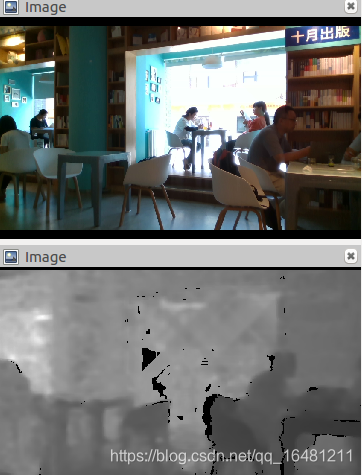
随着3D相机的普及和3D激光传感器价格的降低,机器人依靠3D传感器视觉避障和路径规划方案逐渐成为趋势。
近期采用3D相机进行了路径规划的仿真和实测。
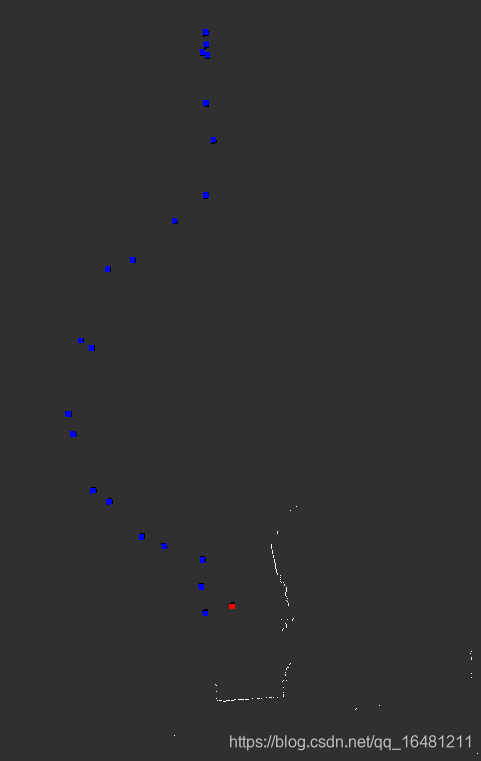
蓝色路标点表示机器人需要经过的waypoints
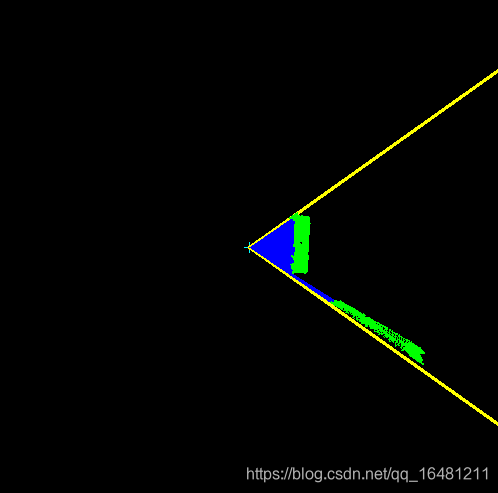
机器人眼中的世界
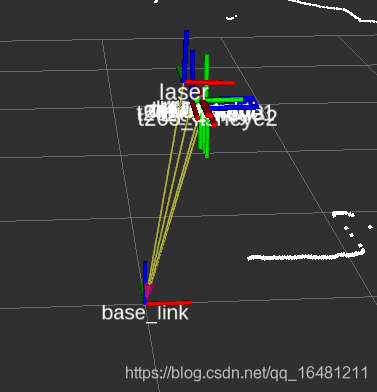
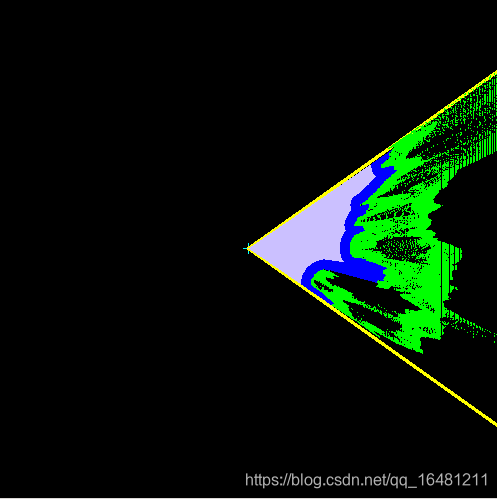
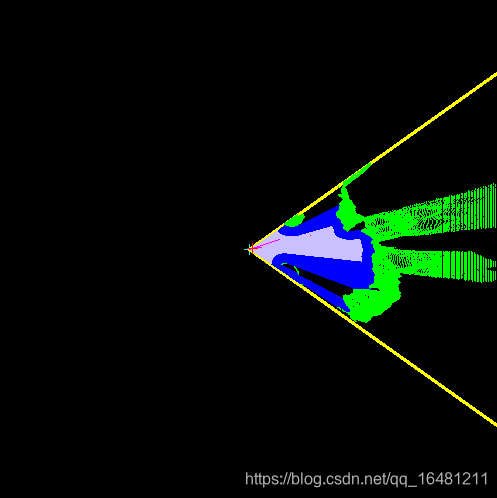
黄线为机器人深度相机视角,黑色为未知区域,绿色为障碍物,蓝色为空闲区域
膨胀后的局部地图
机器人逐渐靠近目标物
随着3D相机的普及和3D激光传感器价格的降低,机器人依靠3D传感器视觉避障和路径规划方案逐渐成为趋势。
近期采用3D相机进行了路径规划的仿真和实测。
黄线为机器人深度相机视角,黑色为未知区域,绿色为障碍物,蓝色为空闲区域