这章的内容不多,但是很奇妙的和上一章的串起来了。这里我简单总结一下光流法和直接法,主要想在最后总结和比较一下两个这节和上一节尤其是雅克比矩阵推导上的区别。雅克比矩阵的内容非常关键,如果不能充分理解它们的含义,前端基本就没有办法使用g2o来进行图优化。……继续阅读 » 微鉴道长 5年前 (2021-04-26) 2447浏览 0评论551个赞
引言 实际应用中,我们也会经常使用到直线轨迹,然而(5)中讲的三次多项式并不能满足我们的直线轨迹。然而如果单纯地使用直线轨迹,线段间的转折点会让速度不连续,如何又能使用直线轨迹又能满足速度连续呢?在这里引出一次多项……继续阅读 » aic1999 5年前 (2021-04-26) 3174浏览 0评论442个赞
全文框架……继续阅读 » WillChan_ 5年前 (2021-04-26) 3084浏览 0评论250个赞
模拟退火算法简介 模拟退火是一种通用概率算法,可来在固定时间内寻求在一个大的搜寻空间内找到的最优解,也可以用来求解函数最优解。模拟退火是S. Kirkpatrick, C. D. Gelatt和M. P. Vecchi在1983年所发……继续阅读 » 懒小象 5年前 (2021-04-26) 1849浏览 0评论761个赞
在目标跟踪时,摄像头提供实时的图片信息,我们需要识别出图片目标,且输出目标在图片中的位置,为后续的控制提供条件。在demo中,我是借助darknet_ros实现这一目标。当然,这一模块可以替换成性能更优秀的识别算法。 darknet_ros为yolov3在ros下的……继续阅读 » cabinx 5年前 (2021-04-26) 1650浏览 0评论2436个赞
基本依赖项 pip install \ pandas \ jinja2 \ pyserial \ cerberus ……继续阅读 » 永望 5年前 (2021-04-26) 1528浏览 0评论523个赞
从本文开始,在之后的一段时间里,我会通过本系列文章,详细介绍如何从零开始用51单片机去实现智能小车的控制,本文作为本系列的第一篇文章,主要介绍如何让小车动起来。 ……继续阅读 » 慕羽★ 5年前 (2021-04-26) 2593浏览 0评论2196个赞
本文将系统阐述如何做好电磁车前期的硬件与软件准备工作 硬件部分 认识电感 工字电感 感应赛道交变磁场,产生感应电动势,后续电路……继续阅读 » 不合格的engineer 5年前 (2021-04-26) 2103浏览 0评论271个赞
目录C语言知识点:……继续阅读 » autotian 5年前 (2021-04-26) 3143浏览 0评论219个赞
添加激光传感器1 添加2D雷达实体2 添加3D雷达实体参考资料 激光雷达的添加比较……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 2373浏览 0评论558个赞
目录树莓派控制无人机实现定点降落(一)——树莓派4安装ROS(Kinetic)1、安装ROS仓库2……继续阅读 » CyrilSterling 5年前 (2021-04-26) 2102浏览 0评论1141个赞
这一章的内容并不多,不像视觉里程计那章的内容那么厚。但是我认为它是整个SLAM十四讲中最难的一章,难点主要在于卡尔曼滤波器的推导涉及到一屁股的数学公式,非常的讨厌,如果不能静下心来,就很容易被吓到。但是真正看懂以后实质上它是比较简单的,并没有用到什么太过复杂的变换……继续阅读 » 微鉴道长 5年前 (2021-04-26) 1770浏览 0评论638个赞
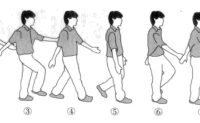
引言 放假前看了一本书:09年坂本范行的《双足步行机器人DIY》,由于该书重点强调实践DIY,在此记录下部分有点启发、有点东西的知识:比如切比雪夫联杆结构、静步行、……继续阅读 » aic1999 5年前 (2021-04-26) 2411浏览 0评论984个赞
开源自主导航小车MickX4(三)底盘ROS节点1、底盘ROS节点1.1 ROS节点功能定义1.2……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 1689浏览 0评论2845个赞
文章目录inverseKinematics利用创建得到的ik对……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 2844浏览 0评论2214个赞
