Qt Creator for ROS
如果想在Qt上进行ros包的开发和GUI界面开发,建议采用下面的方法。
https://ros-qtc-plugin.readthedocs.io/en/latest/_source/How-to-Install-Users.html
Setup Qt Creator for ROS
Setup Ubuntu to allow debugging/ptrace
- Open file: sudo gedit /etc/rc.local
- Add this line before the exit 0 line: echo 0 | tee /proc/sys/kernel/yama/ptrace_scope
- Reboot computer
Start
安装好Qt后打开软件。
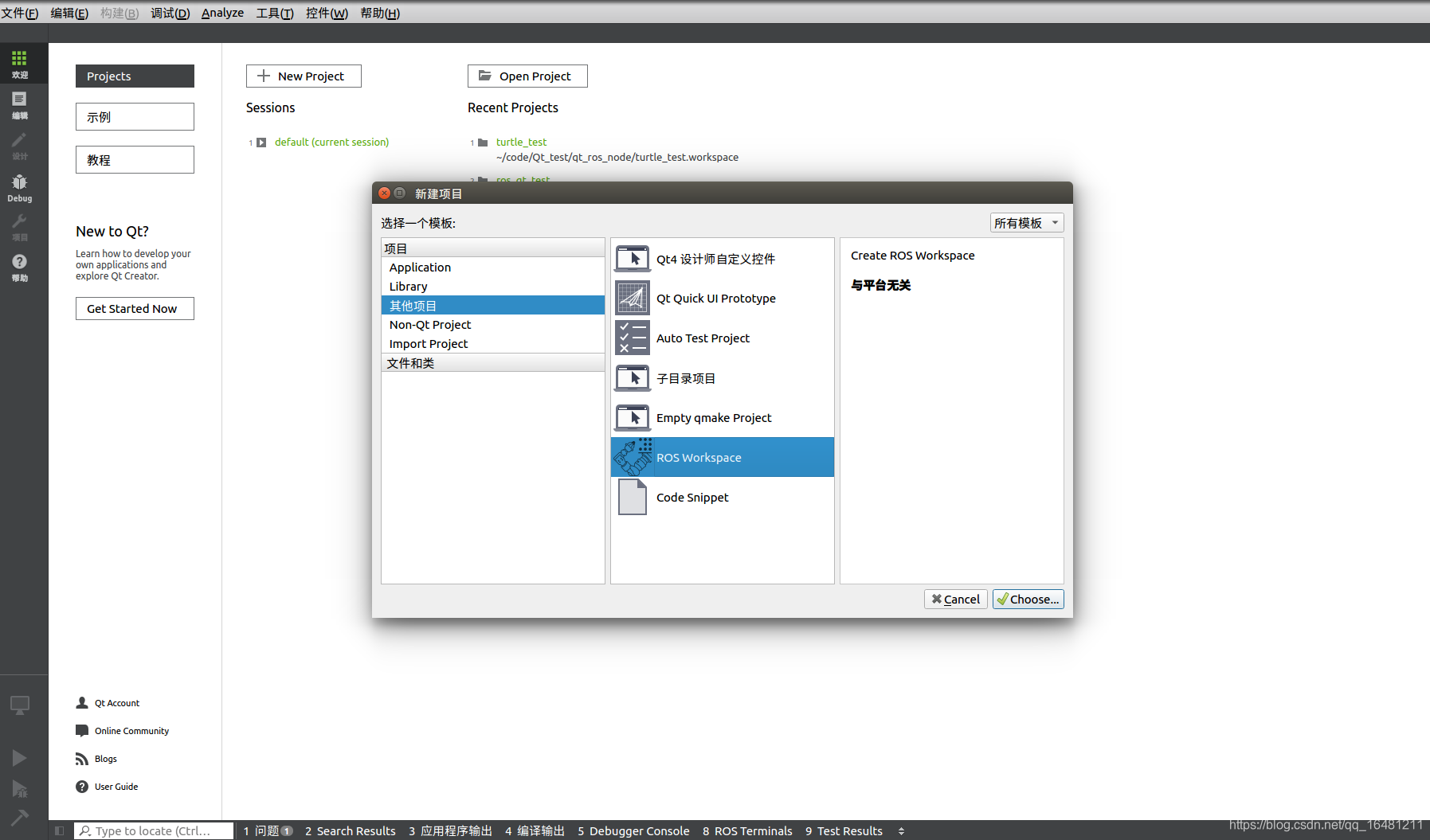
新建项目->其他项目->ROS workspace,选择choose。
