第二次翻看《视觉SLAM十四讲》,发现第一次看过的都忘记了,认真分析了一下,我认为是第一次学习没有弄清楚整体的脉络。因此这次做一个小小的总结,希望不要再过几天又忘掉。前面的内容就没有总结的意义了,因为是最简单的,真正进入SLAM,应该是从这章的内容开始。 ……继续阅读 » 微鉴道长 5年前 (2021-04-26) 3959浏览 0评论2868个赞
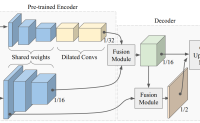
轻量级实时语义分割:ENet & ERFNetENetERFNet总结 ENet: A D……继续阅读 » Hecttttttttt 5年前 (2021-04-26) 3343浏览 0评论834个赞
voxblox结构图 上一讲我们说……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 2381浏览 0评论2655个赞
主题 首先我们先来看下我们的原图: ……继续阅读 » Eragonl 5年前 (2021-04-26) 2419浏览 0评论473个赞
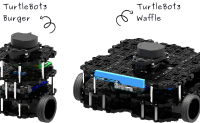
概述 小车外形:……继续阅读 » WillChan_ 5年前 (2021-04-26) 3423浏览 0评论2387个赞
一、标定实现 机器人工具坐标系标定就是确定工具坐标系相对于末端连杆坐标系的变换矩阵 1.1 TCP位置标定 ……继续阅读 » white_Learner 5年前 (2021-04-26) 3150浏览 0评论555个赞
这一小节将介绍使用键盘,通过串口发布速度指令。 本文所有代码均在 ……继续阅读 » ZEEN 5年前 (2021-04-26) 1838浏览 0评论2549个赞
添加IMU传感器1. 添加姿态测量传感器 InertialUnit1.1添加 InertialUnit实体……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 3239浏览 0评论273个赞
一、概要 比赛规则与赛道: 比赛没有赛道,只有电磁线。但赛道元素包括有直道、弯道、坡道、十字路口以及横断路障。室外电磁组原则上选择室外的马路、草坪、体育场组织比赛,场地内……继续阅读 » WillChan_ 5年前 (2021-04-26) 3585浏览 0评论2010个赞
8.sliding window8.1 理论基础 实际上,这一部分跟后端非线性优化是一起进行的,这一部分对应的非线性优化的损失函数的先验……继续阅读 » iwande 5年前 (2021-04-26) 2953浏览 0评论1169个赞
文章目录本文软件版本软件介绍代码功能介绍……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 1798浏览 0评论1912个赞
轻量级实时语义分割:Guided Upsampling Network for Real-Time Semantic Segmentation介绍网络设计……继续阅读 » Hecttttttttt 5年前 (2021-04-26) 1888浏览 0评论719个赞
添加camera相机1. 添加camera实体2. 添加camera控制接口代码3. 运行效果参考资料……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 3418浏览 0评论359个赞
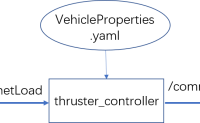
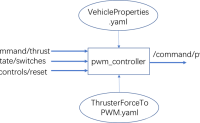
推进器电机模型文件的内容只有一个:推进器推力与PWM波的映射关系。当我们推算得到某时刻该推进器需要提供的推力时,我们需要根据映射关系计算出出对应的PWM波下发给下层以实现控制。不同类型的推进器推力与PWM波的映射关系是不同的,这个有的产品可能会给出,没有的话可能需要自行测定。 &……继续阅读 » iwande 5年前 (2021-04-26) 1715浏览 0评论1380个赞
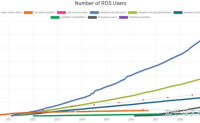
近两年来,双十一上热搜的已经不仅仅是划算的原因了,还有着#数学不好算不清##忘记合并尾款#等令人头大的规则,直播间还是旗舰店?怎么凑单怎么满减?养猫组队又是什么操作? 如果你算不清淘宝双十一,那古月居这么简单明了,你一定算的清。毕竟我们只做两件事情:送钱&……继续阅读 » 你好哇塞 5年前 (2021-04-26) 4364浏览 0评论1711个赞
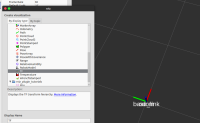
