学习打开摄像头捕获照片、播放本地视频、录制视频等。 目标: 打开摄像头并捕获照片 播放本地视频,录制视频 OpenCV函数:cv2.VideoCapture(), cv2.Vid……继续阅读 » 一三五 5年前 (2021-04-26) 3340浏览 0评论2365个赞
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达、IMU、麦克风、音响、摄像头这些通用部件可以直接买到,很难买到通用的底盘。一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的;另一方面是因为底盘包含软硬件整套解决方案,是很多机器人公司的核心技术,一般不……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3254浏览 0评论110个赞
一、概述 所谓嵌入式,其实就是专用的微型计算机系统,包括嵌入式硬件和嵌入式软件两个部分。嵌入式硬件通常是由32位(或以下)的微处理器及其相关外设组成;嵌入式软件则是写入嵌入式硬件的用于实现特定功能的程序。笔者总结了一下,嵌入式具……继续阅读 » Shawn0102 5年前 (2021-04-26) 3341浏览 0评论2251个赞
一、IKFAST 简介 IKFAST是一种基于解析算法的运动学插件,可以保证每次求解的一致性。……继续阅读 » Steve_long 5年前 (2021-04-26) 3359浏览 0评论112个赞
……继续阅读 » Steve_long 5年前 (2021-04-26) 2286浏览 0评论988个赞
今日份的ROS暑期学校讲座圆满结束,各位老师们辛苦了!也非常感谢同学们的热情参与! 每天24:00前进入当天的直播间……继续阅读 » 古月居官方 5年前 (2021-04-26) 1732浏览 0评论1445个赞
效果 ……继续阅读 » 很不专业 5年前 (2021-04-26) 1960浏览 0评论243个赞
……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 2790浏览 0评论1024个赞
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达、IMU、麦克风、音响、摄像头这些通用部件可以直接买到,很难买到通用的底盘。一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的;另一方面是因为底盘包含软硬件整套解决方案,是很多机器人公司的核心技术,一般不……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3411浏览 0评论2043个赞
一、ArUco简介 ……继续阅读 » Shawn0102 5年前 (2021-04-26) 3058浏览 0评论2558个赞
前言 紧张刺激的ROS组全国总决赛于26号落下了帷幕。我也有幸能够前往现场参赛体验一番。下面给大家带来一些现场的照片,视频,末尾会对路径算法进行……继续阅读 » 小白 5年前 (2021-04-26) 3478浏览 0评论1531个赞
今日份的ROS暑期学校讲座圆满结束,各位老师们辛苦了!也非常感谢同学们的热情参与! 每天24:00前进入当天的直播间学习即签到成功,连续签到6天,即可获得领取……继续阅读 » 古月居官方 5年前 (2021-04-26) 1597浏览 0评论2022个赞
总结下gazebo的常见问题。不全,会经常更新的,有其他问题可以在评论区指出,通用问题会加到文章中。 虚拟机打开gazebo黑屏……继续阅读 » 谦墨 5年前 (2021-04-26) 2179浏览 0评论1255个赞
最近真的快自闭了,因为手贱残害了n个芯片,最后项目以失败告终,等9月份画出新板子再继续项目,今天开始,我们学习Arduino的程序结构和基础知识,通过本文的学习,可以学习到Ard……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 2529浏览 0评论1024个赞
前言 本文讲解如何在游戏欧卡2中使用深度学习框架实现无人驾驶,为什么选择欧卡2?虽然ROS中也有真实汽车的仿真环境但是世界场景过于简单,而游戏欧……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2110浏览 0评论965个赞
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达、IMU、麦克风、音响、摄像头这些通用部件可以直接买到,很难买到通用的底盘。一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的;另一方面是因为底盘包含软硬件整套解决方案,是很多机器人公司的核心技术,一般不……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 1916浏览 0评论2544个赞
将视频按照一定的帧率转化为图片,与PotPlayer进行对比,发现相同的设置,本文代码比PotPlayer保存的图片清晰度高。 代码如下: #-*- c……继续阅读 » 一三五 5年前 (2021-04-26) 3050浏览 0评论2625个赞
