从“柳树车库”直接衍生出的公司正在改变着世界。一些前期的公司包括:hiDOF:机器人与自动化软件咨询公司,2013被Google收购。IPI(Industrial Perception Inc.):利用视觉辅助工业机械臂搬运货物,2013……继续阅读 » 张新宇 5年前 (2021-04-26) 2775浏览 0评论537个赞
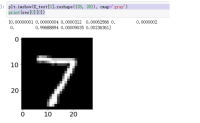
上期回顾: RT-Thread智能车目标识别系统连载教程——手写体……继续阅读 » RT-Thread 5年前 (2021-04-26) 2754浏览 0评论505个赞
ROS2在基本概念上与ROS1相似,但是实现上差别较大,比如编程规范等。上一节是主题实战,有兴趣可以编写代码实现机器人速度发布和坐标订阅。……继续阅读 » zhangrelay 5年前 (2021-04-26) 3319浏览 0评论455个赞
磨蹭了好久终于开始写本行SLAM系列了。鄙人目前水平一般,但接下来的几年也都会在这个方向继续深入下去,所以打算尽我所能地写一个完整的SLAM从入门到精(fang)通(qi)的系列。文章的内容大概会分为三个大部分:&nb……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 3401浏览 0评论1232个赞
前言本文所使用的仿真软件是开源的Rotors包,仅供学习使用!然后这里说明下,只是个人爱好仿真下无人机玩玩,对官方给的无人机控制代码理……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2274浏览 0评论2625个赞
本文参考Moveit官方教程,原文链接见文末。已经过本人踩坑验证:系统版本:ubuntu16.04ROS版本:Kinetic ……继续阅读 » 小明工坊 5年前 (2021-04-26) 2059浏览 0评论641个赞
前言 如果是第一次使用Moveit!,建议先按照 ……继续阅读 » 小明工坊 5年前 (2021-04-26) 1974浏览 0评论378个赞
PX4无人机ROS下仿真开发OverviewSi……继续阅读 » bingobinlw 5年前 (2021-04-26) 1734浏览 0评论489个赞
文件目录结构├─Annotation │ └─XML文件 ├─data │ ├─csv文件 │ └─Record文件 ├─images │ └─图片 ├……继续阅读 » white_Learner 5年前 (2021-04-26) 3031浏览 0评论2504个赞
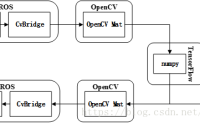
环境:Ubuntu16.04+Tensorflow-cpu-1.6.0+ROS Kinetic+OpenCV3.3.1前期准备:完成Object Detecti……继续阅读 » white_Learner 5年前 (2021-04-26) 1633浏览 0评论623个赞
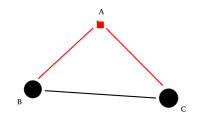
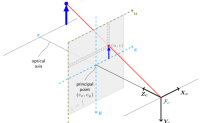
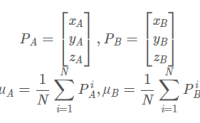
相机标定是用于获取相机畸变,内参数和外参数的一个操作,是机器视觉中不可或缺的一个重要步骤。 畸变是相机因其自身成像特性无法避免产生的图像变形。内参数是对相机内部特性的描述,包括相机图像中心、相机焦距等。外参数描述的是相机在世界坐……继续阅读 » white_Learner 5年前 (2021-04-26) 1787浏览 0评论151个赞
1 搭建无人机仿真环境 首先需要安装mavros,这是一个飞机固件与ros通信的包: ……继续阅读 » 神秘老铁 5年前 (2021-04-26) 3660浏览 0评论1610个赞
robot_localization是基于卡尔曼滤波在ROS系统上比较成熟、应用比较广泛的一个机器人动态定位软件包。robot_localization软件包中使用的定位算法并不是最时新最优秀的,但是它具备几个不可替代的优势:<……继续阅读 » 天马微云 5年前 (2021-04-26) 2579浏览 0评论1481个赞
行动(action)比服务更为灵活和复杂。在给出行动具体说明之前,先简要复习一下:主题-服务-行动: ……继续阅读 » zhangrelay 5年前 (2021-04-26) 2735浏览 0评论2443个赞
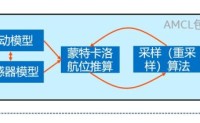
AMCL是ROS/ROS2系统中最官方的定位模块,是导航模块中唯一指定的定位算法。在ROS/ROS2系统中,乃至整个移动机器人领域都是举足轻重的重要地位。虽然陆续也有许多其它的定位算法出现,但是在ROS/ROS2系统中,目前也仅仅……继续阅读 » 天马微云 5年前 (2021-04-26) 3156浏览 0评论2202个赞
