想玩全向小车么?想搭建一个移动底盘么?想满足中二病的创造欲么? 想? 那么为什么不自己做一个麦克纳……继续阅读 » tloinny 5年前 (2021-04-26) 2952浏览 0评论2011个赞
一阶贝塞尔曲线(包含两个控制点)假设控制点为P0和P1,曲线方程为: ……继续阅读 » 西涯先生 5年前 (2021-04-26) 3479浏览 0评论2753个赞
……继续阅读 » 古月居官方 5年前 (2021-04-26) 1581浏览 0评论324个赞
关于大佬们的一些见解 ……继续阅读 » 南山二毛 5年前 (2021-04-26) 1838浏览 0评论370个赞
随着3D相机的普及和3D激光传感器价格的降低,机器人依靠3D传感器视觉避障和路径规划方案逐渐成为趋势。近期采用3D相机进行了路径规划的仿真和实测。……继续阅读 » 南山二毛 5年前 (2021-04-26) 3145浏览 0评论1218个赞
马斯克的龙飞船中的操作系统是Linux,软件工程使用的是C++,用GCC和GDB去调试代码,C++如此强大和灵活,所以有必要了解一下C++工程是如何make的. 我们在写CMakeLists.txt时候需要查找第三方库的头文件和……继续阅读 » 南山二毛 5年前 (2021-04-26) 3323浏览 0评论1515个赞
转载自:http://emuch.net/html/201009/2……继续阅读 » 南山二毛 5年前 (2021-04-26) 2793浏览 0评论1507个赞
……继续阅读 » 古月居官方 5年前 (2021-04-26) 1585浏览 0评论865个赞
上期回顾:RT-Thread智能车目标识别系统连载教程—……继续阅读 » RT-Thread 5年前 (2021-04-26) 3490浏览 0评论382个赞
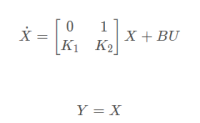
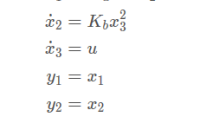
本文介绍了如何利用MATLAB辨识状态空间方程中的未知参数。 假设我们的被控系统的表达如下: ……继续阅读 » 西涯先生 5年前 (2021-04-26) 3587浏览 0评论1268个赞
原理对于ROS里面用Python写的节点,是可以直接用 python your_node_name<……继续阅读 » 西涯先生 5年前 (2021-04-26) 2853浏览 0评论2318个赞
……继续阅读 » 西涯先生 5年前 (2021-04-26) 2060浏览 0评论2577个赞
上一回,我们讲完了A*的工作原理,与Dijkstar相比A*确实有一……继续阅读 » tloinny 5年前 (2021-04-26) 1849浏览 0评论2391个赞
上期回顾:RT-Thread智能车目标识别系统连载教程——手写体识别模型 (1)……继续阅读 » RT-Thread 5年前 (2021-04-26) 2986浏览 0评论1142个赞
1. 原理1.1 AB相编码器 ……继续阅读 » 西涯先生 5年前 (2021-04-26) 1990浏览 0评论2322个赞
导言你也在机器人动力学仿真过程中,遭遇了许多BUG吗? 没关系,在这里或许能找到你想要的答案! 正文先来考虑一个很简单的情况,假设有一个椭……继续阅读 » 西涯先生 5年前 (2021-04-26) 2655浏览 0评论2485个赞
参考代码:https://github.com/christianwengert/calib_toolbox_addon<……继续阅读 » 南山二毛 5年前 (2021-04-26) 3549浏览 0评论1615个赞
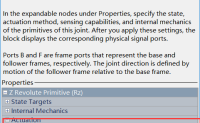
全文目录什么是RQT?一个RQT Plugin的工程目录各文件详细说明程序运行逻辑编写RQT插件的具体操作步骤<……继续阅读 » 西涯先生 5年前 (2021-04-26) 2807浏览 0评论376个赞