前言 因为我做《ros机器人编程实践》书上789章之前用的turtlebot3实践的,turtlebot3用的是激光雷达传感器,12章的巡线机器人用到了深度摄像头,所有无奈又只好装了turtlebot第一代来实验。 ros:kinetic Ubun……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2100浏览 0评论1881个赞
一、第一个ArUco的视觉应用 首先介绍第一个视觉应用的Demo,这个应用场景比较简单,下面具体介绍: 1. 应用场景 主线程:通过摄像头检测环境中的视觉标志,看到ID为100的标志后在图像中圈出标志,在标志……继续阅读 » Shawn0102 5年前 (2021-04-26) 1801浏览 0评论609个赞
参考文章:https://www.cnblogs.com/shizhengwen/p/8719062.html一、读入图像……继续阅读 » 一三五 5年前 (2021-04-26) 2716浏览 0评论1956个赞
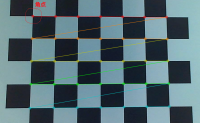
相机的标定是所有人走进视觉世界需要做的第一件事,辣么多的视觉标定原理解释你可以随便在网上找到,这里只讲到底如何去实现,也算是给刚入门的朋友做个简单的分享。 1.单目相机标定的工程源码 首先请到同性交友网站Github上下载工程源码(……继续阅读 » Shawn0102 5年前 (2021-04-26) 2370浏览 0评论2659个赞
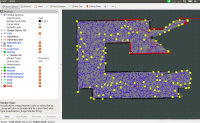
准备工作 rbgdslam_v2 按照github ,实验环境Ubuntu 16.04, ROS kinetic 如果你电脑安装PCL版本是1.7,那么请直接跳到错误1,如果你……继续阅读 » 很不专业 5年前 (2021-04-26) 1905浏览 0评论378个赞
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达、IMU、麦克风、音响、摄像头这些通用部件可以直接买到,很难买到通用的底盘。一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的;另一方面是因为底盘包含软硬件整套解决方案,是很多机器人公司的核心技术,一般不……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3348浏览 0评论764个赞
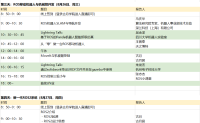
2020的ROS暑期学校讲座已圆满结束,各位老师们辛苦了!也非常感谢同学们的热情参与!6天+30位分享者今年,由于疫情影响,……继续阅读 » 古月居官方 5年前 (2021-04-26) 3081浏览 0评论2549个赞
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达、IMU、麦克风、音响、摄像头这些通用部件可以直接买到,很难买到通用的底盘。一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的;另一方面是因为底盘包含软硬件整套解决方案,是很多机器人公司的核心技术,一般不……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 1867浏览 0评论2408个赞
前言 接上篇博客:ros机器人编程实践(12.1)- 用turtlebot仿真巡线机器人 <……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 3641浏览 0评论2165个赞
1、前记: 此篇说说利用如何在Matlab中进行机器人轨迹规划(Trajectory Planning)。先利用机器人工具箱(Robotics Toolbox)函数……继续阅读 » 二民院小学生 5年前 (2021-04-26) 2138浏览 0评论2299个赞
一. 代码下载 代码Github主页:https://github.com/leggedrobotics/darknet_ros ……继续阅读 » 很不专业 5年前 (2021-04-26) 2565浏览 0评论2912个赞
手把手教你从零开始控制各种自由度的机械臂……继续阅读 » 古月居官方 5年前 (2021-04-26) 3451浏览 0评论1824个赞
opencv单独打开摄像头或者打开本地视频请参考:《Python+OpenCV教程3:打开摄像头》 本篇介绍在pyqt中打开摄像头并进行显示,……继续阅读 » 一三五 5年前 (2021-04-26) 2072浏览 0评论1759个赞
……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 3390浏览 0评论2479个赞
摘要 通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识。接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发。本章将从树莓派3的开发环境搭建入手,为后续ros开发、slam导航及语音交互算法做准备。本章内容: ……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3349浏览 0评论161个赞
