1 回顾上一篇文章中,我们介绍了如何使用OMPL进行单刚体运动规划。其中包含以下步骤:· ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1914浏览 0评论1613个赞
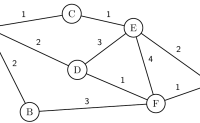
1 回顾与引出——什么是最短路径? 在……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3749浏览 0评论517个赞
前言 上一节:……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3123浏览 0评论883个赞
前言 上一节:……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2176浏览 0评论2731个赞
前言 上一节:……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3071浏览 0评论2733个赞
书接上回,……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2497浏览 0评论2008个赞
前言 上一节:……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2804浏览 0评论797个赞
前言 上一节:……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3372浏览 0评论116个赞
前言 上一节:北邮智能车仿真培训(七……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2992浏览 0评论1525个赞
前言 前面的教程基本上是常规组别的,主要用于给大家写下摄像头的算法然后体会下PID,今天的教程是面向室外光电创意组的,……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1936浏览 0评论713个赞
继续更新,这两天继续死磕Gazebo仿真。还是拿本人之前的公布的开源项目pigot四足机器人作为仿真对象,研究四足机器人的姿态控制算法仿真。将建模与仿真过程的经验教训和相关资料进行总结(如有兴趣,推荐看一看文末的参考资料) 这一……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2267浏览 0评论1267个赞
最近在琢磨别的事情,Gazebo探索上面进展不大,但也有一些收获,秉承慢慢写的佛系态度记录一下:1、pigot四足项目的步态改进,前行换成了摆线步态,加入了斜向步态2、Gazebo-IMU(惯性测量单元)插件的用法3、利……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3797浏览 0评论1745个赞
一、前言 操作系统:ubuntu16.04……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2587浏览 0评论2358个赞
有必要谈一谈Gazebo。Gazebo是一个机器人三维仿真环境,这里面增加了称为“基于物理的仿真”这样的元素。学物理的时候,我们学习了,位移,速度,加速度,重力,摩擦力等概念,在这样的仿真环境里,可以模拟这样一些……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2350浏览 0评论996个赞
相关资料来源于教育部公布的2016,2017,2018,2019年度普通高等院校本科专业备案或审批结果的通知 (2019年4月最新更新,机器人……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2383浏览 0评论549个赞
一、先看效果……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3385浏览 0评论2883个赞
之前发了一个在gazebo中抓取失败的帖子,过段时间来看被删了好像, 可能我发错地方了。后来在github上一个牛人的程序里找到了一个grasp fix的插件来修复抓取问题(据他说,这个问题是gazebo7以及之前版本普遍的问题,ode的问题), 虽然我的毕设到此能抓就行了……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2948浏览 0评论1978个赞
UR5构型的机械臂是目前机器人领域比较常见的一种,本文基于GuYueInvent PROBOT C800(……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3097浏览 0评论1640个赞
编译系统将各种软件包组织在一起,生产一个可执行程序或被其他可执行程序调用的库文件。如果我们记得ROS的设计原则之一是:跨平台和多语言支持,做到这一点非常不易,编译系统起到关键作用。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2149浏览 0评论2686个赞
以前有专门为ROS定制的软件库如PCL、Stage、Gazebo。H版本里这一部分做了较大的变动,将依赖于这些专用的软件库,修改成了依赖于其相应标准软件库。比如,一个软件包需要依赖ROS版的PCL,现在则改为依赖标准的PCL即可。这样就不需要单独更新ROS版本的PCL。St……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1962浏览 0评论1603个赞
原作者:Evan Ackerman文章来源:IEEE Spectrum编译/字幕组:沈永强 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2630浏览 0评论866个赞
什么是SDF? SDF是一种XML格式,能够描述机器人、静态和动态物体、照明、地形甚至物理学的各方面的信息。SDF……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3060浏览 0评论1850个赞
本文为使用ROS 2和Gazebo9搭建仿真机器人详细指南。 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2710浏览 0评论1734个赞
本文使用的机械臂模型是《MoveIt可视化配置及仿真指南》课程中的机械臂模型,并加入了小修改。 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2088浏览 0评论2643个赞
在2015年,DARPA举办了一届机器人挑战赛(DARPA Robotics Challenge)。23只进入决赛的队伍中,有18支队伍使用ROS,有14支队伍利用Gazebo进行仿真,ROS取得非凡的成绩。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3437浏览 0评论1615个赞
