目录 1. 引言 2. 齐次变换矩阵的三种解读 2.1 坐标系表示  ……继续阅读 » hitgavin 5年前 (2021-04-26) 2186浏览 0评论1141个赞
实战Omniglot数据集识别(手写数字MNIST升级版) 目录实战Omniglot数据集识别(手写数字MNIST升级版)……继续阅读 » CyrilSterling 5年前 (2021-04-26) 2376浏览 0评论2349个赞
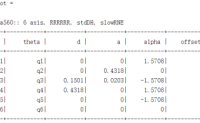
J0:假设位姿q(1xN)对应的雅克比矩阵(6xN),N为机器人关节的个数,机器人雅克比矩阵将关节速度与末端执行器空间速度V=J0*qd映射到世界坐标系中,即在末端执行器坐标系中计算雅可比矩阵并将其转换为世界坐标系 <……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 2616浏览 0评论1684个赞
这一个月来 距离实验室纳新后,已经过去一个月左右了。听取了学长的建议,这段时间也一直在搞Arduino这个软件,还算不错的认识了这个开源软件。(自我认为) 但是现在的依旧是一个小萌新,不说在软件代码的掌握程度,现在连有……继续阅读 » nidie508 5年前 (2021-04-26) 1878浏览 0评论2900个赞
有一段时间没有更新博客了,最近一段时间都在忙毕业和实习,闲暇的时候也在学习怎么写公众号推文,实在惭愧。毕业设计做的是平衡小车,这几天某宝买的器件还不知所踪,新的PCB电路板又不想画,所以在想要不把做过的过程回顾一次,以后好写论文。该项目会分“模块选型篇”、“原理篇……继续阅读 » 歌者弥城 5年前 (2021-04-26) 2770浏览 0评论890个赞
目录1. 引言2. 连杆坐标系3 DH参数3.1 DH参数的介绍……继续阅读 » hitgavin 5年前 (2021-04-26) 2823浏览 0评论684个赞
该篇博客紧接接上一篇开题篇创 基于stm32的两轮自平衡小车1(模块选型篇)(鸽了好些日子了…)。该篇为原理篇,包含一些理论分析的部分,碰到一些自己可能写不好的地方直接引用……继续阅读 » 歌者弥城 5年前 (2021-04-26) 3120浏览 0评论2089个赞
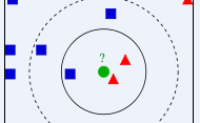
一、什么是knn算法 本章着重对算法部分进行讲解,原理部分不过多叙述,有兴趣的小伙伴可以自行查阅其他文献/文章 (一)、介绍<……继续阅读 » 我是。 5年前 (2021-04-26) 2356浏览 0评论336个赞
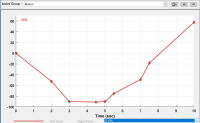
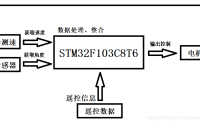
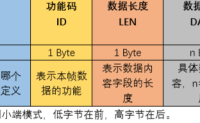
本文主要内容:详细介绍如何从0开始写一个数据通信,将数据从单片机发送到上位机(或者虚拟示波器)进行数据或图像显示,帮助我们调节一些参数,比如电机PID的调节、波形融合等,以及在我们写通信协议的时候可能遇见的问题或注意事项进行解答,本文主要以匿名上位机为例,新手和小白也……继续阅读 » 慕羽★ 5年前 (2021-04-26) 1699浏览 0评论797个赞
前言 上一篇中围绕一个简单的匀速直线运动的状态估计仿真实例展开,阐述了卡尔曼滤波器的实现方式、过程以及仿真效果。本篇将对卡尔曼滤波的几个主要参数的选取作一定的说明,同时,围绕扩展卡尔曼滤波算法展开,阐述其与卡尔曼滤波器的区别与作用。 ……继续阅读 » 遥远的乌托邦 5年前 (2021-04-26) 3309浏览 0评论2614个赞
嗨伙计们,我又来啦~ 在上次的文章[《webots玩转控制论之LQR控制器》](https://www.guyuehome.com/17688)中,我们假设系统是全状态反馈的……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 3347浏览 0评论722个赞
安装步骤 适用于 Linux 的 Windows 子系统(WSL)可让开发人员按原样运行 GNU/Linux 环境 – ……继续阅读 » 谦墨 5年前 (2021-04-26) 3318浏览 0评论1072个赞
