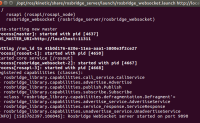
Webot 与ROS通讯1 Webot Ubuntu客户端与ROS通讯1.1 配置webots_ros包……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 3470浏览 0评论2661个赞
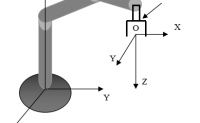
理解坐标系之间的转换关系很重要。对于刚体变换矩阵,搞机器人的朋友肯定不陌生,它一般如下表示 ……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 2342浏览 0评论2444个赞
这个系统是基于香港科技大学飞行机器人组的开源框架VINS-Mono开发的,原开源框架是针对单目SLAM。本双目SLAM系统是在原单目开源框架基础上的二次深度开发,外部接口与原框架一致。这个项目是我的研究课题项目,非商业用途,感谢HKUST的沈老师课题组提供的开源框架。该项目的gi……继续阅读 » iwande 5年前 (2021-04-26) 2039浏览 0评论1750个赞
先讨论滤波器的概念,滤波的意思是,让机器人在某个正确位置上对应的概率越高越好。也就是可以理解为:把错误位置上的概率滤低,把正确位置处的概率滤高。 假设一个机器人小R在如下场景中出现,他刚开始不知道自己在哪(小R还没看到他眼前的门),因此他在这个场景中任……继续阅读 » 郑纯然 5年前 (2021-04-26) 3242浏览 0评论324个赞
引言 前面带大家搭建了一个简单的神经网络进行曲线拟合,现在通过大家对神经网络的初步了解,我们今天将进行更深入的学习。 ……继续阅读 » 小白 5年前 (2021-04-26) 1779浏览 0评论773个赞
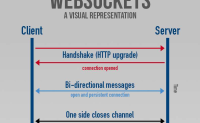
nav2djs导航组件是通过web网页来控制机器,具体而言,我们在机器人端运行导航算法等,然后再局域网下通过其他的设备端用浏览器查看机器人的地图,并通过在网页上点击的方式设定目标点引导机器人运行到指定位置,如果还对这个组件的功能有疑问的可以查看官方的演示视频:【2】或 ……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 3617浏览 0评论183个赞
这篇文章针对有一定SLAM基础的同学或者对李群李代数的应用感兴趣的数学专业同学,已经很小众了,但对于真正干这行并想要更深理解的同学可能会很有帮助,因此花了些时间整理发出来。要从理论推导到后面代码应用都读懂难度还是比较大,尽量讲解。 李群李代数其……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 1781浏览 0评论2301个赞
摘要 ROS 导航堆栈对于移动机器人从一个地方移动到另一个地方是强大的可靠。导航堆栈的工作是通过处理来自测距、传感器和环境图的数据来产生让机器人执行的安全路径。最大限度地提高此导航堆栈的性能需要对参数进行一些精细的调整,这项工作并不像看起来那么简单。如果对概念和……继续阅读 » 郑纯然 5年前 (2021-04-26) 2880浏览 0评论2234个赞
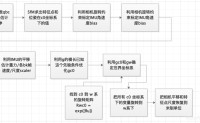
Paper阅读:Dynamic-SLAM前言Missed detection compensation algorithm(漏检补偿算法)S……继续阅读 » Hecttttttttt 5年前 (2021-04-26) 2254浏览 0评论1585个赞
……继续阅读 » iwande 5年前 (2021-04-26) 2544浏览 0评论1666个赞
新建环境模型1 新建世界模型2 添加机器人模型3 添加机器人控制器参考资料……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 2502浏览 0评论2243个赞
vins-mono刷了三遍,手写vio刷了两遍,SLAM十四讲刷了两三遍,从一开始完全看不懂是啥,不知道什么是SLAM,什么是VIO,什么是VINS,什么是SO3/SE3,甚至不知道什么是IMU…再到自己写总结写攻略,真的有很多感慨。学习开源代码的目的其实就是是为了自己能够去开发……继续阅读 » iwande 5年前 (2021-04-26) 3326浏览 0评论1315个赞
Simscape建模笔记 urdf开始讲起吧……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 2838浏览 0评论2202个赞
vins-mono保存、重载地图、evo工具测试地图保存与加载先跑起来修改地图保存的路径……继续阅读 » Hecttttttttt 5年前 (2021-04-26) 1750浏览 0评论1940个赞
