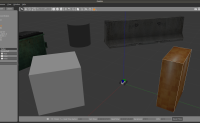
gazebo是一款功能强大的三维物理仿真平台,具备强大的物理引擎、高质量的图形渲染、方便的编程与图形接口,最重要的是其开源免费的特性。gazebo中的机器人模型与rviz使用的模型相同,但是需要在模型中加入机器人和周围环境……继续阅读 » 付雷雷 5年前 (2021-04-26) 2491浏览 0评论2235个赞
原作者:Erico Guizzo 文章来源:IEEE Spectrum ……继续阅读 » 古月 5年前 (2021-04-26) 3149浏览 0评论590个赞
原作者:Evan Ackerman 文章来源:IEEE Spectrum <……继续阅读 » 古月 5年前 (2021-04-26) 1899浏览 0评论1779个赞
教程演示环境为Windows+ROS2,过程和方法同样适合MacOS和Linux。 ros2的常用命令如下所示: ……继续阅读 » zhangrelay 5年前 (2021-04-26) 2914浏览 0评论1771个赞
前序:ROS 2| 节点 -nodes- ……继续阅读 » zhangrelay 5年前 (2021-04-26) 2368浏览 0评论742个赞
前序:ROS 2| 主题 -topics- <……继续阅读 » zhangrelay 5年前 (2021-04-26) 2623浏览 0评论723个赞
前序:ROS 2| 服务 -services- 本节详细介……继续阅读 » zhangrelay 5年前 (2021-04-26) 2475浏览 0评论1298个赞
前序:ROS 2 | 参数-parameters- 本节详……继续阅读 » zhangrelay 5年前 (2021-04-26) 2887浏览 0评论2398个赞
前序:ROS 2 | 行动-actions- 啥,开了十几个窗口,机器人还没有动起来…… 是时候了解一下launch文件啦……继续阅读 » zhangrelay 5年前 (2021-04-26) 1653浏览 0评论2667个赞
前序:ROS 2 | 启动-launch- ROS 2工具……继续阅读 » zhangrelay 5年前 (2021-04-26) 3024浏览 0评论925个赞
在ROS的发展历程中,有两件非常重要的事件,其一就是成立了独立运营的“开源机器人基金会”,推动ROS的发展;其二就是每年举办的ROS开发者大会。 随着ROS社群不断的壮大,在2012……继续阅读 » 张新宇 5年前 (2021-04-26) 3292浏览 0评论991个赞
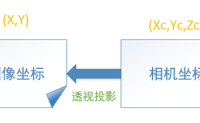
小伙伴们大家好!相信有一些同学在接触到标定的时候被花式坐标系转换、矩阵公式、畸变搞得一头雾水,今天我就带大家直击原理难点,一举拿下手眼标定! 如果有小伙伴进行过标定的操作,一定还记得其中有一句话–“进行手眼标定前一定要先进行相机标定”。这是因为相机标定的目的主要是……继续阅读 » 小枫 5年前 (2021-04-26) 3575浏览 0评论2999个赞
……继续阅读 » 古月居官方 5年前 (2021-04-26) 3585浏览 0评论2769个赞
本文转载自微信公众号ROBOTICS 上一篇(干货 | 位置角度平移旋转,“乱七八糟”的坐标变换)我们暂时抛开……继续阅读 » oCCo 5年前 (2021-04-26) 2567浏览 0评论577个赞
大家好,我是小明,很高兴我们又见面了!今天谈的领域并非我的专业方向,但也同样有趣,初次接触时让我备受启发,因此分享给大家。和上次一样,本文的工程也为大家提供了源代码,方便交流学……继续阅读 » 小明工坊 5年前 (2021-04-26) 3206浏览 0评论2355个赞
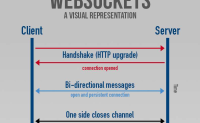
ROS是现在应为最为广泛的机器人操作系统,为了将ROS与Web端的应用结合起……继续阅读 » 祝虎 5年前 (2021-04-26) 1687浏览 0评论2162个赞
首先我必须得承认Gazebo功能有多强大,然而对于大多数刚入门的新手来说,使用Gazebo仿真的时候各种参数的配置简直让人头疼,一不小心终端就是一片“爆红”!所以今天就给大家推荐另外一款机器人仿真软件——Webots。经历了20年商业许可的它,2018年终于以开源的身份面向广泛的……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 2598浏览 0评论2944个赞
