CMake的使用简介和补充知识内容概要认识CMake及应用 应用,与Gcc,Makefile……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2019浏览 0评论1193个赞
之前讲的话题通信是基于订阅/发布机制的,无论有没有订阅者,发布者都会周期发布数据,这种模式适合持续数据的收发,比如传感器数据。机器人系统中还有另外一些配置性质的数据,并不需要周期处理,此时就要用到另外一种ROS通信方式——服务(Service)。 服务是基于客户端/……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2605浏览 0评论440个赞
距离我签约古月居已经过去了一个月了,博主因为在这一个月的时间里琐碎的事情非常的多,所以也推迟了我发博客的时间。……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2181浏览 0评论980个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2542浏览 0评论815个赞
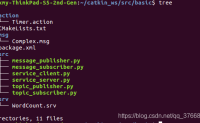
前言 在ros中定义一个服务,计算字符串中单词的数量 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3047浏览 0评论1248个赞
注:本篇博文全部源码下载地址为:Git Repo……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2228浏览 0评论1501个赞
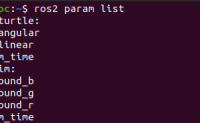
参数也是ROS2中很重要的一个概念,主要作用是对节点功能的配置,在ROS2中,每个节点都有自己的参数,这些参数可以用整型数、浮点数、布尔型数、字符串和列表来描述。 依然是以小海龟仿真器为例,看看里边有哪些参数。 1.启动小海龟仿真器……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2647浏览 0评论994个赞
前言 前面一章已经完成了turtlebot3的仿真操作以及slam导航,这一节将实现脚本控制turtlebot3在多点之间来回导航。工程链接:……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2383浏览 0评论1698个赞
今天给大家普及一下ESP8266的开发环境和VScode Arduino的开发环境配置。 我们这一系列的ESP8266开发都是基……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2836浏览 0评论1086个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2006浏览 0评论2751个赞
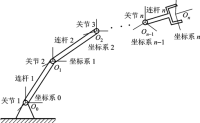
一、概述 机器人运动学研究的是机械臂各个连杆之间的位移关系、速度关系和加速度关系。比较经典的一本书推荐大家读读熊有伦的《机器人技术基础》……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2868浏览 0评论1326个赞
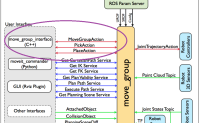
之前介绍到的话题和服务是ROS中最重要的两种底层通信机制,但也并不是说能解决所有应用层的问题,举一个例子,如果要让机械臂抓取一个物体,我们不仅要发出指令,还需要获取机械臂的实时反馈,如果直接用话题和服务也可以实现,不过一下得上好几个,有点麻烦。 所以针对类似的场景,……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1806浏览 0评论1531个赞
先挖个坑:实现基于python的DFS,BFS ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1731浏览 0评论1295个赞
上一篇,我们讲完了RRT,这回我们来讲运动规划入门系列的最后一个算法——人工势场法。回想当时我第一次听说人……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3492浏览 0评论257个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1941浏览 0评论443个赞
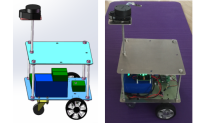
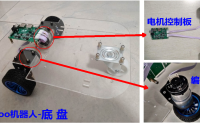
一、是什么开源项目? 从本博文开始将开源一个基于ROS系统的自主移动机器人项目,该项目基于一个差动轮机器人平台展开,机器人的设计效果图和实物图如下图1所示。 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1787浏览 0评论2804个赞
先放张效果图,(*^__^*) 嘻嘻…… ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3530浏览 0评论866个赞
在终端中运行ROS2节点时,节点的日志信息会在终端中显示出来,但是这种方式呈现的日志比较凌乱,所以ROS2提供了一个专门用于管理日志信息的可视化工具——rqt_console。今天我们就来看看这个工具是如何使用的。 1.启动 首先打开……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1968浏览 0评论2628个赞
之前关于机械臂的教程《ROS机械臂控制之跟踪二维码<……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2080浏览 0评论2074个赞
matplotlib生成三维点云包围盒 运行环境: win10、 python3.5.2、 matplotlib 评价:消耗时间较长 效果展示: ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3716浏览 0评论2198个赞
在开始介绍本开源项目的机械结构设计之前,先和博友们用一篇博文分享一下机械设计工作相关的特点、性质。抛出结论:笔者觉得在机器人领域,机械结构设计基本上是决定一个产品能否实现或超预期实现预设功能的关键之一,因为一切上层软硬件都是基于机械本体完成的。 一、机械……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1648浏览 0评论2596个赞
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3062浏览 0评论224个赞
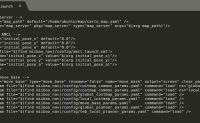
