 » 微鉴道长 5年前 (2021-04-26) 2830浏览 0评论865个赞
本文目录 1.背景2.所需要的软件与硬件3.Motorola编码和Intel编码……继续阅读 » ScottieHan 5年前 (2021-04-26) 2222浏览 0评论1098个赞
前言 本专题将从新手的角度,逐步揭开无人机导航系统的神秘面纱。 传感器作为无人机的重要组成部分,承担了无人机系统对于环境信息以及自身状态采集的重担。大部分的导航算法都离不开对传感器原理的深入了解。 例如,针对不同的传感器……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 1561浏览 0评论2651个赞
无人机自主物体跟随/循迹1. 物体跟踪1.1 实现思路1.2 代码示例……继续阅读 » 小黑鸭 5年前 (2021-04-26) 3343浏览 0评论427个赞
本系列文章主要介绍基于A*算法的路径规划的实现,并使用MATLAB进行仿真演示。本文作为本系列的第三篇文章主要对前两篇文章总结以及对前文中的 A * 算法进行进一步的优化处理……继续阅读 » 慕羽★ 5年前 (2021-04-26) 2416浏览 0评论2103个赞
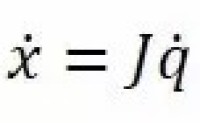
1. 前言 上一篇文章我们从几何意义的角度出发介绍了雅克比矩阵的求解方法,我觉得这种方式是最容易让人接受的一种,但是从几……继续阅读 » hitgavin 5年前 (2021-04-26) 3306浏览 0评论1831个赞
OpenCV 图像的基本处理 1.1 图片读取和显示 1.2 写入文件(保存) 1.3 像素操作 1.4 图片剪切 1.5 镜像处理: 1.6 图像缩放 1.7 图像位移 1.8 图像旋转 1.9 仿射变换 1.10 图像融合 1.11 灰度处……继续阅读 » 小黑鸭 5年前 (2021-04-26) 3445浏览 0评论2789个赞
前言 上一篇中,我们初步了解了多旋翼无人机最常用,也是最核心的几种传感器——IMU、气压计、磁力计、GPS。基于以上几种传感器,我们能够搭建一套完整的组合导航系统,从而对无人机的姿态、速度、位置等信息进行最优估计。 &n……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 1851浏览 0评论1338个赞
此文档作为自己学习过程中一个记录复习,基本来源于《Robotics, Vision & Control》这本书,可以作为matlab机器人工具箱的说明书来用,有兴趣可移步自行下载相关文档 ……继续阅读 » 小磊在路上 5年前 (2021-04-26) 3262浏览 0评论181个赞
本章的理论内容我已经将其总结在了SLAM14讲学习笔记(六)后端(最难一章:卡尔曼滤波器推导、理解以及扩展)以及SLAM14讲学习笔记(七)后端(BA与图优化,Pose Graph优化的理论与公式详解、因子图优化)当中。 本文主要针对其中的代码进行讲解。 ……继续阅读 » 微鉴道长 5年前 (2021-04-26) 2817浏览 0评论729个赞
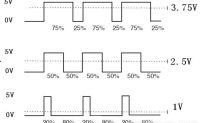
前段时间参加硕士复试,有一道题是pwm是什么,如何产生pwm,录取成功后接下来在这里写一下吧! 1、脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的方法,由于计算机不能输出模拟电压,只能输出0 或5V 的的数字电压值,我们就通过使用高分辨率计数器,利用方波的……继续阅读 » autotian 5年前 (2021-04-26) 2880浏览 0评论2581个赞
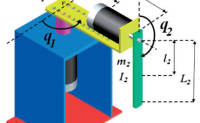
一、动力学基础概念 基本动力学模型 ……继续阅读 » white_Learner 5年前 (2021-04-26) 3176浏览 0评论2879个赞
本章的理论内容已经总结到了SLAM14讲学习笔记(九)单目稠密重建、深度滤波器详解与补充(纠正第13讲 建图 中的错误),这章的内容在关键的深度滤波器的地……继续阅读 » 微鉴道长 5年前 (2021-04-26) 3487浏览 0评论1768个赞
目录 引言位姿的描述(位置与姿态)2.1 平移的描述(位置)2.2 旋转的描述(姿态) 总结 ……继续阅读 » hitgavin 5年前 (2021-04-26) 3564浏览 0评论783个赞
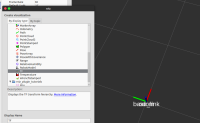
文章目录 GridCells概述 OccupancyGrid使用注意事项 创建工程 在Rviz中实时现实栅格地图 结束语 ……继续阅读 » 懒小象 5年前 (2021-04-26) 2396浏览 0评论2527个赞
1、GPS定位 GPS卫星在空中连续发送带有时间和位置信息的无线电信号,供GPS接收机接收。由于传输的距离因素,接收机接收到信号的时刻要比卫星……继续阅读 » autotian 5年前 (2021-04-26) 2290浏览 0评论2266个赞
OpenCV 图像卷积 2.1 图像卷积 2.2 均值滤波 2.3 中值滤波 2.4 高斯模糊 2.5 Sobel算子 2.6 拉普拉斯算子 2.7 Canny边缘检测算法 2.8 双边滤波 2.9 锐化滤波 最近因项目需要加上自己的兴趣,需要用……继续阅读 » 小黑鸭 5年前 (2021-04-26) 1650浏览 0评论2953个赞
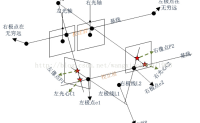
通过视觉传感器赋予机械臂“眼睛”的功能,配合ATI力和力矩传感器,就可以完成机械臂“手眼”结合的能力,完成视觉抓取过程。目前测试的视觉传感器为 ZED mini双目相机,配置安装过程 ……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 4043浏览 0评论608个赞
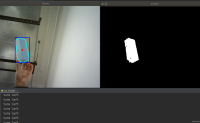
视觉抓取中非常重要的一个部分就是对抓取物体的识别,无论是二维图像还是三维点云,在ROS中都可以找到对应的功能包,本次测试的是能对物体进行快速识别,甚至定位的find_object包,该功能包是基于模板匹配算法(包括彩色图像或点云匹配)。ubunt……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3930浏览 0评论2738个赞
一、什么是决策树 本章着重对算法部分进行讲解,原理部分不过多叙述,有兴趣的小伙伴可以自行查阅其他文献/文章 决策树(decision t……继续阅读 » 我是。 5年前 (2021-04-26) 3279浏览 0评论1251个赞
下一篇:通俗全面理解图卷积与GCN网络(二):从图卷积到GCN 目录前言……继续阅读 » CyrilSterling 5年前 (2021-04-26) 3309浏览 0评论941个赞