1、可观性1.1、可观性定义 客观性即指通过系统输出能否反映系统初始状态(状态的变化能否由输出反映出来); 形式上如果根据一系列的输出及控制输入可以在有限时间内唯一地确定系统状态则系统客观; 其定义中存在三个关键词:动态系统、状态、输出。 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3150浏览 0评论1482个赞
目录树莓派控制无人机实现定点降落(二)——树莓派或ubuntu安装mavros1、安装依赖2、创建……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3173浏览 0评论156个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2141浏览 0评论1862个赞
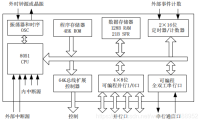
目录一.单片机概述……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2215浏览 0评论2061个赞
文章目录1.总体策略上台策略:……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2521浏览 0评论766个赞
……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1794浏览 0评论1983个赞
准备工作……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2494浏览 0评论524个赞
目录树莓派控制无人机实现定点降落(三)——PX4固件源码编译中的坑1、建立工作空间,克隆固件源码2……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3525浏览 0评论1137个赞
文章目录准备工作generalizedInverseKinematics……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3244浏览 0评论359个赞
模块十分简单,可以介绍的内容很少。包括两个部分:计算目标物中心距图片中心的偏差,对应cabin_vision/object_deviation;PID跟踪控制,对应cabin_behaviors/pid_tracking。 一、偏差计算 输入输出: ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2064浏览 0评论2013个赞
我会通过本系列文章,详细介绍如何从零开始用51单片机去实现智能小车的控制,在本系列的上一篇文章中介绍了如何让小车动起来,本文作为本系列的第二篇文章,主要介绍让小车实现自动避障所涉及的一些传感器,如超声波模块、漫反射光电管、4路红外寻迹避障传感器的介绍及使用。 对于熟悉这些模块的读……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2109浏览 0评论2829个赞
目录 一.单片机指令简述 二.汇编指令 指令中的常用符号 三.寻址方式 寻址方式与相应的存储器的空间、寄存器 1.寄存器寻址方式 2.寄存器间接寻址 3.立即寻址 4.直接寻址 5.基址寄存器+变址寄存器的间接寻址 6.相对寻址 7……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3193浏览 0评论2364个赞
新建**.sh文件,写入以下内容: #!/usr/bin/expectset timeout 3spawn ssh username@ipexpect "*password*"send "passwor……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3363浏览 0评论1413个赞
机械臂的控制原本使用的就是ROS进行的,奈何实验室机械臂上买的机械二指夹爪并不支持ROS平台,及没有对应的模型文件和控制的包,因此控制机械手爪就需要其他办法。 所使用的机械手爪为nGripper90,如下图所示,查看手爪的用户手册发现,其配套包括ModBus/Tcp……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3689浏览 0评论2836个赞
目录树莓派控制无人机实现定点降落(四)——gazebo无人机定点降落仿真环境搭建1、编译px4_sitl_default……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2592浏览 0评论932个赞
一、TF2简介 Since ROS Hydro, tf&n……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3442浏览 0评论2082个赞
一、MATLAB基本功能1、MATLAB帮助 (1)help函数 help可用于查看对应函数的帮助文本 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1965浏览 0评论1656个赞
我会通过本系列文章,详细介绍如何从零开始用51单片机去实现智能小车的控制,在本系列的上一篇文章中介绍了3种可用来让小车实现避障的传感器,本文作为本系列的第三篇文章,主要介绍如何让车实现自动避障。 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2165浏览 0评论899个赞
符号意义 x ^ \hat{x}……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3267浏览 0评论2384个赞
上一节内容中我总结了卡尔曼滤波器的推导及其扩展的过程SLAM14讲学习笔记(六)后端(最难一章:卡尔曼滤波器推导、理解以及扩展),我认为那部分内容直接接触是比较难以理解的。但……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2058浏览 0评论751个赞
此文目的:旨在详细描述如何自制一个小型ROS机器人,实现自制ROS机器人的移动控制、建图、自主导航,文章从硬件到软件均有详细讲述,提供全套下位机、上位机程序源码,SolidWorks三维建模,CAD图纸,电路图纸,我的本科毕设论文、挑战杯说明书、PP……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2482浏览 0评论528个赞
目录 树莓派控制无人机实现定点降落(五)——设计地标以及gazebo导入模型方法1、将地标图像导入gazebo中的方法:……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1960浏览 0评论1608个赞
我会通过本系列文章,详细介绍如何从零开始用51单片机去实现智能小车的控制,在本系列的上一篇文章中介绍了如何让小车实现自动避障,本文作为本系列的第四篇文章,主要介绍蓝牙模块的使用,如何通过蓝牙进行数据传输,并通过手机向蓝牙模块发送指令,从而达到使用手机控制智能小车的运……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2871浏览 0评论1953个赞