现在人工智能的方案很多,也并应用到很多的领域去了,我这里并不对这些方面展开。我只对在机器人领域,特别是ROS以及ROS2系统上融合的一些人工智能方案跟平台做一定程度的归纳、总结。其次,即使在机器人应用方面,在此之前的……继续阅读 » 天马微云 5年前 (2021-04-26) 2090浏览 0评论2957个赞
……继续阅读 » 古月 5年前 (2021-04-26) 3677浏览 0评论981个赞
大家好,最近有其他事情耽搁了更新。今天给大家继续一知半解的系列4。在上一篇博客中我们已经演示了如何利用Simulink中的Slider Gain模块和Siganl Build模块对机器人进行简单运动控制。今天简单的介绍机器人独立关节的位置PID控制,并演示一下如何使用GUI……继续阅读 » 二民院小学生 5年前 (2021-04-26) 1781浏览 0评论740个赞
相机标定(一)——内参标定与程序实现相机标定(二)——图像坐标与世界坐标转换……继续阅读 » white_Learner 5年前 (2021-04-26) 2046浏览 0评论859个赞
关于2维的SLAM我们主要讲解两个算法,基本都源于。第一是基于滤波的扩展卡尔曼滤波SLAM,第二是基于图优化SLAM。前者现在基本上已经没有实际使用了,实际的应用3d的SLAM也基本是基于后者的。但扩展卡尔曼滤波S……继续阅读 » 陈瓜瓜 5年前 (2021-04-26) 2689浏览 0评论1351个赞
相机标定(一)——内参标定与程序实现相机标定(二)——图像坐标与世界坐标转换……继续阅读 » white_Learner 5年前 (2021-04-26) 2671浏览 0评论1096个赞
相机标定(一)——内参标定与程序实现……继续阅读 » white_Learner 5年前 (2021-04-26) 2603浏览 0评论1675个赞
本文参考Moveit!官方文档。 系统:ubuntu 18.04 / 16.04 ROS:Melodic / Kinetic概述基于python的运动组API是最简单的……继续阅读 » 小明工坊 5年前 (2021-04-26) 1919浏览 0评论464个赞
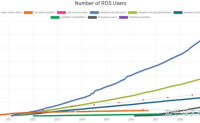
关注于机器人行业的人,大抵或多或少地了解过ROS。ROS是机器人操作系统的简称,是目前世界上最火的开源机器人研发框架,已经被成功部署到了许多的机器人产品当中。 ROS社区是ROS开发者、使用者、学习者等等ROSer们在线互动的平……继续阅读 » 天马微云 5年前 (2021-04-26) 3014浏览 0评论2488个赞
环境:Ubuntu16.04+ROS Kinetic 一、kinect v1简介Kinect v1深度相机拥有一个RGB彩色摄像头,一个红外线CMOS摄像机和一个红外发射器。相机的红外线CMOS……继续阅读 » white_Learner 5年前 (2021-04-26) 3784浏览 0评论199个赞
前言本节教程演示UUV的一些玩法,基于开源项目UUV,官方介绍文档:……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 4158浏览 0评论2117个赞
原作者:Evan Ackerman文章来源:IEEE ……继续阅读 » 古月 5年前 (2021-04-26) 3103浏览 0评论372个赞
本章进入最为激动的机器人自主导航的学习,将围绕机器人SLAM建图、导航避障、巡航、监控等内容展开。本章内容: 在机器人上使用传感器google-cartog……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2457浏览 0评论2332个赞
这是一篇面向神马都不懂的小白玩家的PCB设计教程。希望能帮助大家快速上手PCB的设计。1 预备知识1.1 常用工具做图工具:Altium DesignerPCB板加工:嘉立……继续阅读 » 西涯先生 5年前 (2021-04-26) 2990浏览 0评论707个赞
通过前面的基础学习,本章进入最为激动的机器人自主导航的学习。在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命。本章将围绕机器人SLAM建图、导航避障、巡航、监控等内容展开。本章内容: 在机器人上使……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2450浏览 0评论474个赞
前言在上一篇文章中,我们了解了用于表示机器人……继续阅读 » 西涯先生 5年前 (2021-04-26) 3016浏览 0评论2075个赞
