文章目录1. Link元素结构2. link详细属性解析3. joint元素结构4. Joint详细属性解析……继续阅读 » 懒小象 5年前 (2021-04-26) 3741浏览 0评论966个赞
主题 本章我们要学习的是运动物体的跟踪,现代图像处理中经典的几种跟踪方法主要是:meanshift(均值漂移),Camshift(meanshift的优化版本),KCF,光流法等。 我们本章主要介绍的是前两种,meanshift(均值漂移)以及Camshift(……继续阅读 » Eragonl 5年前 (2021-04-26) 2725浏览 0评论797个赞
机器人动力学建模之牛顿欧拉法推导 ……继续阅读 » 西涯先生 5年前 (2021-04-26) 1889浏览 0评论1345个赞
先看书了解一下等效转轴与等效转角 下面是笔记记录部分 像……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 1757浏览 0评论400个赞
……继续阅读 » 慕羽★ 5年前 (2021-04-26) 1851浏览 0评论2704个赞
……继续阅读 » 吴凯荣 5年前 (2021-04-26) 2635浏览 0评论2755个赞
引言 都知道旋转矩阵表达的是刚体(坐标系{B})相对参考坐标系{A}的姿态信息,那如何利用已知的旋转矩阵……继续阅读 » aic1999 5年前 (2021-04-26) 3967浏览 0评论333个赞
引言 哈喽各位~好久不见,看到标题应该知道,小白给大家又要开启一系列的新教程了。肯定有人说我跨度还蛮大的,从ROS到神经网络又到嵌入式教学,其实……继续阅读 » 小白 5年前 (2021-04-26) 2378浏览 0评论2430个赞
全文框架 ……继续阅读 » WillChan_ 5年前 (2021-04-26) 2997浏览 0评论1613个赞
官网教程:http://gazebosim.org/tutorials?cat=guided_i&tut=guided_i6 《一》ros通信的意义 在利用gazebo仿真时。我们可以利用gazebo的通信机制进行创建节点和……继续阅读 » 永望 5年前 (2021-04-26) 2384浏览 0评论604个赞
……继续阅读 » 慕羽★ 5年前 (2021-04-26) 3480浏览 0评论957个赞
导言 我们都知道关节一般会导致(驱动)机械臂产生两种状态:平移或者转动。也知道我们需要借助坐标系来描述物体的姿态和位置信息,那如何为一整个机械臂建立一个完整的坐标系,从而……继续阅读 » aic1999 5年前 (2021-04-26) 3046浏览 0评论1676个赞
文章目录教程描述准备工作 2.1 创建工作空间 2.2 创建ROS硬件描述包小车模型示意图创建urdf……继续阅读 » 懒小象 5年前 (2021-04-26) 2587浏览 0评论1059个赞
之前对MoveIt的印象一直停留在使用Rviz拖动机械臂模型,然后再点击“plan”实现轨迹的规划,点击“execute”执行机械臂的运动这种比较浅层的功能。实际我们在控制机械臂运动的时候大都是通过编程的方式控制,而不是Rviz的图形化控制。 在MoveIt中有三个主要的控制接口……继续阅读 » 编程芝士 5年前 (2021-04-26) 3694浏览 0评论2043个赞
一、无人机控制中的坐标系 无人机运动学中,有三种需要了解的坐标系 1.1、地球中心坐标系(ECEF) ……继续阅读 » autotian 5年前 (2021-04-26) 2241浏览 0评论2792个赞
开发平台:unity2017 个人版 目前实现的效果: ……继续阅读 » 永望 5年前 (2021-04-26) 1871浏览 0评论2779个赞
Dubins曲线简介 Dubins曲线是在满足曲率约束和规定的始端和末端的切线方向的条件下,连接两个二维平面(即X-Y平面)的最短路径,并假设车辆行驶的道路只能向前行进。如果车辆也可以在反向行驶,……继续阅读 » 懒小象 5年前 (2021-04-26) 3455浏览 0评论193个赞