快速随机搜索树(Rapidly-Exploring Random Tree, RRT)算法是移动机器人或机械臂常用的轨迹规划算法,用于规划出一条运动轨迹。其主要步骤分以下几步: 1. 初始化需要规划的2D或3D地图,给出移动机器人或机械臂要运动的起点和终点坐标,树的根部在起点。 ……继续阅读 » 古月光翟氵青 5年前 (2021-04-26) 1919浏览 0评论2809个赞
全文目录什么是RQT?一个RQT Plugin的工程目录各文件详细说明程序运行逻辑编写RQT插件的具体操作步骤<……继续阅读 » 西涯先生 5年前 (2021-04-26) 3518浏览 0评论2594个赞
上期回顾:RT-Thread智能车目标识别系统连载教程——手写体识别模型 (1)……继续阅读 » RT-Thread 5年前 (2021-04-26) 2015浏览 0评论1246个赞
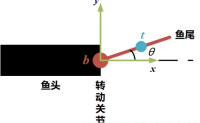
两连杆机器鱼的简单建模方法在机器鱼的建模过程中,无可避免地会遇到一个问题,那就是: 机器鱼的推进力是如何产生的呢?……继续阅读 » 西涯先生 5年前 (2021-04-26) 2295浏览 0评论355个赞
工具和参考链接由于机器人动力学模型往往都是非线性的,这里用到的工具是: MATLAB的System Identification Toolbox(系统辨识工具箱),其中的Nonlinear Grey-Box……继续阅读 » 西涯先生 5年前 (2021-04-26) 3273浏览 0评论2343个赞
经常有小伙伴在古月居后台咨询ROS安装和上手使用的问题,相信使用过ROS的同学们都深有体会吧: 1.rosdep为啥总是报错,换网、换源、换电脑,怎么都解决不了?2.ros安装也太慢了吧,看着不到KB级的下载速……继续阅读 » 古月 5年前 (2021-04-26) 3225浏览 0评论915个赞
1、前记:可能用Robotics Toolbox建立的机器人模型与实际机器人在外观上存在天壤之别吧,直接将CAD软件(UG、SolidWorks、CATIA、Proe等)做好的3D模型导入MATLAB中是一个很好的选择……继续阅读 » 二民院小学生 5年前 (2021-04-26) 2871浏览 0评论2772个赞
1、前记按照一定的套路,在开篇之前先如下方式开车—自行车(自己学习的总结)。 在之前的博客中写到了一些MATLAB环境下使机器人可视化,并做控制。如: ……继续阅读 » 二民院小学生 5年前 (2021-04-26) 3594浏览 0评论2584个赞
1、前言:MATLAB下机器人可视化与控制—simulink篇(1)主要内容:是利用 s……继续阅读 » 二民院小学生 5年前 (2021-04-26) 3374浏览 0评论1897个赞
前言本来想直接用百度智能车比赛的数据集训练,但是发现在ROS中搭建红绿灯模型和提供的数据集在颜色亮度外形上都有点差别… …无奈从创建数……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 1726浏览 0评论2853个赞
前言第一节: 基于paddledetecti……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 1806浏览 0评论227个赞
前言第一节: 基于paddledetecti……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2899浏览 0评论2460个赞
……继续阅读 » 古月 5年前 (2021-04-26) 3166浏览 0评论926个赞
1、前记先提一下,在这篇MATLAB机器人可视化文章中提到了如何使CAD模型的……继续阅读 » 二民院小学生 5年前 (2021-04-26) 3276浏览 0评论1731个赞