滤波理论在机器人状态估计里的重要性不言而喻,因此对滤波理论进行系统的了解非常有必要。本篇文章目的是从贝叶斯滤波(BF)的角度来串联现在流行的几种滤波方法:卡尔曼(KF)、扩展卡尔曼(EKF)、无迹卡尔曼(UKF)、粒子滤波(PF)等。……继续阅读 » 西涯先生 5年前 (2021-04-26) 2162浏览 0评论403个赞
通过前面的基础学习,本章进入最为激动的机器人自主导航的学习。在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命。本章将围绕机器人SLAM建图、导航避障、巡航、监控等内容展开。本章内容: ……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3179浏览 0评论611个赞
……继续阅读 » 古月居官方 5年前 (2021-04-26) 3382浏览 0评论208个赞
上一篇文章里介绍了贝叶斯滤波的理论框架,知道了贝叶斯滤波假设了机器人的状态服从某个概率分布,并且知道了如何利用Bayes公式对其概率分布更新。然而,前面的内容仅仅是介绍了其完美的数学原理,实际计算起来却并不适用。在这篇文章中,就将介绍如何通过一系列假设去简化……继续阅读 » 西涯先生 5年前 (2021-04-26) 3433浏览 0评论1198个赞
通过前面的基础学习,本章进入最为激动的机器人自主导航的学习。在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命。本章将围绕机器人SLAM建图、导航避障、巡航、监控等内容展开。本章内容: 在机器人上使……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 3569浏览 0评论551个赞
前面两篇文章里首先介绍了贝叶斯滤波的理论框架,之后对机器人模型做了线性高斯假设,推出了卡尔曼滤波的迭代方程组。在这篇文章中,就将进一步介绍当机器人模型为非线性时该如何使用贝叶斯滤波。我们将介绍扩展卡尔曼滤波器以及无迹卡尔曼滤波器的由来。 ……继续阅读 » 西涯先生 5年前 (2021-04-26) 2528浏览 0评论1376个赞
2020年,Ubuntu最新的LTS版本20.04如期而至,古月君早就摩拳擦掌想要尝试一下,今天就大胆来一次硬盘安装。 笔记本型号:小米15.6 Pro 原系统环境:Windows ……继续阅读 » 古月 5年前 (2021-04-26) 3192浏览 0评论503个赞
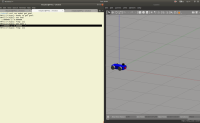
嗨伙计们,罗伯特祥又来和大家见面了! 最近,很多小伙伴私信我,问我到底应该使用哪款仿真器来仿真,所以笔者临时决定结合自己的使用经历写篇科普文跟大家一起来分析对比一下Ga……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 3462浏览 0评论844个赞
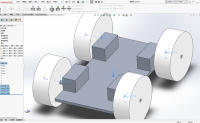
机器人专业的学生,多多少少总需要和机械结构打点交道。有时候可能是做个安装设备的架子,有时候可以需要个简单的运动机构,这些简单的东西如果找别人做就会耽误很长的一段时间。这个时候掌握一点Solidworks绘图技能,你的苦恼就消失啦。 <……继续阅读 » 西涯先生 5年前 (2021-04-26) 2499浏览 0评论702个赞
通过前面的基础学习,本章进入最为激动的机器人自主导航的学习。在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命。本章将围绕机器人SLAM建图、导航避障、巡航、监控等内容展开。本章内容: 在机器人上使……继续阅读 » 小虎哥哥爱学习 5年前 (2021-04-26) 2345浏览 0评论248个赞
原作者:Evan Ackerman文章来源:IEEE ……继续阅读 » 古月 5年前 (2021-04-26) 1972浏览 0评论823个赞
0.三轮全向移动平台简介在机器人硬件的大家族中,移动平台算是占据了一席之地,近几年在各类大大小小的机器人比赛中使用三轮全向移动平台的频率越来越高,这种有意思的结构似乎越来越受机器人爱好者的青睐。 三轮全向移……继续阅读 » tloinny 5年前 (2021-04-26) 2813浏览 0评论991个赞
0. 麦克纳姆轮全向移动平台简介麦克纳姆……继续阅读 » tloinny 5年前 (2021-04-26) 3303浏览 0评论2641个赞
Qt Creator for ROS如果想在Qt上进行ros包的开发和GUI界面开发,……继续阅读 » 南山二毛 5年前 (2021-04-26) 3268浏览 0评论314个赞