非常感谢古月居提供的这次参与内测的机会。 AWS RoboMaker概述 AWS RoboMaker 提供基于云端的机器人应用程序(包括ROS2)开发环境、模拟环境,可以方便的通过浏览器在云端……继续阅读 » Tong 5年前 (2021-04-26) 2118浏览 0评论1300个赞
物联网时代,作为对物理世界进行感知的传感器必不可少,每一种传感器的出现和有效利用都帮助我们对世界增加一个角度的认知。从古老的麦克风、摄像头、温度计到现在电赛中必用的姿态传感器、位置传感器等等,琳琅满目,种类繁多。 我们的处理器接受的外界信号除了按键、开关之外(参见上……继续阅读 » 电子森林 5年前 (2021-04-26) 2592浏览 0评论199个赞
AWS RoboMaker入门(一)……继续阅读 » 一凡 5年前 (2021-04-26) 1948浏览 0评论2053个赞
摘要 这一章将进入机器人语音交互的学习,让机器人能跟人进行语音对话交流。这是一件很酷的事情,本章将涉及到语音识别、语音合成、自然语言处理方面的知识。本章内容: ……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3456浏览 0评论816个赞
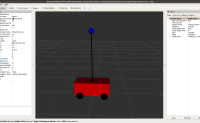
前言 上一篇博客:ros机器人编程实践(16.2)- 仿真SmartCar之模型“飞起来“ 上一章我们将模型导入到rv……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 1701浏览 0评论493个赞
在完成对云实践平台的熟悉后,内测的第二部分实验是SLAM建图和导航。 首先在建立开发项目前,需要创建开发环境,由于内测用户每个账号可以创建两个开发环境,所以这时我新建了一个开发环境。完成创建,进入开发IDE后,我们可以在开发环境主文件夹下新建项目文件夹,每个项目应包……继续阅读 » 9easy_2690 5年前 (2021-04-26) 3389浏览 0评论1230个赞
tensorflow的CNN ……继续阅读 » 一三五 5年前 (2021-04-26) 3037浏览 0评论2968个赞
AWS RoboMaker入门(二)……继续阅读 » 一凡 5年前 (2021-04-26) 2455浏览 0评论2915个赞
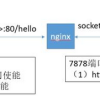
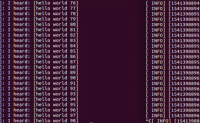
AWS RoboMaker Hello World 运行分为两部分,先是通过实例应用程序运行 Hello World 模拟作业,再就是进入实际开发环境,通过代码运行,启动模拟作业。 实例应用程序 Hello World……继续阅读 » Tong 5年前 (2021-04-26) 2389浏览 0评论1946个赞
参考代码:https://github.com/tork-a/jog_control.git 将参考代码功能包放置到自己机械臂功能包同一目录下。在工作空间进行编译catkin_make编译可能遇到的两个问题: 1)缺少fake-jo……继续阅读 » 搁浅 5年前 (2021-04-26) 1774浏览 0评论2173个赞
0.安装步骤预览 (1)系统默认自带python2.x,所以需要先安装python3.x (2)python2对应pip,python3对应pip3,用源码安装python3后pip3也自动安装了 (3)用pip3安装virtualenv (4)用virtual……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3538浏览 0评论2475个赞
android要与ROS通讯,一种是基于rosbridge,另一种是基于rosjava库。 相关参考例子工程 ……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3079浏览 0评论682个赞
引言 随着人工智能的热度不断增加,很多人看到了机器学习的许多优势之处。这个系列将从下载pycharm编译器,搭建pytorch环境,利用open……继续阅读 » 小白 5年前 (2021-04-26) 2704浏览 0评论1002个赞
如果不了解ROS 2,推荐先体验一下吧,具体教程:机器人操作系统二(ROS2)- 启程 Departure ROS 2项目的目标是继承ROS 1的优点并改进不合……继续阅读 » zhangrelay 5年前 (2021-04-26) 3029浏览 0评论2376个赞
3.6 ROS小车启动功能包编写……继续阅读 » 小白学移动机器人 5年前 (2021-04-26) 1739浏览 0评论2817个赞