主题 之前我们在 (Python)从零开始,简单快速学机器仿人视觉Opencv—运用三:物体运动跟踪 中已经学习了关于Meanshift和Camshift的运算,本章节将……继续阅读 » Eragonl 5年前 (2021-04-26) 3218浏览 0评论506个赞
理解飞行模式对于能够操纵运行Ardupilot和MAVLink协议的无人系统至关重要。 Ardupilot定义了几种飞行模式。 在本节中,我们介绍最重要且更常见的交易模式。 1、The STABILIZE mode 稳定……继续阅读 » autotian 5年前 (2021-04-26) 2935浏览 0评论1092个赞
具体介绍见就上一篇文章:《MoveIt简单编程实现机械臂运动(正运动学)》 使用的是probot机械臂模型,还是在关节空间下。首先看一下逆运动学规划的例程,逆运动学规划简单的……继续阅读 » 编程芝士 5年前 (2021-04-26) 2650浏览 0评论1642个赞
4.IMU预积分 IMU预积分主要干了2件事,第一个是IMU预积分获得α、β、γ值,另一个是误差传递函数的获取。本部分的流程图如下图所示。 ……继续阅读 » iwande 5年前 (2021-04-26) 1696浏览 0评论2405个赞
……继续阅读 » 慕羽★ 5年前 (2021-04-26) 3381浏览 0评论1941个赞
嗨伙计们,我又来啦~ 想了这么长时间,终于准备着手了!今天跟大家一起分享下webots中是如何实现LQR控制的。 今天就不多啰嗦了,下面开始进入我要跟大家分享的内容。 还是老样子,我们先来介绍一下文章安排:第一部分,我们将在webots中……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 3180浏览 0评论921个赞
写在前面 下面程序中涉及到如下两部分内容: 正逆运动学算法:五自由度机械臂正逆运动学算法(C语言+Matlab) 简……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 2333浏览 0评论1271个赞
Moveit在规划路径的时候考虑如何躲避障碍物的问题,Moveit可以实时的检测空间中的障碍物,并规划处轨迹绕过障碍物。 在场景中加入障碍物方式 ……继续阅读 » 编程芝士 5年前 (2021-04-26) 2709浏览 0评论2834个赞
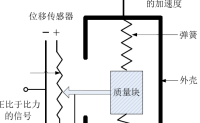
1、三轴加速度计 ……继续阅读 » autotian 5年前 (2021-04-26) 2250浏览 0评论2963个赞
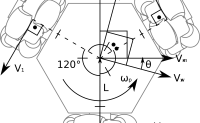
文章目录运动学模型小车坐标系下运动模型分析小车坐标系与世界坐标系转换小车坐标系转换到世界坐标系……继续阅读 » 懒小象 5年前 (2021-04-26) 2350浏览 0评论2775个赞
简介 今天来分享一下我是如何用最短的时间进行智能小车的PID调速的。在疫情期间比较无聊,在某宝买了一个智能小车底盘和一堆零件,基于Arduino Due和树莓派进行开发,Due负责底层控制,树莓派进行上层控制器开发,比如斯坦利控制器或者模型预测控制器进行轨迹跟踪……继续阅读 » ScottieHan 5年前 (2021-04-26) 3265浏览 0评论918个赞
主题 在本节中我们将描述一种称为图像修复的区域填充算法。 这种图片修复算法的作用是可以通过使用OpenCV模块来进行图片上异常划痕或斑点等噪线、噪点的修复,而且代……继续阅读 » Eragonl 5年前 (2021-04-26) 2562浏览 0评论1977个赞
最近做项目需要用到动态配置PID参数,于是将dynamic_reconfigure学了一下,在此开个博文记录一下过程,同时也希望对有需要的同学能起到一些帮助。 ……继续阅读 » 小黑鸭 5年前 (2021-04-26) 3396浏览 0评论2688个赞
前两篇文章是关于在关节空间中进行机械臂的运动控制: MoveIt简单编程实现关节空间机械臂运动(逆运动学) ……继续阅读 » 编程芝士 5年前 (2021-04-26) 3325浏览 0评论1494个赞