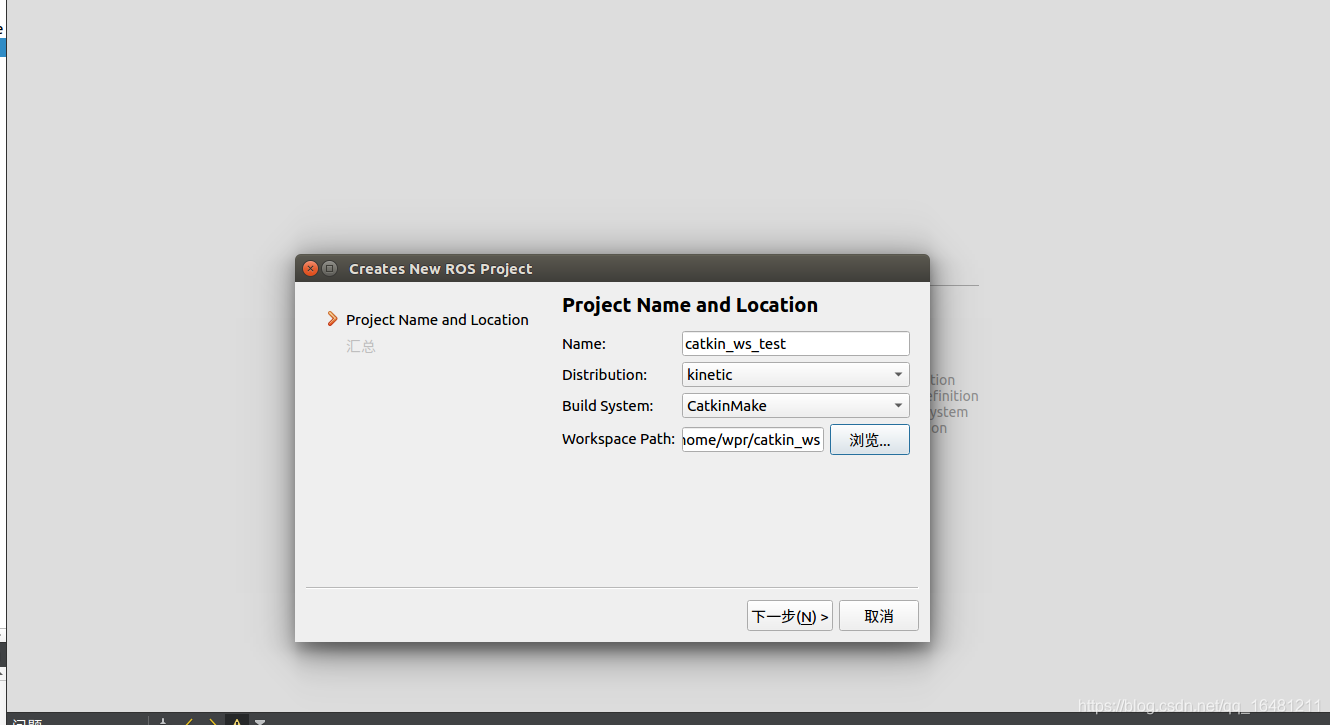
选择好工作空间的位置,名称,编译方式,完后点击完成。
右键src添加一个ros package.
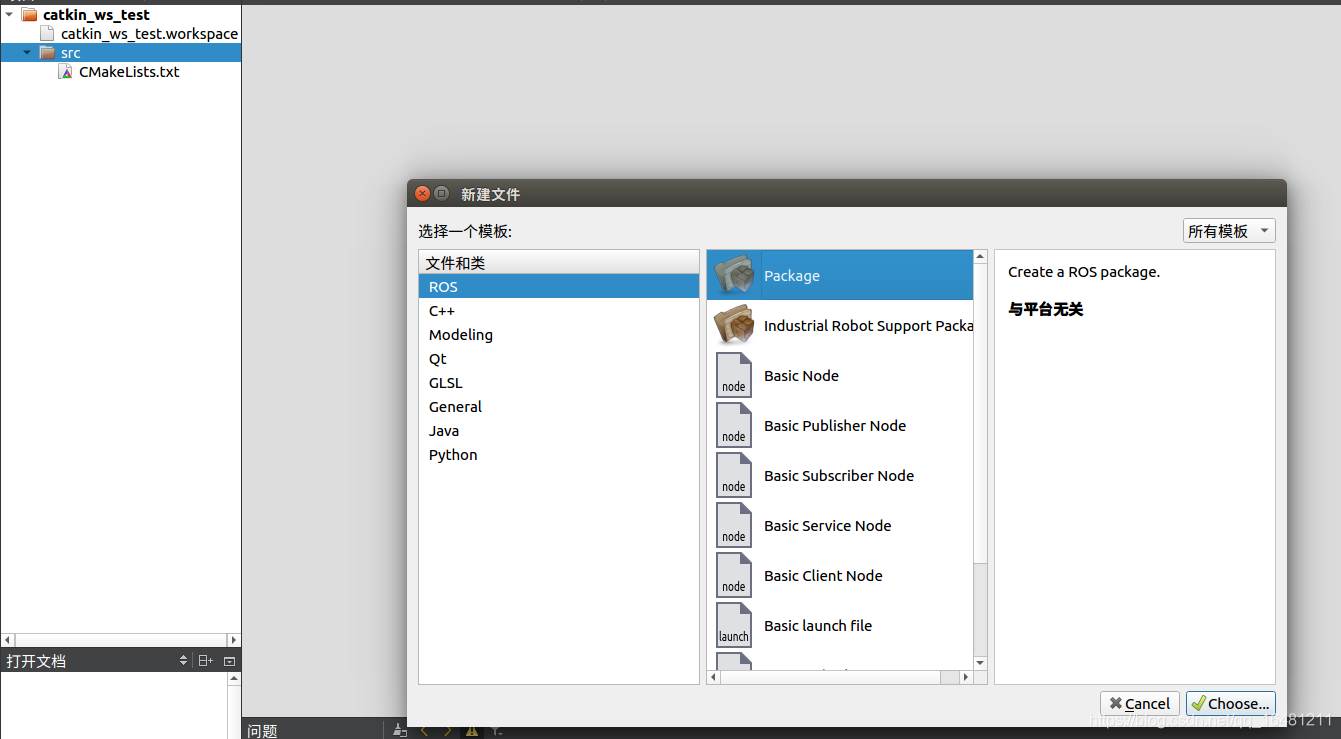
在弹出的界面选择turtlenode和catkin_make
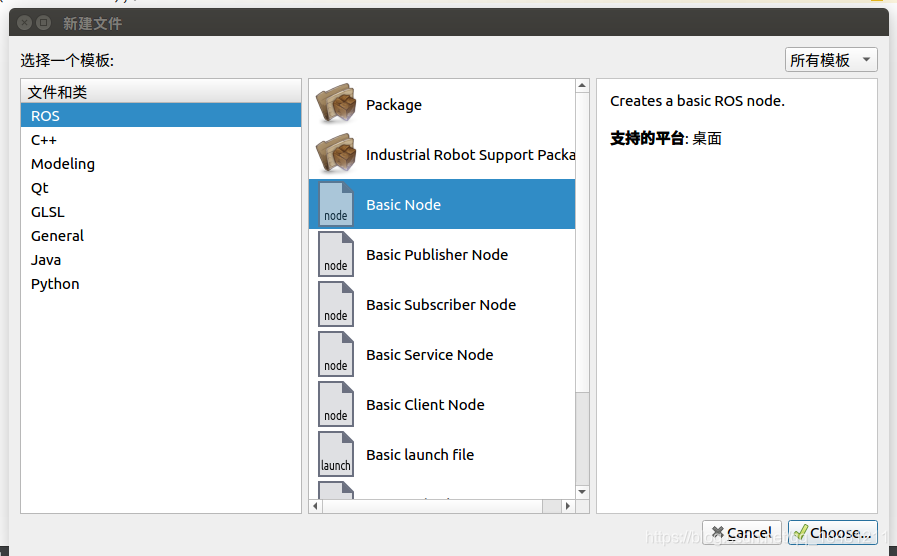
接着添加节点,ROS->Basic Node.
