随着3D相机的普及和3D激光传感器价格的降低,机器人依靠3D传感器视觉避障和路径规划方案逐渐成为趋势。近期采用3D相机进行了路径规划的仿真和实测。……继续阅读 » 南山二毛 5年前 (2021-04-26) 2076浏览 0评论1449个赞
引言 实际应用中,我们也会经常使用到直线轨迹,然而(5)中讲的三次多项式并不能满足我们的直线轨迹。然而如果单纯地使用直线轨迹,线段间的转折点会让速度不连续,如何又能使用直线轨迹又能满足速度连续呢?在这里引出一次多项……继续阅读 » aic1999 5年前 (2021-04-26) 2844浏览 0评论2217个赞
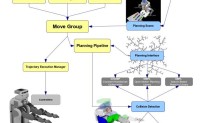
运动规划(Motion Planning):要让一个机器人实现运动规划,需要先将机器人抽象到构形空间(C-Space)。MoveIt就可以帮大家把这些工作给做了,只需提供机器人URDF模型,就可以调用几大运动规划库的规划算法(如OMPL,SBPL……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3440浏览 0评论2750个赞
文章目录A 路径规划定义B 构型/位型空间(configuration Space)C 障碍物与构型空间C 环境模型建立D 欧氏距离与曼哈顿……继续阅读 » 二进制人工智能 5年前 (2021-04-26) 2404浏览 0评论2428个赞
Dijkstra算法Dijkstra算法是从一个节点到区域各节点的最短路径算法,解决的是最短路径问题。特点:以起点为中心,向外层层扩展,直到扩展到终点为止。……继续阅读 » 二进制人工智能 5年前 (2021-04-26) 2713浏览 0评论2665个赞
目的 对AGV循迹过程进行分析,探讨轨道对AGV性能的要求,为设计参考轨道提供指导。 AGV……继续阅读 » robinvista 5年前 (2021-04-26) 3526浏览 0评论1105个赞
Aster(A*)算法Aster算法是在Dijkstra算法基础上发展出来的,是在静态路径中用于求解最优路径有效的直接搜索算法,比dijkstra算法多了一个启发式的搜索函数,也就是通过一个代价函数来确定搜索方向(从起点开始向周围扩张,通过代价函数,计……继续阅读 » 二进制人工智能 5年前 (2021-04-26) 2458浏览 0评论722个赞
RRT路径规划算法地图RRT算法原理路径平滑处理总结RRT(Rapidly-Exploring Random Tree)算法是一种……继续阅读 » unique_jie 5年前 (2021-04-26) 3407浏览 0评论2679个赞
目的……继续阅读 » robinvista 5年前 (2021-04-26) 2515浏览 0评论1608个赞