前言Docker是一个开源的应用容……继续阅读 » Luke Wilson 5年前 (2021-04-26) 2349浏览 0评论2255个赞
各位机器人技术爱好者们,大家好!很荣幸受古月老师邀请,成为古月居的签约作者。希望在这里可以同大家相互交流与学习。 始终觉得自己能力不足,但终于还是硬着头皮开始了在古月居的第一篇博客。由于我是机械专业出身,在接触机器人学时,选择了容易上手的MATLAB软件作为学习机器……继续阅读 » 二民院小学生 5年前 (2021-04-26) 2774浏览 0评论2418个赞
ROS中的二维导航功能包,简单来说,就是根据输入的里程计等传感器的信息流和机器人的全局位置,通过导航算法,计算得出安全可靠的机器人速度控制指令,然而,其自带的导航算法并不是适用所有的机器人和环境,在实际应用中我们经常需要更换导航算法来使机器人更能适应它所处的环境。……继续阅读 » Judez 5年前 (2021-04-26) 2823浏览 0评论764个赞
MoveIt是ROS中非常强大的一个开发平台,可以为机器人开发提供六大功能支持,真正做到不写一行代码,就可以从零完成各种炫酷的机器人应用功能。 ……继续阅读 » 古月 5年前 (2021-04-26) 3652浏览 0评论2374个赞
早在2015年,ROS就已经发布了第一个ROS2.0的alpha版本,现在已经发布有五个正式版了。考虑到要与时俱进嘛,所以就安装了ROS2和gazebo来学习下ROS2相关的操作,过来和大家分享下。 安装ROS2……继续阅读 » 谦墨 5年前 (2021-04-26) 3319浏览 0评论678个赞
本文转载自微信公众号ROBOTICS 前三篇文章(……继续阅读 » oCCo 5年前 (2021-04-26) 3134浏览 0评论416个赞
每一个ROS版本的发布,都伴随着一个新的乌龟吉祥物和小图标。 很多初学者,甚至有一定经验的人都不了解为什么ROS要用乌龟,ROS的设计者是怎么想的? ……继续阅读 » 张新宇 5年前 (2021-04-26) 2999浏览 0评论2367个赞
测试和调试环境:Ubuntu 18.04.2 LTSgym-gazebo支持ROS Melodic(1.0),gym-gazebo2支持ROS Crystal(2.0) htt……继续阅读 » zhangrelay 5年前 (2021-04-26) 2506浏览 0评论1316个赞
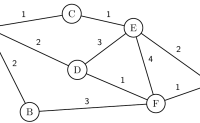
在运动规划的研究场景里很多已经存在的经典算法,在运动规划的入门阶段绕不过去的五种基础算法分别有:Dijkstra、……继续阅读 » tloinny 5年前 (2021-04-26) 3581浏览 0评论2826个赞
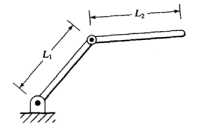
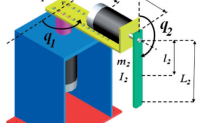
相信朋友们看了古月居之前的推送:机械臂动力学系列都收获不少吧。动力学是以运动学为基础的,今天我给大家介绍机械臂运动学相关知识。机械臂运动学研究……继续阅读 » 王谦牧 5年前 (2021-04-26) 2552浏览 0评论1607个赞
紧接着上一篇三连杆机械臂正运动学,今天我们聊一聊逆运动学的知识。机械臂逆运动学的问题描述是:已知工具坐标系相对于工作台坐标系的期望位置和姿态,如何计算一系列满足期望要求的关节角?<……继续阅读 » 王谦牧 5年前 (2021-04-26) 2779浏览 0评论1239个赞
瓦尔特1910年出生于美国[1],幼年由于父母的缘故,来到英语求学。后来成为一名神经科学家。一生多数时间在美国做研究。为了研究大脑和神经反应,1948至1949年间,瓦尔特制作了一个被自己称为“……继续阅读 » 张新宇 5年前 (2021-04-26) 3009浏览 0评论2524个赞
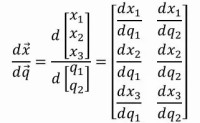
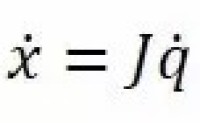
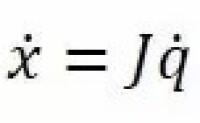
本文转载自微信公众号ROBOTICS 前言看懂本文,除了了解矩阵、向量、向量点乘、矩阵向量相乘等内容,以及看明白我们干货……继续阅读 » oCCo 5年前 (2021-04-26) 3413浏览 0评论1533个赞