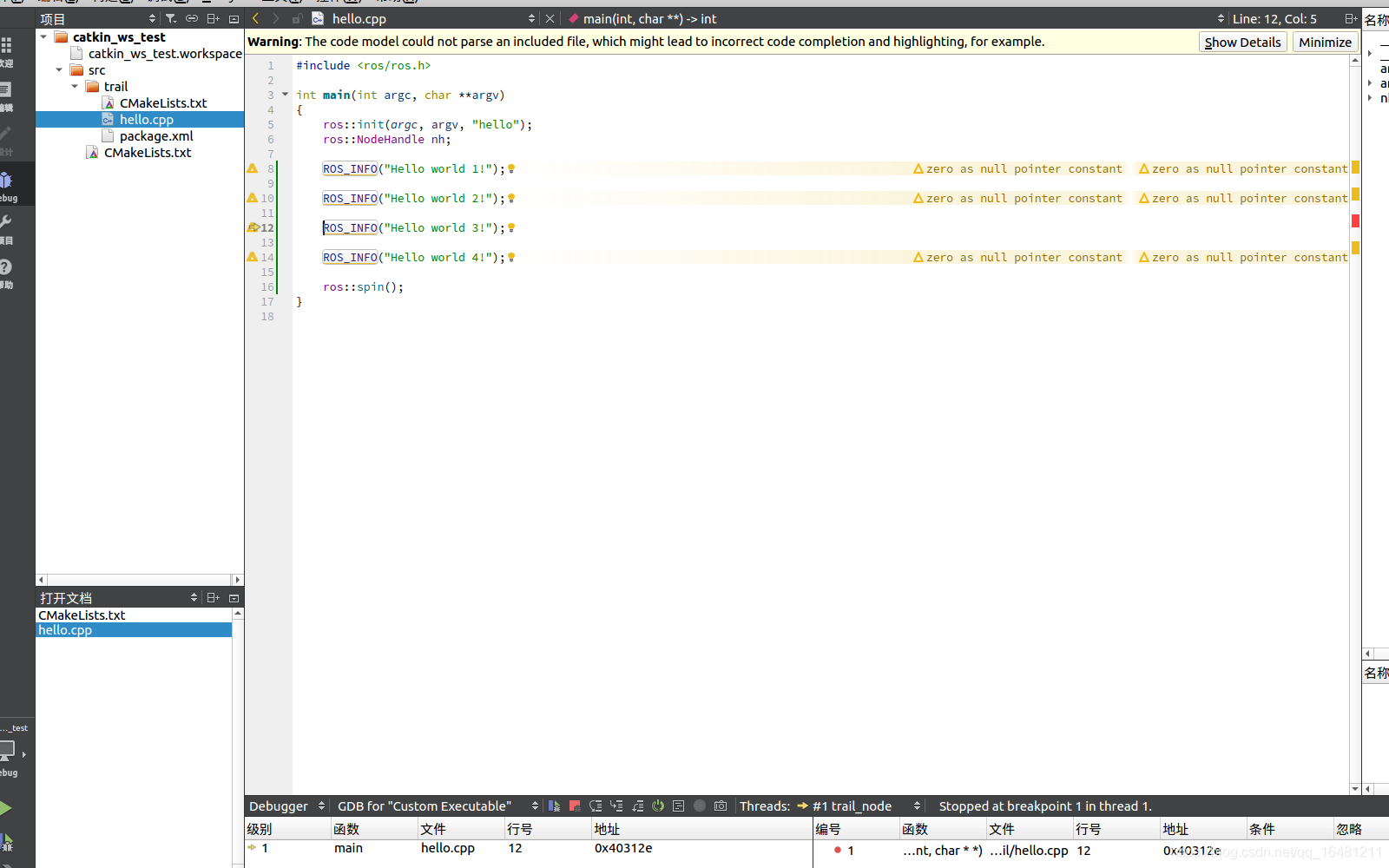
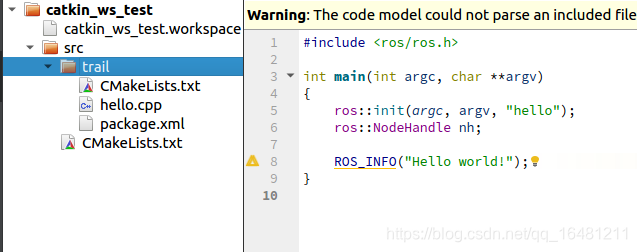
生成的hello.cpp节点的文件
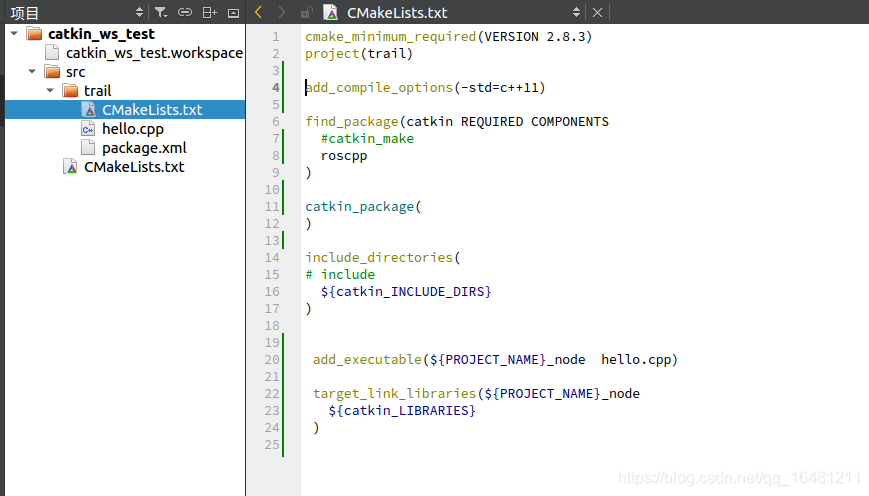
修改CMakeLists.txt文件
运行roscore
source工作空间后运行节点。

断点调试