1、创建功能包创建odom_tf_package功能包 c……继续阅读 » ZEEN 5年前 (2021-04-26) 2211浏览 0评论647个赞
一、运动规划算法简述 实现流程 通过给定的轨迹点,根据设定的最大速度和加速度计算每个点的速度,加速度和时间帧。 轨迹点:可通过插补获得,数据类型为moveit_msgs::RobotTraje……继续阅读 » white_Learner 5年前 (2021-04-26) 2452浏览 0评论2000个赞
无人机仿真-PX4固件编译、3D仿真环境gazebo及offboard模式控制无人机运动 这篇博客讲的是如何使用仿真环境进行无人机的仿真和控制,如果还没搭建好仿真环境,可以参考我的上一篇……继续阅读 » 不断积淀 5年前 (2021-04-26) 3553浏览 0评论573个赞
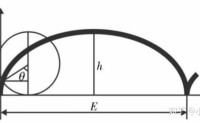
主题 视觉测距作为机器视觉领域内基础技术之一而受到广泛关注,其在机器人领域内占有重要的地位,被广泛应用于机器视觉定位、目标追踪、视觉避障等。 视觉测距主要分为单目测距、双目测距、结构光测距等。结构光由于光源的限制,应用的场合比较固定;而双目测距的难点在于特征点的……继续阅读 » Eragonl 5年前 (2021-04-26) 2829浏览 0评论327个赞
轻量级实时语义分割:ICNet & BiSeNetICNet贡献Image Cascade……继续阅读 » Hecttttttttt 5年前 (2021-04-26) 2410浏览 0评论571个赞
文章目录本文软件版本jointSpaceMotionModel……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 2026浏览 0评论2108个赞
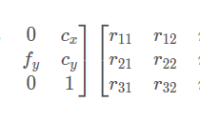
相机模型这节的内容是最最基础重要的内容。再次回顾依然有所收获。但这一章的内容其实并不多。但是容易混淆。 1.一共涉及到的坐标系有四个: 第一,世界坐标系; 第二,相机坐标系; 第三,归一化相机坐标系; 第四,像素坐标系。 世界坐标系意如其名,不多解释;而……继续阅读 » 微鉴道长 5年前 (2021-04-26) 1739浏览 0评论2808个赞
本文将介绍两种使用激光雷达的建图方法 本文所使用的代码:网盘链接&nb……继续阅读 » ZEEN 5年前 (2021-04-26) 2847浏览 0评论552个赞
深入了解ROS之编写无人机控制程序包 这篇教程来详细介绍一下如何编写出一个控制无人机的ROS程序包 编写ROS程序包推荐roboware-studio,这款软件是在开源的……继续阅读 » 不断积淀 5年前 (2021-04-26) 2900浏览 0评论329个赞
现在开始介绍demo的基础控制模块程序。基础控制模块包含推力分配模块、PWM波计算模块,数据串口下发模块。每个模块的主要功能可以回头看软件框架简介的那一篇文章,在此不做介绍,后续主要介绍的是程序中的一些关键点。 本文主要介绍的推力分配模块的几个关键函数。对应程序中的……继续阅读 » cabinx 5年前 (2021-04-26) 1753浏览 0评论2305个赞
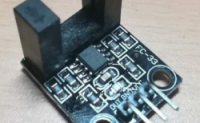
文章目录Arduino智能小车——小车测速测速模块的安装测速模块讲解……继续阅读 » 懒小象 5年前 (2021-04-26) 1845浏览 0评论2222个赞
主题 本章我们要学习的是目标物体检测,这里我们需要使用到SIFT特征提取,BOW词袋建立以及SVM支持向量机的知识(这些讲起……继续阅读 » Eragonl 5年前 (2021-04-26) 2481浏览 0评论1000个赞
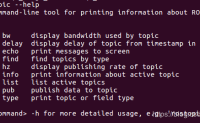
一、概述 机器人开发是一门综合学科,需要用到各方面知识,包括且不限于计算机,数学和物理等各个领域。因其综合程度高使其开发较为繁琐且困难,ROS的出现大大简单了机器人开发的门槛,ROS全称Robot Operating System,本质上是一个分布式系统架构,提……继续阅读 » white_Learner 5年前 (2021-04-26) 1839浏览 0评论114个赞
文章目录无人机仿真之仿真平台搭建前言ardupi……继续阅读 » 不断积淀 5年前 (2021-04-26) 2302浏览 0评论1060个赞
