……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3358浏览 0评论565个赞
上一篇文章里介绍了贝叶斯滤波的理论框架,知道了贝叶斯滤波假设了机器人的状态服从某个概率分布,并且知道了如何利用Bayes公式对其概率分布更新。然而,前面的内容仅仅是介绍了其完美的数学原理,实际计算起来却并不适用。在这篇文章中,就将介绍如何通过一系列假设去简化……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1807浏览 0评论1390个赞
通过前面的基础学习,本章进入最为激动的机器人自主导航的学习。在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命。本章将围绕机器人SLAM建图、导航避障、巡航、监控等内容展开。本章内容: 在机器人上使……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3332浏览 0评论1173个赞
前面两篇文章里首先介绍了贝叶斯滤波的理论框架,之后对机器人模型做了线性高斯假设,推出了卡尔曼滤波的迭代方程组。在这篇文章中,就将进一步介绍当机器人模型为非线性时该如何使用贝叶斯滤波。我们将介绍扩展卡尔曼滤波器以及无迹卡尔曼滤波器的由来。 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3003浏览 0评论1045个赞
2020年,Ubuntu最新的LTS版本20.04如期而至,古月君早就摩拳擦掌想要尝试一下,今天就大胆来一次硬盘安装。 笔记本型号:小米15.6 Pro 原系统环境:Windows ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1719浏览 0评论207个赞
嗨伙计们,罗伯特祥又来和大家见面了! 最近,很多小伙伴私信我,问我到底应该使用哪款仿真器来仿真,所以笔者临时决定结合自己的使用经历写篇科普文跟大家一起来分析对比一下Ga……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3005浏览 0评论495个赞
机器人专业的学生,多多少少总需要和机械结构打点交道。有时候可能是做个安装设备的架子,有时候可以需要个简单的运动机构,这些简单的东西如果找别人做就会耽误很长的一段时间。这个时候掌握一点Solidworks绘图技能,你的苦恼就消失啦。 <……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3134浏览 0评论1007个赞
通过前面的基础学习,本章进入最为激动的机器人自主导航的学习。在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命。本章将围绕机器人SLAM建图、导航避障、巡航、监控等内容展开。本章内容: 在机器人上使……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2856浏览 0评论2269个赞
原作者:Evan Ackerman文章来源:IEEE ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1534浏览 0评论263个赞
0.三轮全向移动平台简介在机器人硬件的大家族中,移动平台算是占据了一席之地,近几年在各类大大小小的机器人比赛中使用三轮全向移动平台的频率越来越高,这种有意思的结构似乎越来越受机器人爱好者的青睐。 三轮全向移……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1803浏览 0评论746个赞
0. 麦克纳姆轮全向移动平台简介麦克纳姆……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2410浏览 0评论1591个赞
Qt Creator for ROS如果想在Qt上进行ros包的开发和GUI界面开发,……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3427浏览 0评论2119个赞
想玩全向小车么?想搭建一个移动底盘么?想满足中二病的创造欲么? 想? 那么为什么不自己做一个麦克纳……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2697浏览 0评论2514个赞
一阶贝塞尔曲线(包含两个控制点)假设控制点为P0和P1,曲线方程为: ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2219浏览 0评论1432个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3051浏览 0评论2692个赞
关于大佬们的一些见解 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2636浏览 0评论1483个赞
随着3D相机的普及和3D激光传感器价格的降低,机器人依靠3D传感器视觉避障和路径规划方案逐渐成为趋势。近期采用3D相机进行了路径规划的仿真和实测。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3118浏览 0评论474个赞
马斯克的龙飞船中的操作系统是Linux,软件工程使用的是C++,用GCC和GDB去调试代码,C++如此强大和灵活,所以有必要了解一下C++工程是如何make的. 我们在写CMakeLists.txt时候需要查找第三方库的头文件和……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2064浏览 0评论2667个赞
转载自:http://emuch.net/html/201009/2……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1663浏览 0评论664个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1922浏览 0评论1897个赞
上期回顾:RT-Thread智能车目标识别系统连载教程—……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2398浏览 0评论2786个赞
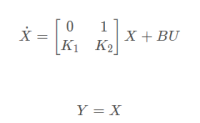
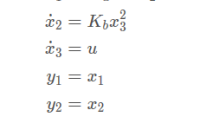
本文介绍了如何利用MATLAB辨识状态空间方程中的未知参数。 假设我们的被控系统的表达如下: ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1879浏览 0评论571个赞