本文将会讨论策略优化的数学基础,并且会附上简单的实践代码。三个要点 一个简单的等式,将策略梯度跟策略模型参数连接起来一条规则,允许我们将无用的项从等式里去掉另一条规则,允许我们在等式中添加有用的项……继续阅读 » 我是。 5年前 (2021-04-26) 1832浏览 0评论226个赞
S函数是simulink动态系统的核心,可以采用m代码,C,C++等语言编写S函数,由一种特定的语法构成,用来描述并实现连续系统,离散系统以及复合系统等动态系统。S函数可以接收来自simulink求解器的相关信息,并对求解器发出的命令做出适当的响应 基础知……继续阅读 » 小磊在路上 5年前 (2021-04-26) 1520浏览 0评论670个赞
由于学校这几天在开运动会,所以刚好有空闲的时间来好好琢磨这些原件以及认认真真完成这几篇博客。。。。 所以,这几天就好好研究这些电子元件。 那怎么具体研究呢,我想大概可以从这几个方面入手。 1.元件的介绍……继续阅读 » nidie508 5年前 (2021-04-26) 2646浏览 0评论337个赞
此篇为硬件篇,接上一篇“基于stm32的两轮自平衡小车2(原理篇)”。包含自行设计电路板原理图与PCB电路图的过程。详见目录。 目录 stm32管脚分配……继续阅读 » 歌者弥城 5年前 (2021-04-26) 3108浏览 0评论1463个赞
图像识别、目标检测、风格迁移 参考:https://blog.csdn.net/red_stone1/article/details/78651063 ……继续阅读 » 目睹闰土刺猹的瓜 5年前 (2021-04-26) 2513浏览 0评论2657个赞
UR5介绍 Universal Robots(优傲机器人)公司是一家引领协作机器人全新细分市场的先驱企业,该公司成立于2005年,关注机器人的用户可操……继续阅读 » 编程芝士 5年前 (2021-04-26) 3636浏览 0评论150个赞
声明:本文整理自网络,内容仅作博主学习笔记记录,版权归原作者所有! 官方参考文档: ……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 3433浏览 0评论1038个赞
Topic通讯和代码练习四、Topic通讯4.1 Publisher创建4.2 Publisher……继续阅读 » 小黑鸭 5年前 (2021-04-26) 3057浏览 0评论624个赞
文章目录1. 什么时候会出现零空间……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 3420浏览 0评论515个赞
准备 使用工具:Python3.5, 使用库: numpy opencv 涉及函数 涉及的函数:cv2……继续阅读 » Eragonl 5年前 (2021-04-26) 2335浏览 0评论465个赞
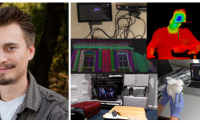
事件相机的原理和特性在此处不解释,本文只讲解如何配置和使用事件相机模拟器。模拟器是用线性插值和高斯噪声扰动的方式,模拟出事件流来。因此需要帧率尽可能的高一些。亲自测了以后,和DAVIS事件相机实际对着电脑屏幕拍摄的已经记录的视频没什么差别。 模拟器在github网址……继续阅读 » 微鉴道长 5年前 (2021-04-26) 3188浏览 0评论1670个赞
今天继续来介绍这些电子元件。 4.LM2596S DC-DC降压电源模块 介绍:一块降低调整电压的元件 &n……继续阅读 » nidie508 5年前 (2021-04-26) 3052浏览 0评论2519个赞
刚体加速度 分析刚体加速度时,在任一顺势瞬时,对刚体的线速度和角速度进行求导,可以分别得到线加速度和 角加速度……继续阅读 » 小磊在路上 5年前 (2021-04-26) 3105浏览 0评论648个赞
目录1. 引言2. 建立DH坐标系的技巧2.1 理清关节和连杆2.2 画 z 轴<……继续阅读 » hitgavin 5年前 (2021-04-26) 3808浏览 0评论2473个赞
准备工作 使用工具:Python3.5 涉及包:cv2 numpy 涉及函数 函数:cv2.setMo……继续阅读 » Eragonl 5年前 (2021-04-26) 1525浏览 0评论1082个赞