1、来源论坛里的帖子,主要是回答如何通过Robotstudio来获取ABB机器人的D-H参数。对话内容(复制粘贴):Hej Hej, My name is Nikolas and I am resea……继续阅读 » 二民院小学生 5年前 (2021-04-26) 1760浏览 0评论1493个赞
……继续阅读 » 古月 5年前 (2021-04-26) 3204浏览 0评论2996个赞
1、将 CAD 和 URDF 多体模型导入Simscape Multibody环境中。从第三方应用程序导入多体模型, 以便在Simscape多体环境中进行模拟、设计和分析任务。可以使用 ……继续阅读 » 二民院小学生 5年前 (2021-04-26) 2254浏览 0评论2193个赞
1、前记:续写MATLAB下机器人可视化与控制—simulink篇(2),……继续阅读 » 二民院小学生 5年前 (2021-04-26) 2763浏览 0评论1968个赞
前言:续写一知半解系列,在上一篇中相信对大家对GUI的控件操作和与Simulink数据传递比较熟悉了。这篇主要解决下上次留下的问题。主要包括 :(1)GUI界面其他控件说明。包括运行时间,工具箱机器人显示和末端位姿计算显示,利……继续阅读 » 二民院小学生 5年前 (2021-04-26) 3390浏览 0评论2819个赞
上一篇文章《如何在gazebo中实现多机器人仿真》,介绍了如何在仿真环境gazebo中同时加载多个机器人,并且实现同时控制或单独控制。而在gazebo中加载多个机器人仅仅是多智能体协同控制研究的第一步,这次的文章将介绍如何在ROS操作系统下,gazebo仿真环境中实现基本的多机器……继续阅读 » 付雷雷 5年前 (2021-04-26) 2350浏览 0评论2137个赞
前面的文章分别介绍了如何在Gazebo中实现多机器人仿真以及多移动机器人编队的研究。在ROS中,rviz也是开发者们常用到的一款数据可视化工具。ROS中有很多的数据,包括地图数据、图像数据等,数据形态往往不利于开发者感受其描述的内容,所以常常需要将数据可视化显示,Rviz就是针对……继续阅读 » 付雷雷 5年前 (2021-04-26) 3174浏览 0评论2408个赞
前几篇文章中分别讲了如何在gazebo中加载多机器人,在gazebo中多机器人的编队以及如何在rviz中实现多机器人仿真。这一篇文章的主要内容是将前几篇文章所讲内容做一个集合,实现在ROS环境下的多机器人导航加编队的仿真。 ……继续阅读 » 付雷雷 5年前 (2021-04-26) 3385浏览 0评论1666个赞
说明 机械臂末端执行器的种类很多,目前针对目标抓取最常使用的末端执行器就是夹抓和真空吸盘式。但是在gazebo仿真中,需要对抓取目标……继续阅读 » 神秘老铁 5年前 (2021-04-26) 3848浏览 0评论1027个赞
在学习ROS的过程中,有一步是永远也省不了的,那就是搭建ROS环境。回忆当年,起初我是用的虚拟机进行安装学习,但是会有各种各样驱动上的bug,网络配置也会有一些问题,感觉附加问题比较多。之后便改用双系统,然而第一次安装双系统的时候,也是遇到了一些问题,分盘、引导之类的也……继续阅读 » 谦墨 5年前 (2021-04-26) 1847浏览 0评论919个赞
作为航空航天类专业毕业,马上要入机器人坑、直博坑的小本科生,要来写这样一个系列的文章,我感到诚惶诚恐。不过,人还是得有一些追求的,写这样一系列文章很难,但是相信对我自己的提升也会不少。当然,作为一名资深小白,出点错误、理解得不透彻的情况很有可能会在这个系列的文章中屡屡出现,……继续阅读 » 西涯先生 5年前 (2021-04-26) 3081浏览 0评论323个赞
1、前记:在MATLAB机器人可视化中提到过可以将含有URDF的机器人文件和对应stl格式部件导入到matlab并做运动控制。这一方面的资料真心少,从例子和帮助文档中学习太幸苦了。一些函数用法(……继续阅读 » 二民院小学生 5年前 (2021-04-26) 2421浏览 0评论358个赞
1、前记:在继Robot……继续阅读 » 二民院小学生 5年前 (2021-04-26) 3438浏览 0评论1919个赞