这部分内容相当简单,基本上读懂推进器电机模型文件就很容易能读懂程序。可以查阅之前撰写的关于电机模型文件的文章(链接)。程序对应c……继续阅读 » cabinx 5年前 (2021-04-26) 2269浏览 0评论2908个赞
全文框架 ……继续阅读 » WillChan_ 5年前 (2021-04-26) 3067浏览 0评论504个赞
基于unity无人机3D仿真《一》实现无人机的模型的制作、运动学关系、姿态角等;实现无人机各种姿态运动。 一、目前的效果 ……继续阅读 » 永望 5年前 (2021-04-26) 2287浏览 0评论435个赞
在linux下使用opencv编译yolo前言安装opencv1) 安装依赖文件……继续阅读 » Hecttttttttt 5年前 (2021-04-26) 3054浏览 0评论1465个赞
一、准备工作1、下载代码并安装必要功能包 本文代码已上传 github 期待点个star ……继续阅读 » ZEEN 5年前 (2021-04-26) 3456浏览 0评论575个赞
导言 本人第一次接触这个!有很多专业名词的确未曾了解到,如果有错误请指出,感谢! 仅仅当作学习笔记在此记录,有不严谨的地方请见谅。会将自己觉得有代表性的课后习题放上来。 ……继续阅读 » aic1999 5年前 (2021-04-26) 3561浏览 0评论120个赞
用了这么久ROS MoveIt,你真的了解它么? 你可能使用MoveIt控制过实物机器人,但是MoveIt运动规划的pipeline是什么? 你可能听说过ROS的插件机制,但是如何通过代码实现一个插……继续阅读 » 古月居官方 5年前 (2021-04-26) 2876浏览 0评论2004个赞
开源自主导航小车MickX41 ROS底盘电气系统1.1 底盘机械组装1.2 底盘硬件框图……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 1693浏览 0评论385个赞
全文框架 ……继续阅读 » WillChan_ 5年前 (2021-04-26) 2721浏览 0评论1374个赞
本文介绍手柄控制模块的代码。模块对应cabin_teleop。结合前几篇关于基础运动模块代码的解析,显然我们只需要操控手柄发布力和力矩的信息[Fx,Fy,Fz,Mx,My,Mz]即可实现对机器人的控制。如发布[10,0,0,0,0,0]即表示对机器人施加x轴方向10N的力,机器人……继续阅读 » cabinx 5年前 (2021-04-26) 3296浏览 0评论2287个赞
文章目录1. 安装依赖工具2. 源码下载编译2.1 创建ROS工程2.2……继续阅读 » 懒小象 5年前 (2021-04-26) 3047浏览 0评论1820个赞
机械臂建模分析:https://blog.csdn.net/Kalenee/article/details/81990130 MoveIt规划下的关节空间运动分析:http://www.guyuehome.com/752 ……继续阅读 » white_Learner 5年前 (2021-04-26) 3119浏览 0评论2521个赞
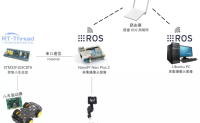
模块对应cabin_controllers/serial_to_mcu。模块实现的功能为监听网络中PWM矩阵信息,将其转换成十六进制数据通过串口下发至MCU,实现对推进器电机的控制。模块数据的串口通信借助了ros的serial工具包(sudo apt-get install ro……继续阅读 » cabinx 5年前 (2021-04-26) 2400浏览 0评论3000个赞
目录 1、什么是MAVLink……继续阅读 » autotian 5年前 (2021-04-26) 3258浏览 0评论2775个赞
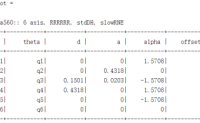
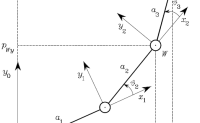
写在前面 本文所有机械臂均采用标准D-H建模法,该方法的建立过程可参考机器人学回炉重造(1):正运动学、标准D-H法与改进D……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 4195浏览 0评论1503个赞
这部分的内容,第一次看觉得很难看懂,不知所云;最近第二次看,可以看明白了。本着“先赶理论,后赶代码,借着代码复习C++”的原则,现在先不去学习代码的内容。 这一章的内容,应该先从宏观上看。第一次看的时候,就是陷入了细节,忘记了每时每刻主要是在做什么,因此看完之后不能……继续阅读 » 微鉴道长 5年前 (2021-04-26) 3310浏览 0评论1282个赞