第一次编程操作UR10协作机器人的记录 1 引言 UR机器人参考:丹麦优傲机器人 ……继续阅读 » 寒鸦Glory 5年前 (2021-04-26) 2736浏览 0评论2957个赞
路径规划算法总结 目录1 自主机器人近距离操作运动规划体系········1.1 单个自主机器人的规划体系········1.2 多自主机器人协同规划体系2 路径……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 1816浏览 0评论1162个赞
在我们平常在做目标检测或者目标追踪时,经常要画出目标的运动轨迹图,基本大致思路如下,检测出目标,建立一个空的队列,检测出目标就将目标的中心点给加到队列中。最后写一个循环,调用opencv cv2.line函数画出上一帧与这一帧的轨迹图,我们线看下效果吧(小编不上相) ……继续阅读 » xiaorun 5年前 (2021-04-26) 3901浏览 0评论270个赞
机器人学中经典教材 《Introduction to Robotics: Mechanics and Control》,也就是John Craig的中文版《机器人学导论》,刚来实验室的时候,就发现师兄们人手一本了,某些章节自己啃也是有点难度的,之 前在 ……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2722浏览 0评论1085个赞
参考:https://github.com/jkjung-avt/tf_trt_models/tree/tf-1.8 在……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 2157浏览 0评论581个赞
描述关于A_算法的一些实现,……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 2495浏览 0评论1510个赞
1 概述 UR机器人作为目前使用广泛的协作机器人,其开放了基于TCP/IP的远程控制功能,提供了多个多类型的端口,用于工业总线控制,或者用户自行编程控制,以下记录整理此方面的信息。 2 UR机器人通信2.1 ……继续阅读 » 寒鸦Glory 5年前 (2021-04-26) 3451浏览 0评论994个赞
此示例演示了如何在高速公路驾驶场景中规划局部轨迹。 本示例使用参考路径和障碍物动态列表来生成自我车辆的替代轨迹。 自我车辆从DrivingScenario对象浏览提供的驾驶场景中定义的交通。 车辆会根据成本,可行性和无碰撞运动在自适应巡航控制,车道变更和车辆跟随操纵之间进行……继续阅读 » 柯南404 5年前 (2021-04-26) 2291浏览 0评论144个赞
正运动学解 ……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3039浏览 0评论2220个赞
最近nvidia官网发布了专门针对tx2的tensorflow-gpu安装包,这样将TX2上部署tensorflow的难度大大降低,只需几个步骤即可。 1 刷机jetpack3.3首先TX2必须是3……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 2329浏览 0评论570个赞
第4节我们说到ROS与APP之间的地图交互与坐标系变换,今天我们来实现一个与ROS地图对接的APP,实现以下功能: 1)机器人的ROS地图能够通过网络方式传输到APP上,同时APP上能显示机器人位置 2)使用者绘制APP中地图上的某个区域,这个点能在R……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 3439浏览 0评论1210个赞
目录1. 全球机器人四……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 1593浏览 0评论1430个赞
飞思卡尔智能车—电磁循迹(组别通用)详细参赛要求请以智能车官方为准,此文章仅分享本人参赛经验,开源硬件电路设计,供大家学习! 电磁循迹部分设计思路:电感采集电磁信号,放大,整……继续阅读 » 鲁棒最小二乘支持向量机 5年前 (2021-04-26) 2365浏览 0评论211个赞
摘要……继续阅读 » Z 5年前 (2021-04-26) 2611浏览 0评论1186个赞
环境:ubuntu14.04 软件:opencv3.3 +pycharm 好久没有写博客了,手都感觉好生疏,最近一直在研究工控机,水下机器人等,好不容易闲下来,没办法呀,继续前行吧,前面一直说双目测距,但没有高速大家如何获得这个双目标注得图像,我在这把这代码贴一下吧,获得这些双目……继续阅读 » xiaorun 5年前 (2021-04-26) 3412浏览 0评论155个赞
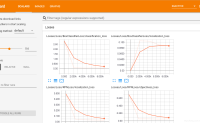
函数近似方法有模型数值迭代算法、回合更新算法和时序差分更新算法,在每次更新价值函数时都只更新某个状态(或状态动作对)下的价值估计。但是,在有些任务中,状态和动作的数目非常大,甚至可能是无穷大,这时,不可能对所有的状态(或状态动作对)逐一进行更新……继续阅读 » 柯南404 5年前 (2021-04-26) 2067浏览 0评论2725个赞
ROS TF2介绍tf2 1、安装演示示例2、运行演示示例3、如何实现的4、tf2 工具……继续阅读 » 月照银海似蛟龙 5年前 (2021-04-26) 3130浏览 0评论1054个赞
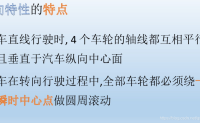