ExampleHelperRobotSimulator类文章目录ExampleHelp……继续阅读 » 懒小象 5年前 (2021-04-26) 3483浏览 0评论2041个赞
1、可观性1.1、可观性定义 客观性即指通过系统输出能否反映系统初始状态(状态的变化能否由输出反映出来); 形式上如果根据一系列的输出及控制输入可以在有限时间内唯一地确定系统状态则系统客观; 其定义中存在三个关键词:动态系统、状态、输出。 ……继续阅读 » autotian 5年前 (2021-04-26) 3192浏览 0评论584个赞
与ROS节点通讯1 设置webots控制器2 创建ROS节点3 代码分析3.……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 2317浏览 0评论2437个赞
目录树莓派控制无人机实现定点降落(二)——树莓派或ubuntu安装mavros1、安装依赖2、创建……继续阅读 » CyrilSterling 5年前 (2021-04-26) 3389浏览 0评论2077个赞
……继续阅读 » 慕羽★ 5年前 (2021-04-26) 2924浏览 0评论2677个赞
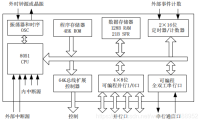
目录一.单片机概述……继续阅读 » 不合格的engineer 5年前 (2021-04-26) 2574浏览 0评论399个赞
文章目录1.总体策略上台策略:……继续阅读 » 路拾遗37 5年前 (2021-04-26) 3370浏览 0评论295个赞
……继续阅读 » cabinx 5年前 (2021-04-26) 3410浏览 0评论530个赞
准备工作……继续阅读 » 小黑鸭 5年前 (2021-04-26) 3148浏览 0评论2902个赞
目录树莓派控制无人机实现定点降落(三)——PX4固件源码编译中的坑1、建立工作空间,克隆固件源码2……继续阅读 » CyrilSterling 5年前 (2021-04-26) 2942浏览 0评论2925个赞
文章目录准备工作generalizedInverseKinematics……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 1938浏览 0评论160个赞
模块十分简单,可以介绍的内容很少。包括两个部分:计算目标物中心距图片中心的偏差,对应cabin_vision/object_deviation;PID跟踪控制,对应cabin_behaviors/pid_tracking。 一、偏差计算 输入输出: ……继续阅读 » cabinx 5年前 (2021-04-26) 1855浏览 0评论503个赞
与ROS通讯1 Camera 相机2 IMU 传感器3 GPS 传感器4 Lidar传感器……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 1590浏览 0评论1179个赞
我会通过本系列文章,详细介绍如何从零开始用51单片机去实现智能小车的控制,在本系列的上一篇文章中介绍了如何让小车动起来,本文作为本系列的第二篇文章,主要介绍让小车实现自动避障所涉及的一些传感器,如超声波模块、漫反射光电管、4路红外寻迹避障传感器的介绍及使用。 对于熟悉这些模块的读……继续阅读 » 慕羽★ 5年前 (2021-04-26) 2254浏览 0评论2142个赞
目录 一.单片机指令简述 二.汇编指令 指令中的常用符号 三.寻址方式 寻址方式与相应的存储器的空间、寄存器 1.寄存器寻址方式 2.寄存器间接寻址 3.立即寻址 4.直接寻址 5.基址寄存器+变址寄存器的间接寻址 6.相对寻址 7……继续阅读 » 不合格的engineer 5年前 (2021-04-26) 2668浏览 0评论1573个赞
新建**.sh文件,写入以下内容: #!/usr/bin/expectset timeout 3spawn ssh username@ipexpect "*password*"send "passwor……继续阅读 » 谦墨 5年前 (2021-04-26) 2184浏览 0评论2765个赞