MoveIt! 第一次看到这个名字可能会觉得很奇怪,名字是怎么来的,怎么还有一个感叹号?如果大家了解一个专门负责抓取的软件叫GraspIt!,就不会觉得特别奇怪了。MoveeIt!源于ROS的机械臂导航(arm_navigation)软件包,但是MoveIt!的创始团队希望……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2798浏览 0评论2236个赞
TurtleBot是一款移动机器人,特点是便宜。TurtleBot带有摄像头和移动底盘,可以用于研究机器人的导航问题:即机器人决定往哪个方向走,怎么走,怎么绕过障碍物,最终到达目的地。不少ROS的初学者是在TurtleBot的陪伴下学习的机器人编程的。以至于一些人想方设法能……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1644浏览 0评论2542个赞
上一篇,已经在Gazebo 9中放入了一个支持ROS 2的仿真机器人,具体参考:使用机器人操作系统ROS 2和仿真软件Gazeb……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1967浏览 0评论2557个赞
一、前言 之前的教程使用Python代码实现了四轮车的巡线,阿克曼模型确实在方仿真上效果都好多了,今天教大家将代码从python修改成……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2774浏览 0评论2717个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2511浏览 0评论2800个赞
说到TurtleBot,就要说背后的男男女女。 前文说过,TurtleBot是图利·弗特(Tully Foote)和麦罗尼·威瑟(Melonee Wise)发明的,而且软硬件开源,最早的使用者是Google。&……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2752浏览 0评论1879个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3637浏览 0评论167个赞
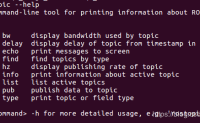
课程目的 ROS使用过程中,涉及许多命令和终端的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2667浏览 0评论2939个赞
在完成教程(一)搭建机器人和(二)命令遥控可视化后,将仿真机器人用于更为逼真的环境,可以测试如……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2406浏览 0评论1363个赞
TurtleBot的另外一位发明人、创始人是图利·弗特(Tully Foote)。 图利·弗特本科就读于加州理工学院(California Institute of Technology),硕士研究生毕业于宾夕法尼亚大学(Uni……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3570浏览 0评论2181个赞
前言……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2230浏览 0评论347个赞
前言这是一个系列小文章,主要介绍在ROS-Gazebo中如何更好地使用SDF格式建模与仿真。众所周知,URDF是ROS的原生支持格式,但在某些情况下(尤其是Gazebo仿真时)……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2916浏览 0评论528个赞
前言这是一个系列小文章,主要介绍在ROS-Gazebo中如何更好地使用SDF格式建模与仿真。众所周知,URDF是ROS的原生支持格式,但在某些情况下(尤其是Gazebo仿真时),使用SDF格式会更加合理。鉴于中文网络上几乎没有成体系的SDF介绍博文,因……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2767浏览 0评论340个赞
前言这是一个系列小文章,主要介绍在ROS-Gazebo中如何更好地使用SDF格式建模与仿真。众所周知,URDF是ROS的原生支持格式,但在某些情况下(尤其是Gazebo仿真时),使用SDF格式会更加合理。鉴于中文网络上几乎没有成体系的SDF介绍博文,因……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2176浏览 0评论2267个赞
目标跟踪可以使用激光或视觉传感器,本节开始只提供思路,无教程,供有兴趣的朋友自主实践。激光测距视觉识别融合技术……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2802浏览 0评论849个赞
前言这是一个系列小文章,主要介绍在ROS-Gazebo中如何更好地使用SDF格式建模与仿真。众所周知,URDF是ROS的原生支持格式,但在某些情况下(尤其是Gazebo仿真时),使用SDF格式会更加合理。鉴于中文网络上几乎没有成体系的SDF介绍博文,因……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2456浏览 0评论996个赞
前言这是一个系列小文章,主要介绍在ROS-Gazebo中如何更好地使用SDF格式建模与仿真。众所周知,URDF是ROS的原生支持格式,但在某些情况下(尤其是Gazebo仿真时)……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3763浏览 0评论1636个赞
原作者:Jorge Nicho文章来源:The Robot Report……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2582浏览 0评论1715个赞
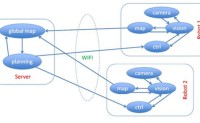
引言本教程连载一辆能够用 ROS 控制的带摄像头的小车,用 ROS 发布图像数据,对获取到的图像进行处理,如目标检测。本篇文章主要介绍如何把本教程后面的内容汇聚起来,实现一个能目标检测的小车。 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2166浏览 0评论1039个赞
TurtleBot非常受欢迎,全球卖出了上千台TurtleBot。这是两位创始人始料未及的。 究其原因是,所有好一点的机器人都太贵了,自己设计开发一款机器人也太贵了,太费时了。 Tu……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2522浏览 0评论2485个赞