Matlab航迹规划仿真——OBG栅格详解 文章目录 ……继续阅读 » 懒小象 5年前 (2021-04-26) 3082浏览 0评论2739个赞
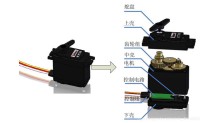
本文将会系统阐述在做智能车过程中舵机学习的注意事项 当拿到一个舵机我们应该怎么做?事先应该去做什么准备验证工作? &n……继续阅读 » 不合格的engineer 5年前 (2021-04-26) 2296浏览 0评论2015个赞
引言 我们已经知道如何已知角度去推算机械臂末端的位置,那么如何由位置反推出机械臂到达需求位需要的角度呢? ……继续阅读 » aic1999 5年前 (2021-04-26) 2585浏览 0评论973个赞
@[toc] 1. POMDP用途 常用的简称: Markov decision proces……继续阅读 » 懒小象 5年前 (2021-04-26) 3250浏览 0评论2466个赞
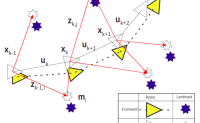
1、前言 前一段时间看过我文章的都知道,我打算写一个SLAM源码阅读的文章,然后,我就去读了Gmapping的源码,感受良多,不足的地方是源码太乱了,阅读起……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 1873浏览 0评论2733个赞
……继续阅读 » 慕羽★ 5年前 (2021-04-26) 2855浏览 0评论1601个赞
开源自主导航小车MickX4 目录 1 ROS底盘运动控制 1.1 小车控制流程图 1.2 小车控制核心代码分析 1.2.1 小车核心代码-遥控器解析 1.2.2 小车核心代码-电机反馈数据 1.2.3 小车核心代码-PI……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 3177浏览 0评论2340个赞
直接总结吧:这一节描述的视觉里程计就是检测特征点,特征点匹配,匹配上以后算位姿和深度。 特征点检测: Fast特征点:……继续阅读 » 微鉴道长 5年前 (2021-04-26) 3587浏览 0评论777个赞
在目标跟踪时,摄像头提供实时的图片信息,我们需要识别出图片目标,且输出目标在图片中的位置,为后续的控制提供条件。在demo中,我是借助darknet_ros实现这一目标。当然,这一模块可以替换成性能更优秀的识别算法。 darknet_ros为yolov3在ros下的……继续阅读 » cabinx 5年前 (2021-04-26) 2211浏览 0评论1337个赞
事前准备 使用库: opencv,可以用pip install opencv-python来安装(注意!不是pip install opencv!!!) numpy(这个本节不用,但是以后经常要用到) <……继续阅读 » Eragonl 5年前 (2021-04-26) 3182浏览 0评论795个赞
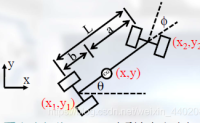
目录 1.两种智能小车的构造简介2.需要的软件与硬件3. Car-like小车建模与仿真3……继续阅读 » ScottieHan 5年前 (2021-04-26) 2488浏览 0评论2280个赞
引言 在真实需求中,当我们的机械臂已经拿到了一支笔,那怎么设定轨迹让它画一只鸭子之类的呢,或者怎么样让机械臂拿到杯子后挂在墙上呢?我们需要知道手臂状态(位置状态、速度状态)和时间的关系,从而拟合出一条连续(重点)的……继续阅读 » aic1999 5年前 (2021-04-26) 3394浏览 0评论1858个赞
《一》实现步骤: (1)启动 Gazebo 模拟器; (2)起飞无人机并开始录制一个 rosbag; (3)控制无人机围绕建筑物绕圆周飞行一圈; (4)停止 rosbag 录制并使用提供的脚本提取图片; (5)使用提供的网站构建模型 前期准备: (1)更新GAAS ……继续阅读 » 永望 5年前 (2021-04-26) 3146浏览 0评论1198个赞
准备工作 使用库: numpy opencv 任务1 用摄……继续阅读 » Eragonl 5年前 (2021-04-26) 3532浏览 0评论884个赞