与ROS通讯1 Webots仿真2 Gazebo仿真3 Stage仿真参考资料……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 1903浏览 0评论2232个赞
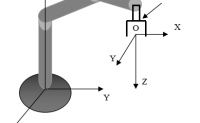
机械臂的控制原本使用的就是ROS进行的,奈何实验室机械臂上买的机械二指夹爪并不支持ROS平台,及没有对应的模型文件和控制的包,因此控制机械手爪就需要其他办法。 所使用的机械手爪为nGripper90,如下图所示,查看手爪的用户手册发现,其配套包括ModBus/Tcp……继续阅读 » 编程芝士 5年前 (2021-04-26) 1761浏览 0评论2441个赞
目录树莓派控制无人机实现定点降落(四)——gazebo无人机定点降落仿真环境搭建1、编译px4_sitl_default……继续阅读 » CyrilSterling 5年前 (2021-04-26) 1964浏览 0评论2012个赞
一、TF2简介 Since ROS Hydro, tf&n……继续阅读 » white_Learner 5年前 (2021-04-26) 2345浏览 0评论1227个赞
一、MATLAB基本功能1、MATLAB帮助 (1)help函数 help可用于查看对应函数的帮助文本 ……继续阅读 » autotian 5年前 (2021-04-26) 3180浏览 0评论236个赞
我会通过本系列文章,详细介绍如何从零开始用51单片机去实现智能小车的控制,在本系列的上一篇文章中介绍了3种可用来让小车实现避障的传感器,本文作为本系列的第三篇文章,主要介绍如何让车实现自动避障。 ……继续阅读 » 慕羽★ 5年前 (2021-04-26) 3410浏览 0评论749个赞
符号意义 x ^ \hat{x}……继续阅读 » white_Learner 5年前 (2021-04-26) 2295浏览 0评论1450个赞
上一节内容中我总结了卡尔曼滤波器的推导及其扩展的过程SLAM14讲学习笔记(六)后端(最难一章:卡尔曼滤波器推导、理解以及扩展),我认为那部分内容直接接触是比较难以理解的。但……继续阅读 » 微鉴道长 5年前 (2021-04-26) 3755浏览 0评论2170个赞
此文目的:旨在详细描述如何自制一个小型ROS机器人,实现自制ROS机器人的移动控制、建图、自主导航,文章从硬件到软件均有详细讲述,提供全套下位机、上位机程序源码,SolidWorks三维建模,CAD图纸,电路图纸,我的本科毕设论文、挑战杯说明书、PP……继续阅读 » autotian 5年前 (2021-04-26) 1825浏览 0评论1639个赞
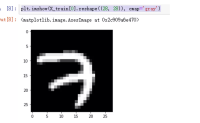
目录 树莓派控制无人机实现定点降落(五)——设计地标以及gazebo导入模型方法1、将地标图像导入gazebo中的方法:……继续阅读 » CyrilSterling 5年前 (2021-04-26) 3336浏览 0评论2118个赞
我会通过本系列文章,详细介绍如何从零开始用51单片机去实现智能小车的控制,在本系列的上一篇文章中介绍了如何让小车实现自动避障,本文作为本系列的第四篇文章,主要介绍蓝牙模块的使用,如何通过蓝牙进行数据传输,并通过手机向蓝牙模块发送指令,从而达到使用手机控制智能小车的运……继续阅读 » 慕羽★ 5年前 (2021-04-26) 2304浏览 0评论2856个赞
本系列文章主要介绍基于A*算法的路径规划的实现,并使用MATLAB进行仿真演示。本文作为本系列的第一篇文章主要介绍如何进行环境的创建,还有一定要记得读前言!!! ……继续阅读 » 慕羽★ 5年前 (2021-04-26) 3406浏览 0评论1977个赞
一、简述 一般来说移动机器人的运动模型可分为完整约束和非完整约束。 完整约束(Holonomic,控制数=自由度):可以用一个由位形变量……继续阅读 » white_Learner 5年前 (2021-04-26) 3123浏览 0评论839个赞
本示例说明了如何解决四连杆机构(简单的平面闭合链机构)的逆运动学问题。 Robotics System Toolbox™不直接支持闭环机制。但是,可以使用运动学约束来近似……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 3361浏览 0评论799个赞