文章目录一,首先安装ros对qt pkg的支持……继续阅读 » 蒋程扬 5年前 (2021-04-26) 2673浏览 0评论624个赞
最近在ROS ANSWERS中看到这样一个问题:……继续阅读 » Z 5年前 (2021-04-26) 3478浏览 0评论2493个赞
原作者:Evan Ackerman文章来源:IEEE Spectrum编译/字幕组:沈永强 ……继续阅读 » 古月 5年前 (2021-04-26) 1701浏览 0评论1841个赞
本文转载自微信公众号ROBOTICS 上一篇文章(点……继续阅读 » oCCo 5年前 (2021-04-26) 2348浏览 0评论1708个赞
本文转载自微信公众号ROBOTICS 各位,机械臂的动力学方程又来和大家见面了!你大概看这个方程看得都生厌了,所幸这也是入门机械臂动力学的最后一篇了——但愿这个方程已经深深地刻在你的脑海里………继续阅读 » oCCo 5年前 (2021-04-26) 2385浏览 0评论796个赞
坦白说,这个OMPL系列实际上就是翻译……继续阅读 » 小明工坊 5年前 (2021-04-26) 2034浏览 0评论1797个赞
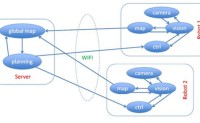
笔记本作为桌面电脑,树莓派(Rasp)作为机器人终端进行多机通讯先看一下实现效果在Rasp上运行Master和键盘控制节点,在本机运行GUI界面……继续阅读 » NEAUZSY 5年前 (2021-04-26) 3307浏览 0评论344个赞
一,实现效果:原理主要就是订阅机器人的odom话题,然后利用信号与槽更新ui仪表……继续阅读 » 蒋程扬 5年前 (2021-04-26) 3972浏览 0评论2805个赞
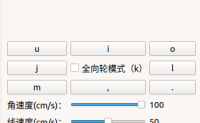
我这里主要就是参考teleop_twist_keyboard项目的源代码,移植到自己程序一,首先在ui界面添加按钮(注意按钮上显示的文字):……继续阅读 » 蒋程扬 5年前 (2021-04-26) 2705浏览 0评论991个赞
车库在2010年初完成了ROS 1.0版,并在当年三月份推出,这个正式发行版本命名为ROS Box Turtle(箱龟)。 随着机器人毕业舞会的举办,PR2挥舞着ROS大旗,标志着ROS正式登上……继续阅读 » 张新宇 5年前 (2021-04-26) 2973浏览 0评论2719个赞
ROS里的导航(navigation)软件包集的作者是埃坦•马德-爱泼斯坦(Eitan Marder-Eppstein)。埃坦•马德-爱泼斯坦毕业于圣路易斯华盛顿大学(Washington University in St. Louis),……继续阅读 » 张新宇 5年前 (2021-04-26) 1944浏览 0评论1880个赞
初学者(入门级)教程是分步说明ROS2使用的资料汇总,目标向初学者介绍ROS 2。建议按顺序学习这些教程,从“普通用户”课程过渡到“开发人员”课程,获取ROS 2的基本知识。……继续阅读 » zhangrelay 5年前 (2021-04-26) 1598浏览 0评论2011个赞
初学者(入门级)教程是分步说明ROS2使用的资料汇总,目标向初学者介绍ROS 2。建议按顺序学习这些教程,从“普通用户”课程过渡到“开发人员”课程,获取ROS 2的基本知识。……继续阅读 » zhangrelay 5年前 (2021-04-26) 3032浏览 0评论713个赞
坦白说,这个OMPL系列实际上就是翻译……继续阅读 » 小明工坊 5年前 (2021-04-26) 3583浏览 0评论2838个赞
ROS可视化(visualization)工具是一个可视化的仿真环境,通常指的是rviz环境。在仿真环境中可以观察机器人的姿态,传感器的数据。rviz工具是ROS系统官方支持的3D可视化环境,下面是rviz的样子。&nbs……继续阅读 » 张新宇 5年前 (2021-04-26) 1788浏览 0评论656个赞
这是ROS的第二个版本C Turtle,2010年8月发布。 上一个版本是阿B龟,这次只阿C龟,如果延续这种命名方式,我们看到的后续的版本将会是D Turtle, E Turtle,………继续阅读 » 张新宇 5年前 (2021-04-26) 2404浏览 0评论2298个赞
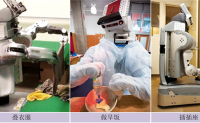
ROS C-Turtle版本增加了针对PR2机器人抓取的软件包:如检测桌面物体、用机械手对物体进行抓取和操控等。我们从下面的例子可以大致了解在很多情形下,对四周环境中的物体控制有多么重要。 大家……继续阅读 » 张新宇 5年前 (2021-04-26) 1579浏览 0评论912个赞
ROS的第三个版本D版本,于2011年3月发布,吉祥物是菱背龟(Diamondback),亦称为金刚龟,因背部有菱形图案而得此名。乔许·埃林森设计此版本的ROS海报中,无数只金刚龟在菱形风筝的助力下,在空中自由地飞翔。&n……继续阅读 » 张新宇 5年前 (2021-04-26) 2674浏览 0评论1302个赞
一,实现效果实现效果:二,核心代码创建li……继续阅读 » 蒋程扬 5年前 (2021-04-26) 2068浏览 0评论2598个赞
一,实现效果二,核心代码主要就是这么几句:……继续阅读 » 蒋程扬 5年前 (2021-04-26) 3068浏览 0评论2832个赞
一,实现效果:二,核心代码如果按照本人前几篇博客的话进程的……继续阅读 » 蒋程扬 5年前 (2021-04-26) 2969浏览 0评论1453个赞
……继续阅读 » 古月居官方 5年前 (2021-04-26) 2982浏览 0评论2391个赞
本文转载自微信公众号ROBOTICS 在很久很久以前的那篇……继续阅读 » oCCo 5年前 (2021-04-26) 2603浏览 0评论1683个赞
