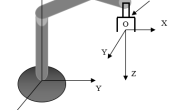
1、前言:MATLAB下机器人可视化与控制—simulink篇(1)主要内容:是利用 smimport(‘YourRobot.urdf’);函数将含有机器人文件的机器人导入到MATLAB中,并集合成一个装配体在simulink中—和Simscape Multibody中的例子一样,通过给关机以驱动实现机器人的运动控制 ,如 matlab机械臂运动(2)中,Revolute Joint中的Actuation部分进行控制驱动输入的选择。以下是Motion控制运动。然后以Signal Builder绘制驱动部分的角度变化。注意要添加
")
")
")
2、以上是对之前的简单回忆,下面是对控制输入的两种方式可切换—用Manual Switch。一种控制是事先绘制好的曲线,一种是利用Slider Gain,将仿真时间设置为inf,实时的仿真控制。如下:
")
")
3、效果:
1)与 matlab机械臂运动(2)同
")
2)手动切换为滑块控制:
")
4、总结:如果知道机器人的DH参数便可以编写同样的正逆运动学算法,以GUI的方式来实时的显示正逆运动学计算结果,S PS 部分注意单位的变换和其他部分选择,调PID部分后续跟进。