目录引言修改DH参数标准DH坐标系与修改DH坐标系的对比总结 ……继续阅读 » hitgavin 5年前 (2021-04-26) 2091浏览 0评论2320个赞
本篇是软件调试篇,接上一篇硬件篇:基于stm32的两轮自平衡小车3(硬件篇),本篇内容是对硬件部分的软件实现,具体模块详见目录。这里先上效果:……继续阅读 » 歌者弥城 5年前 (2021-04-26) 3100浏览 0评论679个赞
Service通讯和代码练习六、Service通讯6.1 Server端创建6.1.1 创建节点……继续阅读 » 小黑鸭 5年前 (2021-04-26) 3348浏览 0评论593个赞
到今天为止,智能小车的三种功能也算全部完成了。(做蓝牙模块异常的顺利)接下来就是焊接矩阵键盘,将这三种功能合并在一块了。可能还会需要一段时间,包括矩阵键盘的焊接,代码的规整,所有硬件的加入,功能排障以及优化。 做小车应该是学嵌入式的一个最基本的项目,就因为是第一个,……继续阅读 » nidie508 5年前 (2021-04-26) 1855浏览 0评论1707个赞
文章目录选题说明选题方向竞赛开发平台创新点描述……继续阅读 » 路拾遗37 5年前 (2021-04-26) 1664浏览 0评论1367个赞
1.利用工具箱建模,供验证用 选用二轴平面机械臂,两个关节角分别是theta1和theta2. view(3); Lnk1 = Link……继续阅读 » 搁浅 5年前 (2021-04-26) 3885浏览 0评论1863个赞
寒假里导员发了一个比赛通知,首届全国高校智能机器人大赛(我们输了比赛,此文可看成检讨书),比赛有两个主题,一个是创意类,大家开脑洞做东西比创意,一个是解魔方机器人,全自动解魔方比速度。 呵,创意 ……继续阅读 » 晨曦 5年前 (2021-04-26) 1957浏览 0评论2510个赞
文章目录说明1. 动力学模型2. 仿真程序1:位置先于速度更新……继续阅读 » 罗伯特祥 5年前 (2021-04-26) 1845浏览 0评论1453个赞
目录1. 引言2. 欧拉角2.1 一点点体会2.2 欧拉角定义……继续阅读 » hitgavin 5年前 (2021-04-26) 3336浏览 0评论1004个赞
注释 本节对仿人视觉没什么作用,只是想把opencv里面的这个函数给讲一下,以后就算不用opencv去做仿人视觉,也可以派的上用场。 ……继续阅读 » Eragonl 5年前 (2021-04-26) 1616浏览 0评论1446个赞
文章目录 1.总体功能概述2.功能介绍……继续阅读 » 路拾遗37 5年前 (2021-04-26) 2206浏览 0评论1334个赞
这几天在家闲着也是闲着,学东西,更博客,提升点能力吧。本篇针对的是kinetic版本的安装,其实都大同小异,有区别的地方也不大。 一.打开软件更新,把下列该勾的选项都一沟 ……继续阅读 » nidie508 5年前 (2021-04-26) 1919浏览 0评论2625个赞
前言 本篇主要针对制作智能小车过程中用到的各种结构模块进行统一阐述,为大家提供参考的同时也是自己对之前所做工作的总结。本人所制作的智能小车所需零部件均从某宝上购得,……继续阅读 » jiaolu295 5年前 (2021-04-26) 3278浏览 0评论1049个赞
文章目录研究现状总体方案设计硬件电路设计电梯逻辑控制……继续阅读 » 路拾遗37 5年前 (2021-04-26) 2900浏览 0评论489个赞
提前准备 使用工具Python3.5 使用包cv2,numpy 任务1 获取并修改像素值 读取一副……继续阅读 » Eragonl 5年前 (2021-04-26) 3523浏览 0评论1936个赞
msg消息和srv消息八、msg消息8.1 基本概念8.2 常见Msg消息 <……继续阅读 » 小黑鸭 5年前 (2021-04-26) 2584浏览 0评论2118个赞
目录1. 引言2. 四元数转旋转矩阵3. 已知旋转矩阵求四元数3.1 先求w……继续阅读 » hitgavin 5年前 (2021-04-26) 2792浏览 0评论1133个赞
ROS是什么? ROS=通信机制+开发工具+应用功能+生态系统 节点(Node)–执行单元 执行具体任务的进程、独立运行的可执行文件; 不同节点可使用不同的编程语言,可分……继续阅读 » nidie508 5年前 (2021-04-26) 3040浏览 0评论2506个赞