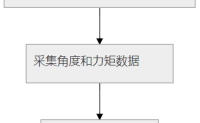
Hello! 欢迎来到我的博客 今天的内容关于机器人中常用的传感器IMU,我们用它来实现机器人姿态、速度、位置的估计。 今天将会介绍使用低成本IMU进行机器人运动估计的一个常用方法——ESKF。……继续阅读 » 西涯先生 5年前 (2021-04-26) 2664浏览 0评论1999个赞
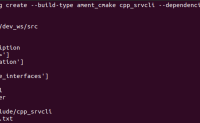
节点之间通过服务通信时,发送请求的一端称之为客户端(Client),应答的一端称之为服务器(Server),请求和应答的数据结构使用srv文件描述。 接下来我们就尝试实现一个简单的服务通信模型,客户端发送两个加数,服务器完成加数求和之后应答求和结果。 1.……继续阅读 » 古月 5年前 (2021-04-26) 2719浏览 0评论520个赞
摘要 通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识。接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发。本章将从树莓派3的开发环境搭建入手,为后续ros开发、slam导航及语音交互算法做准备。本章内容: 1.安装系统……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2967浏览 0评论2500个赞
问题简述 操作系统:Ubuntu18.04 ROS版本:melodic 笔者在很长一段时间里,由于自身电脑问题,只能通过……继续阅读 » 吴凯荣 5年前 (2021-04-26) 2481浏览 0评论419个赞
仿真机器人加真实机器人功能包下载链接https://download.csdn.net/download/qq_4214……继续阅读 » 很不专业 5年前 (2021-04-26) 2605浏览 0评论861个赞
Hello! 欢迎来到我的博客 今天的内容关于机器人中常用的传感器IMU,我们用它来实现机器人姿态、速度、位置的估计。 今天将会介绍使用低成本IMU进行机器人运动估计的一个常用方法——ESKF。 3 ……继续阅读 » 西涯先生 5年前 (2021-04-26) 3650浏览 0评论1195个赞
很荣幸能作为古月居和亚马逊联合开发的云实践仿真平台的内测人员和大家分享我在操作过程中的经验。 今天接到古月老师的通知后,我就迫不及待的登录了云实践平台,第一个任务是运行《hello world例程熟悉云实践平台》。 在没有真正上手操作之前我以为会有多么的困难,我甚至……继续阅读 » 旧街旧巷等旧人 5年前 (2021-04-26) 2498浏览 0评论549个赞
摘要 通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识。接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发。本章将从树莓派3的开发环境搭建入手,为后续ros开发、slam导航及语音交互算法做准备。本章内容: 1.安装系统……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2455浏览 0评论2636个赞
前言 这一节玩一玩ros中的fetch机器人,和它相似的是pr2机器人,pr2有两条胳膊。 fetch: ……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2538浏览 0评论133个赞
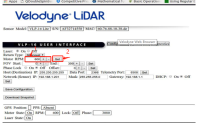
参考文献: http://wiki.ros.org/velodyne/Tutorials/Getting%20Started%20with%20the%20Velodyne%20VLP16 https://blog.csdn.net/zz2862625……继续阅读 » 一三五 5年前 (2021-04-26) 2662浏览 0评论2329个赞
故事的发展由来 一天一位萌新摸索着提出了一个问题: “你好,我想学XXX,应该从什么学起啊” 我的回答:“安装环境。” ……继续阅读 » cungudafa 5年前 (2021-04-26) 1855浏览 0评论648个赞
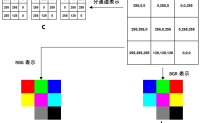
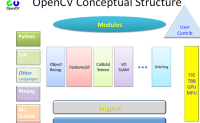
1 概述 – OpenCV介绍与环境搭建 ……继续阅读 » 芝士奶盖 5年前 (2021-04-26) 1603浏览 0评论2618个赞
摘要 通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识。接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发。本章将从树莓派3的开发环境搭建入手,为后续ros开发、slam导航及语音交互算法做准备。本章内容: 1.安装系统……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2540浏览 0评论436个赞