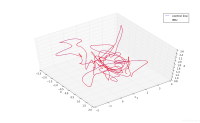
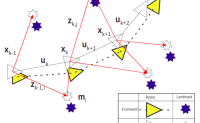
这个工具的作用就是构造一个三维的路标,再根据一系列的pose将这些路标投影到一系列照片上,也就是视频。可以用来进行VO-SLAM的仿真,也很容易拓展为VIO-SLAM的仿真工具。github地址:……继续阅读 » iwande 5年前 (2021-04-26) 1673浏览 0评论1984个赞
ROS多用户并发demo前言程序测试结果结论……继续阅读 » Hecttttttttt 5年前 (2021-04-26) 1858浏览 0评论583个赞
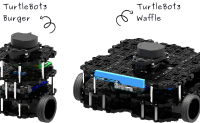
在看完自主导航小车实践的教程(自主导航小车实践)后,很多小伙伴留言说,在学习自主导航小车的时候手上没有合适的ROS机器人底盘做实验……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 2394浏览 0评论1775个赞
卡尔曼滤波的理解、推导和应用1. 卡尔曼滤波简介2. 卡尔曼滤波原理3. 卡尔曼滤波的公式……继续阅读 » JOVE 5年前 (2021-04-26) 3553浏览 0评论773个赞
嗨伙计们,我又来啦~ 上次说以后要写点儿控制的东西,思前想后纠结了好久到底要写个啥,最终决定还是先从参数辨识开始,至于结合控制理论的小demo,容我梳理一下思路再来搞吧! ……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 3269浏览 0评论1385个赞
写在前面 学习代码都记录在个人github上,欢迎关注~ 前面的博客已经写……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 2928浏览 0评论1167个赞
opencv2/nonfree的安装 看了好多讲解怎么使用openCV-contrib的nonfree模块的内容,要么整不了,要么太麻烦了,今天花了一下午的时候调试通了,……继续阅读 » iwande 5年前 (2021-04-26) 2883浏览 0评论1518个赞
卡尔曼滤波小记核心思想痛苦的证明预测……继续阅读 » Hecttttttttt 5年前 (2021-04-26) 3678浏览 0评论2589个赞
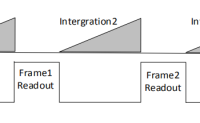
开始本文之前,先介绍几个基本概念。 1. 相机特性-曝光和读出 相机获取一帧图像分为曝光和读出两个阶段。相机使用的传感器不同,相机的曝光时间和读出时间的重叠关系也有所不同,分为交叠曝光和非交叠曝光两种。交叠曝光和非交叠曝光相……继续阅读 » 郑纯然 5年前 (2021-04-26) 2551浏览 0评论1726个赞
新建环境模型1 控制器结构2 操作函数2.1 初始化函数2.2 距离传感器操作函数2.3 ground_sensors 操……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 3238浏览 0评论2808个赞
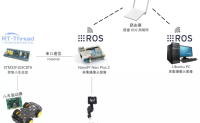
Demo测试时需要岸上PC与树莓派在同一局域网下运行,二者能进行通信。下水测试时总的设备连接大致如下图。 ……继续阅读 » cabinx 5年前 (2021-04-26) 3351浏览 0评论677个赞
这篇文章针对同一个任务进行了单线程,多线程和CUDA程序的比较。以显示GPU在并行计算上的时间节省能力。 对GPU编程不了解的同学,这篇文章可能不会有特别大的帮助,因为我不打算对CUDA编程有很详细的讲解,我浏览了一下网上,无论所英文还是中文都有了很详细的入门讲……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 3221浏览 0评论292个赞
新建机器人模型1 添加机器人本体1.1 添加Body1.2 添加机器人轮子 ……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 2577浏览 0评论1640个赞
6.初始化 第一个问题,为什么要初始化? 对于单目系统而言, (1)视觉系统只能获得二维信息,损失了一维信息(深度),所以需要动一下,也……继续阅读 » iwande 5年前 (2021-04-26) 2593浏览 0评论1151个赞
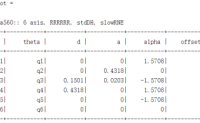