本文转载自微信公众号ROBOTICS 上一篇文章有读者留言说,希望我能整理出一个知识体系,对我自己也有点帮助。不瞒大家说,我觉得写这些东西对我自己的帮助,可能远远大于对其他人的。比如说四元数……继续阅读 » oCCo 5年前 (2021-04-26) 1861浏览 0评论1673个赞
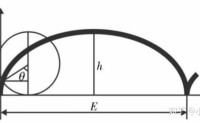
最近在重新琢磨Gazebo仿真环境,尚处于囫囵吞枣阶段。因为正好在看30多年前波士顿动力(BostonDynamics)创始人Marc Raibert的书《Legged Robots That Balance》,就用Gazebo搭建了一个简单的四足仿真模型练手。……继续阅读 » 小明工坊 5年前 (2021-04-26) 2244浏览 0评论1044个赞
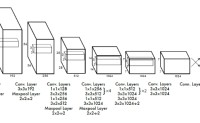
ROS已经加入对视觉信息处理的支持,尤其是改进OpenCV在ROS中的易用性。 OpenCV 是盖里·布拉德斯基(Gary Bradski)在Intel 工作期间开发的一个开源计算机视觉库。Op……继续阅读 » 张新宇 5年前 (2021-04-26) 2415浏览 0评论2279个赞
把ROS底层的库进一步分离成单独的模块,如KDL、 nodelet、 filters、 xacro、pluginlib。这样就不需要由车库的开发人员进行集中维护,每个ROS贡献者可以自行维护各自写的模块。 ……继续阅读 » 张新宇 5年前 (2021-04-26) 3067浏览 0评论441个赞
这几天继续琢磨Gazebo仿真环境。 在……继续阅读 » 小明工坊 5年前 (2021-04-26) 3064浏览 0评论2611个赞
在前面几篇教程中我们已经实现了订阅map话题,这篇我们主要就是实现rviz中的设置目标点和初始点的功能。 其实核心代码也就两三句,但是目前网上关于librviz的资料少之又少,连官方都没有api说明,只有最简单的一个demo。我……继续阅读 » 蒋程扬 5年前 (2021-04-26) 3456浏览 0评论2790个赞
前言 17年参加北邮智能车双车组,18年加入北邮机器人队,19年参加北邮智能车室外光电创意组,感触最深就是北邮机器人队……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2488浏览 0评论188个赞
一、前言 上一节:……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2434浏览 0评论1787个赞
鸡血龟 E版本2011……继续阅读 » 张新宇 5年前 (2021-04-26) 1666浏览 0评论2115个赞
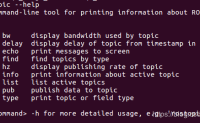
ROS和Linux中很多命令是通过命令行实现的,对Windows下长大的开发人员而言,这些命令行是陌生的。首先命令行的记忆确实没有图相化的菜单和按钮方便。大多数开发者早已习惯了Windows的图形开发界面,忽然倒退到命令行,真实很难适应。<……继续阅读 » 张新宇 5年前 (2021-04-26) 1724浏览 0评论327个赞
1 回顾上一篇文章中,我们介绍了如何使用OMPL进行单刚体运动规划。其中包含以下步骤:· ……继续阅读 » 小明工坊 5年前 (2021-04-26) 2242浏览 0评论1506个赞
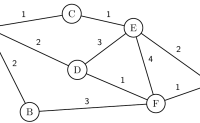
1 回顾与引出——什么是最短路径? 在……继续阅读 » 小明工坊 5年前 (2021-04-26) 3334浏览 0评论770个赞
前言 上一节:……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 1703浏览 0评论1202个赞
前言 上一节:……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 3259浏览 0评论2462个赞
前言 上一节:……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2192浏览 0评论1513个赞
书接上回,……继续阅读 » tloinny 5年前 (2021-04-26) 1909浏览 0评论443个赞
前言 上一节:……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2549浏览 0评论567个赞
前言 上一节:……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2728浏览 0评论495个赞
前言 上一节:北邮智能车仿真培训(七……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2485浏览 0评论249个赞
前言 前面的教程基本上是常规组别的,主要用于给大家写下摄像头的算法然后体会下PID,今天的教程是面向室外光电创意组的,……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 3123浏览 0评论1290个赞
继续更新,这两天继续死磕Gazebo仿真。还是拿本人之前的公布的开源项目pigot四足机器人作为仿真对象,研究四足机器人的姿态控制算法仿真。将建模与仿真过程的经验教训和相关资料进行总结(如有兴趣,推荐看一看文末的参考资料) 这一……继续阅读 » 小明工坊 5年前 (2021-04-26) 2460浏览 0评论601个赞
最近在琢磨别的事情,Gazebo探索上面进展不大,但也有一些收获,秉承慢慢写的佛系态度记录一下:1、pigot四足项目的步态改进,前行换成了摆线步态,加入了斜向步态2、Gazebo-IMU(惯性测量单元)插件的用法3、利……继续阅读 » 小明工坊 5年前 (2021-04-26) 3374浏览 0评论1028个赞