到现在为止,每次启动一个ROS2中的节点,我们都需要开启一个新的终端运行ros2 run指令,如果机器人系统中的节点很多,这样岂不是很麻烦。 ROS2针对这个问题,专门设计了launch启动文件,可以通过一个类似脚本的文件,一起启动多个节点并允许在文件中对节点进行配……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2481浏览 0评论2113个赞
我们在机器人控制中见到的四元数……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3384浏览 0评论973个赞
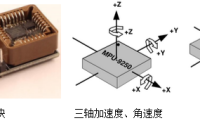
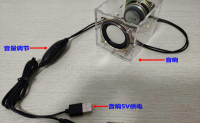
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2404浏览 0评论2541个赞
有的时候我们希望在别人已有的数据集上做开发,或者复现之前已经构建好的场景数据,这时候就可以用ROS2中的ros2 bag工具啦。 ros2 bag是一个命令行工具,可以实现对ROS2系统中话题数据的录制和回放,选定的数据会被打包放到一个数据库文件中,未来使用该工具即……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3883浏览 0评论2480个赞
原图像: ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3209浏览 0评论2187个赞
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2011浏览 0评论351个赞
前言 《ros机器人编程实践》— 第五章动作的定义。 前面尝试了定义自己的消息类型和服务,接下来是定义动作。服务只适用于及时响应的消息类型,和编程的函数基本类似,有自己的输入输出。但是在解决机器人运作问题上服务显然就不够用了,就好比投篮,我们用服务来写只能做到写……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2613浏览 0评论1567个赞
前言 《ros机器人编程实践》第六章机器人与仿真 子系统概念 子系统:机器人通过建立子系统的方法来简化设计和分析过程。 执行子系统:直接与机器人轮子或者机械臂交互感知子系统:直接与传感器交互……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1745浏览 0评论907个赞
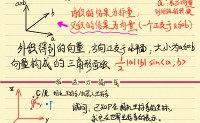
不同于之前发布的文章。我将使用一种全新的方式,iPad Notability+Blog的方式打开这个板块的大门。原因有两个: (1)Notability更方便手写长公式,也方便手绘坐标系变换等等; ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1811浏览 0评论2977个赞
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2065浏览 0评论2429个赞
注:本篇博文全部源码下载地址为:Git Repo传送门……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2442浏览 0评论512个赞
ROS2中的工作空间类似我们常说的概念——“工程”,是我们在ROS中开发具体项目的空间,所有功能包的源码、配置、编译都在该空间下完成。 我们可能会同时开发多个项目,就会产生多个工作空间,所以工作空间之间也有一个层次的问题,类似于优先级的概念,比如不同工作空间中有同名……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1883浏览 0评论1025个赞
文章简述:本文主要讲述笔者在进行基于ROS的机器视觉开发中涉及到的相机驱动配置问题,讲述如何安装Realsense的相机驱动以及相机与ROS支持的功能包,并针对安装过程中出现的错误进行分析并提供相应的解决方案。 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3301浏览 0评论2931个赞
前言 国赛篇的第一期我们实现了最基础的多点导航,并利用rviz标定分段目标点进行导航。但是官方补充完规则之后,这个方案就无法用来进行完成比赛了。……继续阅读 » 小白 5年前 (2021-04-26) 3461浏览 0评论944个赞
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1788浏览 0评论1575个赞
前言 本文目标,史上最全,入门最简。工程链接:下载地址 这一节参考书上的例子,用gazo……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1830浏览 0评论921个赞
功能包是ROS2中组织代码的基本容器,方便我们编译、安装、分发开发的代码,一般来讲,每个功能包都是用来完成某项具体的功能相对完整的单元。 ROS2中的功能包可以使用CMake或者Python两种方式来编译,其本身是一个“文件夹”,但和文件夹不同的是,每个功能包中都会……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2206浏览 0评论1505个赞
vSLAM的数学铺垫。 1. 点与坐标系 <……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2754浏览 0评论2398个赞
中国机器人操作系统(ROS)暑期学校自2015年举办以来,被ROS开源基金会誉为除了ROSCon之外的规模最大、参与人数最多、最成功的ROS线下活动。过去五年间,中国机器人操作系统(ROS)暑期学校共吸引了全国2……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2430浏览 0评论1608个赞
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2991浏览 0评论1134个赞
ROS2计算图中的每个节点都各司其职的在运行某个功能单元,节点之间也难以避免会有数据的传输,也就是通过我们之前介绍的话题和服务实现通信。之前我们已经通过命令行实现过话题的发布和订阅,本篇我们就来尝试下如何通过C++代码来实现发布者和订阅者。 1.创建功能包……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3833浏览 0评论724个赞
注:本篇博文全部源码下载地址为:Git Repo。 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1937浏览 0评论2703个赞
前言 注意:因为版本原因没能成功操作R2,还在探索阶段,这里只是记录安装过程。 NASA的R2机器人已经在空间站成功的部署了,可是这个开源机器人在ros平台上的资源很少,估计都被人遗忘了,R2机器人拥有两条机械臂以……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2631浏览 0评论1532个赞