本系列文章主要介绍基于A*算法的路径规划的实现,并使用MATLAB进行仿真演示。本文作为本系列的第一篇文章主要介绍如何进行环境的创建,还有一定要记得读前言!!! ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2733浏览 0评论1925个赞
一、简述 一般来说移动机器人的运动模型可分为完整约束和非完整约束。 完整约束(Holonomic,控制数=自由度):可以用一个由位形变量……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2706浏览 0评论592个赞
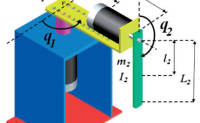
本示例说明了如何解决四连杆机构(简单的平面闭合链机构)的逆运动学问题。 Robotics System Toolbox™不直接支持闭环机制。但是,可以使用运动学约束来近似……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1749浏览 0评论951个赞
在上一个博文中介绍了一个简单的目标识别的例子,在这篇博客中,例如是别的结果,完成机械臂的抓取控制,主要进行程序的分析和学习。 包含的头文件: #include <……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1903浏览 0评论1078个赞
学习到这里为止,SLAM14讲的主要知识就不多了。这章的内容书里只是做了一个简述,因此读起来也没有什么难度。但是初学者不仔细看就很容易犯糊涂。 回环检测的意义: 1.给后端的Pos……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2867浏览 0评论2518个赞
在上一讲中我们介绍了视觉SLAM十四讲的前3讲:基本框架和刚体运动的描述方式(R矩阵,T矩阵)。 面临的问题: 当我们对刚体的运动进行表示了之后,接下来要解决的问题是对得到的表示进行估计和优化。因为……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3223浏览 0评论915个赞
这次的笔记我把13讲的部分内容总结一下。 虽然slam的名字叫同步定位与构图,但是书中建图的内容却少的可怜。据此高博给出了自己的解释,意为在定位的过程中,我确定了很多特征点的世界坐标,那这个过程其实就是建图了。一个点云中,每个已知世界坐标系的特征点给它的位置塞一个点,那这不就是建……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2936浏览 0评论1803个赞
文章目录 bsplinepolytraj cubicpolytraj quinticpolytraj rottraj transformtraj trapveltraj 参考 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3589浏览 0评论2149个赞
SLAM:同时定位和建图(Simultaneous Localization and Mapping)。 希望机器人从未知环境的未知地点出发,在运动过程中通过重复观测到的地图特征(比如,墙角,柱子等)定位自身位置和姿……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2691浏览 0评论2303个赞
多姿态插补用于多个连续的姿态,此处采用Squad插值,贝塞尔相关参考深入理解贝塞尔曲线……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2141浏览 0评论1743个赞
1. SDF建模简介 在使用Gazebo仿真的时候,需要先对环境和机器人进行建模,而Gazebo仿真建模的标准格式就是SDF(sdfor……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3001浏览 0评论2477个赞
本系列文章主要介绍基于A*算法的路径规划的实现,并使用MATLAB进行仿真演示。本文作为本系列的第二篇文章主要介绍如何利用A * 算法进行路径规划。 ……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2833浏览 0评论1212个赞
主题 本章我们要学习的是运动物体的跟踪,现代图像处理中经典的几种跟踪方法主要是:meanshift(均值漂移),Camshift(meanshi……继续阅读 » 开心洋葱 5年前 (2021-04-26) 1756浏览 0评论2190个赞
引言 从这节开始,我们就要去学习单片机相关的知识了,不过不光是单片机,更多的应该是教同学们如何去做一个完整的项目,我们就以STM32F103RB……继续阅读 » 小白 5年前 (2021-04-26) 2113浏览 0评论505个赞
目录背景所需硬件与软件理论基础一阶低通滤波卡尔……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2041浏览 0评论1697个赞
单目稠密重建和深度滤波器的内容我已经总结在了上一个学习笔记中(SLAM14讲学习笔记(九)单目稠密重建、深度滤波器详解与补充(纠正第13讲 建图 中的错误)),因为在那一部分内容中高博讲的……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2975浏览 0评论363个赞
Matlab中fmincon函数的使用1. 介绍2. 语法3. 示例3.1……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2176浏览 0评论188个赞
目录树莓派控制无人机实现定点降落(六)——地标识别及控制算法的实现1、地标识别2、控制算法……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2871浏览 0评论979个赞
机器人轨迹规划:三次样条曲线文章目录机器人轨迹规划:三次样条曲线 <……继续阅读 » 开心洋葱 5年前 (2021-04-26) 3086浏览 0评论1790个赞
系统辨识专题(一)——MATLAB系统辨识工具箱的使用案例 在建立多旋翼无人机系统模型的基础上,我们能够更有针对性地设计对应的控制器,为无人机系统故障诊断提供判据。本文将结合系统Matlab自带的系统辨识工具箱阐述一个简单的过程模型的完整辨识过程。 在使用系统辨……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2470浏览 0评论2097个赞
ROS服务 服务(services)是节点之间通讯的另一种方式。服务允许节点发送请求(request) 并获得一个响应(response) 使用 rosservice ross……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2353浏览 0评论2728个赞
本文为……继续阅读 » 开心洋葱 5年前 (2021-04-26) 2651浏览 0评论2730个赞