本文转载自微信公众号ROBOTICS 复习 &nb……继续阅读 » oCCo 5年前 (2021-04-26) 2225浏览 0评论526个赞
本文转载自微信公众号ROBOTICS 复习 这是我们关于雅可比矩阵的第三篇文章了。本着重要事……继续阅读 » oCCo 5年前 (2021-04-26) 2812浏览 0评论1201个赞
每一个ROS版本的发布,都伴随着一个新的乌龟吉祥物,赏心悦目。 乔许·埃林森(Josh Ellingson)设计了几乎所有的ROS吉祥物,PR2宣传形象,还有R……继续阅读 » 张新宇 5年前 (2021-04-26) 2231浏览 0评论180个赞
ROS英语称为Robot Operating System,翻译成中文,就是机器人操作系统。这是一个具有误导性的名字,柳树车库内部并不是所有人都赞同使用这个名字。他们非常清楚这个软件系统并不是一个操作系统。……继续阅读 » 张新宇 5年前 (2021-04-26) 1617浏览 0评论320个赞
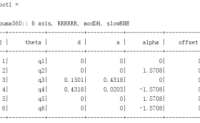
小伙伴们大家好!我来了^_^// 今天我们将继续上一次的话题,如何使用MATLAB来实现机器人的建模仿真与控制。在matlab要实现机器人的仿真与控制首先要知道机器人的DH参数,根据机器人的DH参数来推导机器人的正逆运动学,最后……继续阅读 » 二民院小学生 5年前 (2021-04-26) 2439浏览 0评论1248个赞
大家好,今天给大家继续分享一知半解|Matlab机器人建模与仿真控制这个系列的内容之三。 首先接着上一篇博客的内容,我们利用机器人的URDF文件,在Matlab环境下利用m代码和机器人系统工具箱,完成了puma560的可视化与运……继续阅读 » 二民院小学生 5年前 (2021-04-26) 2501浏览 0评论203个赞
本文为……继续阅读 » white_Learner 5年前 (2021-04-26) 2493浏览 0评论962个赞
各位ROS的学习者大家好,很荣幸收到古月前辈的邀请来到这个平台分享我的学习经验,本人是最近半年才开始接触的ROS,目前还处于很初级的学习阶段,如果你和我的经历相似,欢迎和我讨论ROS使用过程中的各种问题! 之前在进行ROS学习的……继续阅读 » NEAUZSY 5年前 (2021-04-26) 3183浏览 0评论2168个赞
本文转载自微信公众号ROBOTICS 复习 ROBOTICS的机器人学干货系列已经写到第八篇……继续阅读 » oCCo 5年前 (2021-04-26) 2472浏览 0评论2481个赞
本文转载自微信公众号ROBOTICS 逆运动学,就是从操作空间的end effector position and orientation,求关节空间的joint posit……继续阅读 » oCCo 5年前 (2021-04-26) 3316浏览 0评论1832个赞
本文转载自微信公众号ROBOTICS 这是ROBOTICS干货系列机器人学入门的一篇过渡文章:一方面,我觉得很有必要把之前讲过的东西串起来过一遍;另一方面,在我们开始啃机械臂的动力学(dyn……继续阅读 » oCCo 5年前 (2021-04-26) 1824浏览 0评论895个赞
本文转载自微信公众号ROBOTICS 今天,我们终于要开始学习机械臂的动力学了——实话说,上学时候,CC动力学这块真没学懂…… 在上一篇干货……继续阅读 » oCCo 5年前 (2021-04-26) 4266浏览 0评论2045个赞
本文转载自微信公众号ROBOTICS 在进入今天的正题之前,CC想把上一篇文章没有讲得很清楚的问题说一下——那就是,机械臂的动力学到底研究什么?(上一篇文章在此:……继续阅读 » oCCo 5年前 (2021-04-26) 1678浏览 0评论470个赞
大家好,我是(月更侠)小明,很高兴我们又见面啦。相信大家从我之前的文章中能看出来,我所讲的内容基本都面向ROS新人,因为大家刚入门时,往往很难一窥程序的深层运行逻辑,使得许多问题迟迟无法解决,甚是耽误时间。例如在和小伙伴们……继续阅读 » 小明工坊 5年前 (2021-04-26) 3110浏览 0评论432个赞
嗨伙计们,还记得上次提到的三种webots机器人建模方式吗?我们先来简单回顾一下: ① 使用webots模型树建模,同时这也是我们环境建模的主要方式;&nb……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 3274浏览 0评论748个赞