在每届的全国大学生电子设计竞赛中,DDS作为信号源、以及通信里面本振、波形合成的基本方式,几乎成了必考的技能,虽然考察的角度不同,但核心都是一个 – 通过数字的方式得到你需要的某种频率的某种幅度的某种波形。 在测试测量领域有另一个概念 – AWG(任意波形发生器)是……继续阅读 » 电子森林 5年前 (2021-04-26) 1664浏览 0评论1833个赞
倒立摆是自动控制原理或现代控制理论等经典分析案例,博客有数篇博文针对这样案例给出题目和分析: ……继续阅读 » zhangrelay 5年前 (2021-04-26) 2792浏览 0评论1899个赞
由于用Notability写的公式,有些是换页的,导致被分解开了,也想到图片可能不清晰,可以通过下面链接下载PDF以及配套代码~.~ 百度网盘链接:https://pan.baidu.com/share/init?surl=UhYExJC……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 2832浏览 0评论320个赞
ROS中catkin CMakeLists.txt的内容。 CMakeList.txt文件是CMake编译系统编译软件包过程的输入文件。任何CMake兼容包都包含一个或多个CMakeLists.txt文件,这些文件描述了如何编译代码以及将其安装到哪里。将CMakeL……继续阅读 » 很不专业 5年前 (2021-04-26) 1976浏览 0评论2624个赞
Hello,欢迎做客我的博客! 在动力学仿真中,我们不得不采用迭代的方法进行数值计算,这个时候我们会用到离散化的数学模型。 可是,我们在建立模型时,考虑的都是连续的情况……继续阅读 » 西涯先生 5年前 (2021-04-26) 2800浏览 0评论2221个赞
引言 接上篇,我们搭建完了环境,并下载好所需要的功能包后,我们需要对图像首先进行一个预处理,由于是教大家入门pytorch,因此CV部分的预处理……继续阅读 » 小白 5年前 (2021-04-26) 2810浏览 0评论926个赞
嘿嘿嘿我回来了! 李群和李代数真的让我头大,做为一个本科生,又不像高博他清华大学本科线性代数就先讲群,我们都是从矩阵起步的。所以很多数学知识真的是从零学起,又夹杂了很多近世代数和抽象代数的知识,就更难以理解了。我不光记录下了学习的笔记还有一些,学到一定地方的感悟。↓……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 2843浏览 0评论2899个赞
自定义Action消息 Action的消息规范主要是为了描述Client端和Server端交互的数据格式,具体来说,就是为了去描述Goal,Feed……继续阅读 » 很不专业 5年前 (2021-04-26) 1760浏览 0评论2418个赞
惯性张量是什么? 惯性张量是用于描述刚体转动惯性的一个量,并且它是一个矩阵。它通常表示为: ……继续阅读 » 西涯先生 5年前 (2021-04-26) 3134浏览 0评论2251个赞
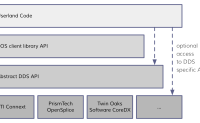
这篇教程简要说明,在CoppeliaSim仿真环境中,使用ROS2接口,如果是ROS 2 Dashing,直接使用安装包中的compiledRosPlugins文件夹下的libsimExtROS2Interface.so。 ……继续阅读 » zhangrelay 5年前 (2021-04-26) 1976浏览 0评论1112个赞
效果:安装步骤:# ROS Kinetic:$ sudo apt-……继续阅读 » 很不专业 5年前 (2021-04-26) 3463浏览 0评论1361个赞
封面就是我的双目相机了 —— MYNT EYE D小觅双目摄像头深度版系列结构光双目深度惯导相机。之后会做测评的视频?或者博客吧~ 下面还是重头戏,看了上一期 ……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 3175浏览 0评论1550个赞
刚体动力学基础学习 ……继续阅读 » 西涯先生 5年前 (2021-04-26) 3200浏览 0评论2347个赞
由于最近要在OpenCV3中使用SIFT和SURF特征提取,而自从OpenCV2升级到OpenCV3版本后,SIFT、SURF等这些算法都被移出opencv默认项目库,而被放到叫opencv_contrib的项目库。因此需要手动下载opencv和opencv_contrib的源码……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3257浏览 0评论1309个赞
背景和初衷 小弟是University of Colorado at Boulder的一个在读学生.在ARPG(Autonomous Robotics and Perception Group)实验室学习. 自己当初入门ROS的时候……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 2858浏览 0评论2314个赞