最近在看相关的课程,把作业做一下,还是蛮有意思的。 UR机械臂的物理模型文件是根据SolidWorks插件simscape导出的xml文件,课程直接提供的,博客不便给出,清楚整个建模原理就行。但个人还是觉得urdf文件好理解一些,可以人为控制各个坐标系的方向、位置还有质心的位置,……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 3532浏览 0评论1867个赞
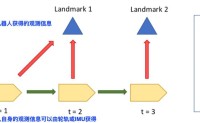
从贝叶斯推断到SLAM的数学模型贝叶斯推断SLAM数学问题简单描述滤波方式……继续阅读 » Hecttttttttt 5年前 (2021-04-26) 2593浏览 0评论1259个赞
新建机器人控制器1 新建控制器2 控制器说明3 运行效果参考资料……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 2445浏览 0评论1061个赞
一些背景知识 TSDF的主要作用是进行三维场景在计算机中的重建。目前的那些中文博客与成熟的TSDF应用其实还有差距,故写此文。 视觉SLAM应用的一个分支为Dense SLAM。简单来说就是在定位机器人的同时对周围的环境进行(近……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 1787浏览 0评论561个赞
基于车辆模型的横向控制方法1. 简介1.1. 无人驾驶车辆1.2. 横向控制和纵向控制1.3.……继续阅读 » JOVE 5年前 (2021-04-26) 3468浏览 0评论1040个赞
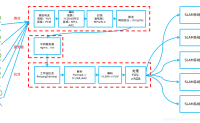
水下平台,如ROV,AUV等的机械结构通常会随着配件的变化而变化。比如,改变推进器的布局,添加重量比较大的传感器等。机械结构的变化反过来会影响运动控制。因此,在设计软件架构时,将机械参数在程序中写死是非常不合理的。根据机械模型设计配置文件,供程序加载是比较理想方案。 ……继续阅读 » cabinx 5年前 (2021-04-26) 1812浏览 0评论530个赞
6.2 代码解析 这部分代码在e……继续阅读 » iwande 5年前 (2021-04-26) 3296浏览 0评论1556个赞
语义分割经典网络:全卷积神经网络(FCN)&U-netFCN解决问题将全连接层替换为卷积层……继续阅读 » Hecttttttttt 5年前 (2021-04-26) 1617浏览 0评论2380个赞
课程目的: 自动驾驶是汽车产业与人工智能、物联网、高性能计算等新一代信息技术深度融合的产物,是当前全球汽车与交通出行领域智能化和网联化发展的主要方向,已成为各国争抢的战略制高点。 ……继续阅读 » 古月居官方 5年前 (2021-04-26) 3325浏览 0评论430个赞
键盘控制小车1. 新建C++控制器2. 代码说明3. 演示效果参考资料……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 2162浏览 0评论927个赞
ROS笔记(2) Kinetic 的安装和配置1. Ubuntu16.04的安装2. ROS Kinetic 安装3. ROS 多机通讯设置……继续阅读 » JOVE 5年前 (2021-04-26) 2297浏览 0评论769个赞
7.后端非线性优化 7.1 理论基础 ……继续阅读 » iwande 5年前 (2021-04-26) 2439浏览 0评论128个赞
最近发现身边的一些初学者朋友捧着各种pytorch指南一边看一边敲代码,到最后反而变成了打字员。 敲完代码一运行,出来结果和书上一对比,哦,是书上的结果,就翻到下一章。半天就能把一本书都打完,但是合上书好像什么都不记得。有的甚至看了……继续阅读 » 微鉴道长 5年前 (2021-04-26) 3211浏览 0评论2084个赞
在tsdf的第一讲里我们讲解了最基本的TSDF重构算法。也提出了算法的一些不足之处。 ……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 2981浏览 0评论2680个赞
双臂Matlab仿真建模文章目录双臂Matlab仿真建模……继续阅读 » OpenRobotSL 5年前 (2021-04-26) 3627浏览 0评论423个赞
添加GPS传感器1. 添加GPS实体2. 添加GPS 控制接口代码3. 运行效果参考资料……继续阅读 » 熊猫飞天 5年前 (2021-04-26) 2804浏览 0评论2555个赞
7.2 代码 在estimator.cpp的processImage()的最后,代码如下: else//solver_flag = NON_……继续阅读 » iwande 5年前 (2021-04-26) 3786浏览 0评论1963个赞