原理对于ROS里面用Python写的节点,是可以直接用 python your_node_name<……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2685浏览 0评论2470个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2864浏览 0评论2785个赞
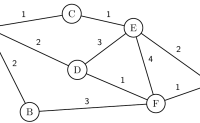
上一回,我们讲完了A*的工作原理,与Dijkstar相比A*确实有一……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2368浏览 0评论194个赞
上期回顾:RT-Thread智能车目标识别系统连载教程——手写体识别模型 (1)……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3399浏览 0评论2141个赞
1. 原理1.1 AB相编码器 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2042浏览 0评论1389个赞
导言你也在机器人动力学仿真过程中,遭遇了许多BUG吗? 没关系,在这里或许能找到你想要的答案! 正文先来考虑一个很简单的情况,假设有一个椭……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2026浏览 0评论2219个赞
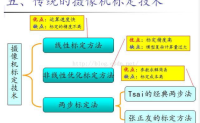
参考代码:https://github.com/christianwengert/calib_toolbox_addon<……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2058浏览 0评论2142个赞
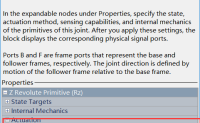
全文目录什么是RQT?一个RQT Plugin的工程目录各文件详细说明程序运行逻辑编写RQT插件的具体操作步骤<……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2365浏览 0评论469个赞
快速随机搜索树(Rapidly-Exploring Random Tree, RRT)算法是移动机器人或机械臂常用的轨迹规划算法,用于规划出一条运动轨迹。其主要步骤分以下几步: 1. 初始化需要规划的2D或3D地图,给出移动机器人或机械臂要运动的起点和终点坐标,树的根部在起点。 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2858浏览 0评论210个赞
全文目录什么是RQT?一个RQT Plugin的工程目录各文件详细说明程序运行逻辑编写RQT插件的具体操作步骤<……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1569浏览 0评论253个赞
上期回顾:RT-Thread智能车目标识别系统连载教程——手写体识别模型 (1)……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1866浏览 0评论2566个赞
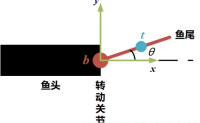
两连杆机器鱼的简单建模方法在机器鱼的建模过程中,无可避免地会遇到一个问题,那就是: 机器鱼的推进力是如何产生的呢?……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2830浏览 0评论2562个赞
工具和参考链接由于机器人动力学模型往往都是非线性的,这里用到的工具是: MATLAB的System Identification Toolbox(系统辨识工具箱),其中的Nonlinear Grey-Box……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2501浏览 0评论1040个赞
经常有小伙伴在古月居后台咨询ROS安装和上手使用的问题,相信使用过ROS的同学们都深有体会吧: 1.rosdep为啥总是报错,换网、换源、换电脑,怎么都解决不了?2.ros安装也太慢了吧,看着不到KB级的下载速……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2470浏览 0评论595个赞
1、前记:可能用Robotics Toolbox建立的机器人模型与实际机器人在外观上存在天壤之别吧,直接将CAD软件(UG、SolidWorks、CATIA、Proe等)做好的3D模型导入MATLAB中是一个很好的选择……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3301浏览 0评论485个赞
1、前记按照一定的套路,在开篇之前先如下方式开车—自行车(自己学习的总结)。 在之前的博客中写到了一些MATLAB环境下使机器人可视化,并做控制。如: ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1792浏览 0评论2729个赞
1、前言:MATLAB下机器人可视化与控制—simulink篇(1)主要内容:是利用 s……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3201浏览 0评论1608个赞
前言本来想直接用百度智能车比赛的数据集训练,但是发现在ROS中搭建红绿灯模型和提供的数据集在颜色亮度外形上都有点差别… …无奈从创建数……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3292浏览 0评论2313个赞
前言第一节: 基于paddledetecti……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2798浏览 0评论2218个赞
前言第一节: 基于paddledetecti……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2378浏览 0评论1262个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1984浏览 0评论1619个赞
1、前记先提一下,在这篇MATLAB机器人可视化文章中提到了如何使CAD模型的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3774浏览 0评论2540个赞
1、来源论坛里的帖子,主要是回答如何通过Robotstudio来获取ABB机器人的D-H参数。对话内容(复制粘贴):Hej Hej, My name is Nikolas and I am resea……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3173浏览 0评论1408个赞