前段时间周更的vSLAM基础系列突然停更了,也是因为考试周时间不足以让我在看书和写博客之间调剂了。希望朋友们能体谅一下。 ……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 2761浏览 0评论2910个赞
又过了好久了…Em…上一讲我们不甚详细地提及了EKF扩展卡尔曼滤波,这一讲我们就来说扩展卡尔曼滤波在SLAM里的应用。需要再次提及的是EKF-SLAM是比较早期的应用,但是因为简单好懂,所以用来帮助我们来熟悉一下SLAM的过程。 一旦要使用扩展卡尔曼滤波,我……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 2802浏览 0评论2630个赞
关于机器人运动学与动力学建模的几点迷思疑问1:运动学应该从速度开始推还是从位置开始推? 为什么会产生这样的疑问?我们可以从下面这个问题开始!……继续阅读 » 西涯先生 5年前 (2021-04-26) 2329浏览 0评论2687个赞
前言:几天前就在打浦桥程序员公众号上了解到MATLAB 2020b更新的消息,过了几天才在Mathwor……继续阅读 » 二民院小学生 5年前 (2021-04-26) 2662浏览 0评论2126个赞
发布接收int类型消息 第一篇文章我们发布接收了string类型的消息.我们提到在ROS里发布的消息必须是在ROS中定义了的.就是如果你要发布一个string类型的消息,你不能直接发布一个std::string,你得发布一个std_msgs::S……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 3378浏览 0评论2848个赞
引言 这篇博客介绍的是,如何在windows环境下搭建基于CMake和GCC的开发环境。这里使用的编辑器是VSCode。害怕麻烦的同学不应该搭建这个开发环境,应该直接使用VS Studiao的集成开发环境。 而我之所以要搭建这个环境,是因为为了方便……继续阅读 » 西涯先生 5年前 (2021-04-26) 2369浏览 0评论414个赞
看最新动态,ROS1基本稳定更新维护,ROS2研发进度超快。 现有的ROS1功能包几乎涵盖了所有主流机器人和所有主流机器人学算法,同时这些大部分开源。 未来主流技术主要有如下类别: ……继续阅读 » zhangrelay 5年前 (2021-04-26) 2833浏览 0评论261个赞
引言 接上篇,这部分是图像预处理的后百分之五十的工作,也就是把上期代码识别出的车牌进行字符分割。 下面进入正题~ ……继续阅读 » 小白 5年前 (2021-04-26) 1572浏览 0评论2000个赞
之前,上过机器人或者单片机或者计算机或者控制的相关课程,急需一款适用于多课程的融合性机器人。 自己搭建机器人如下: ……继续阅读 » zhangrelay 5年前 (2021-04-26) 3093浏览 0评论1614个赞
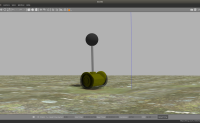
之前,现代控制理论,研究过一些倒立摆和自平衡小车,现在用ROS+Gazebo环境尝试一下。 ROS自平衡机器人仿真(机器人操作系统+现代控制理论融合案例) 找了一些案例都是……继续阅读 » zhangrelay 5年前 (2021-04-26) 1920浏览 0评论2968个赞
在库中安装如下: ……继续阅读 » zhangrelay 5年前 (2021-04-26) 2748浏览 0评论2092个赞
……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 2639浏览 0评论2765个赞
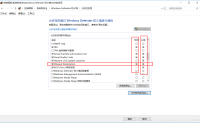
描述:本来VMware用着很好,升级系统之后第二天发现打开软件特别慢,特别是还转圈圈,VMware打开需要半天才进入、打开系统很慢、运行很慢,其实导致这个软件的原因就是软件被防火墙阻截了!……继续阅读 » TianXin1432516744 5年前 (2021-04-26) 1971浏览 0评论2007个赞
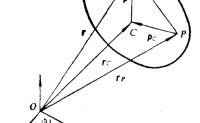
在阅读本文之前,推荐阅读前篇ROS机器人TF基础和全部资料文档: TF基础:https://blog.csdn.net……继续阅读 » zhangrelay 5年前 (2021-04-26) 2825浏览 0评论458个赞
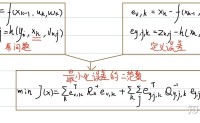
扩展卡尔曼滤波定位是马尔可夫定位中的一种特殊情况,在EKF定位算法中,我们假设地图是由一系列特征组成的,并且每个特征都是独特的。在t时刻的任何一个点,机器人可以通过传感器获得由与附近特征的距离、方向组成的向量: Z_t =……继续阅读 » Z 5年前 (2021-04-26) 1798浏览 0评论951个赞