汽车的转向过程就是阿克曼转向。其也是移动机器人的一种运动模式之一。阿克曼基本原理:汽车在行驶过程中(直线和转弯时候),每个车轮的运动估计必须符合他的自然运动轨迹,从而保证轮胎与地面始终处于纯滚动。具有特……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 3407浏览 0评论2436个赞
……继续阅读 » 长风弦歌 5年前 (2021-04-26) 2800浏览 0评论356个赞
目录一、编码器简介二、编码器工作原理三、编码器分类(1)增量式编码器……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 3182浏览 0评论706个赞
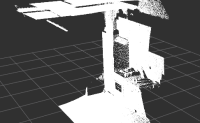
1. 简介 在移动机器人建图和导航过程中,提供相对准确的里程计信息非常关键,是后续很多工作的基础,因此需要对其进行测试保证没有严重的错误或偏差。实际中最可能发生错误的地方在于机器人运……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 2879浏览 0评论2651个赞
传递函数num=[b1 b2 b3 …… bm+1]de……继续阅读 » 合工大机器人实验室 5年前 (2021-04-26) 2809浏览 0评论1360个赞
强化学习(英语:Reinforcement learning,简称RL)是机器学习中的一个领域,强调如何基于环境而行动,以取得最大化的预期利益。其灵感来源于心理学中的行为主义理论,即有机体如何在环……继续阅读 » Stan Fu 5年前 (2021-04-26) 1895浏览 0评论2864个赞
二维点云ICP原理推导描述ICP是迭代就近点算法,大部分的实现代码都是基于PCL点云库的,也就是三维点云的匹配实际上,二维点云数据也算是常见的数据类型,比如移动机器人经常使用的单线雷达。本文就是二维点云ICP的原……继续阅读 » 绿竹巷人 5年前 (2021-04-26) 2646浏览 0评论1631个赞
用tensorflow训练模型时,很自然的想到要同时验证模型的效果,得到mAP、loss等参数,从而判断什么时候可以终止训练,防止欠拟合或者过拟合。幸运的是,tensorflow官方已经给出了验证的脚本eval.py,网上找了很多资料,都没有人能把使用方法……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 1693浏览 0评论2937个赞
ROS……继续阅读 » 锡城筱凯 5年前 (2021-04-26) 2523浏览 0评论835个赞
我先上下结果图吧,效果勉强还行,在这里我只训练了行人,官网的weights是coco数据集训练的,有80类; ……继续阅读 » xiaorun 5年前 (2021-04-26) 2949浏览 0评论1506个赞
在《TensorFlow之目标检测API接口调试(超详细)》文章中,介绍了tensorflow API接口调用方法,详细……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 3546浏览 0评论316个赞
我们已经了解了ROS地图的特征。现在我们假设已知在地图上某个位置有一台机器人,我们要将ROS地图转换为图片,同时机器人在地图上的位置传输至外部用户终端;使用户终端能够实时显示机器人位置。 我们先从用户终端(Windo……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 3204浏览 0评论1031个赞
……继续阅读 » 长风弦歌 5年前 (2021-04-26) 2369浏览 0评论672个赞
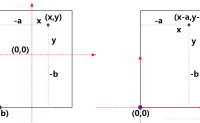
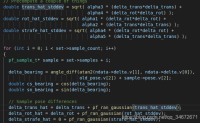
AMCL中轮式里程计误差模型参数用了很久的AMCL,也偶尔会思考odom_alpha1,odom_alpha2,odom_alpha3,odom_alpha4这些如何参数如何根据我们轮子的精度来给出理论……继续阅读 » yuanguobin01 5年前 (2021-04-26) 2634浏览 0评论1489个赞
本片博客 讲解 如何添加 一个 固定的坐标系 到TF2 1、为什么添加 坐标系对于很多……继续阅读 » 月照银海似蛟龙 5年前 (2021-04-26) 2486浏览 0评论220个赞
写在前面购物机器人既然要购物,那么购物车自然是必不可少的,根据比赛要求,开始时购物车需要与机器人分离,所以就需要机器人主动去连接购物……继续阅读 » better_coder 5年前 (2021-04-26) 1902浏览 0评论1051个赞
@[toc]……继续阅读 » 一抹烟霞 5年前 (2021-04-26) 2534浏览 0评论1573个赞
写在前面我参加了浙江省那个机器人竞赛的购物赛,现在还是在比赛的前期准备阶段,在这个购物赛的规则当中,设计的机器人最基本的要求就是需要能够巡这些黑色背景下的白线……继续阅读 » better_coder 5年前 (2021-04-26) 2116浏览 0评论2822个赞
引言……继续阅读 » 小白 5年前 (2021-04-26) 2765浏览 0评论511个赞
1 概述UR机器人提供了多种端口,用于控制和读取机器人信息,本人整理了相关信息,见文章《UR机器人通信端口和协议》。本人使用了3000……继续阅读 » 寒鸦Glory 5年前 (2021-04-26) 3056浏览 0评论883个赞
70年代末,随着计算机的应用和传感技术的发展,移动机器人研究又出现了新的高潮。 特别是在80年代中期,设计和制造机器人的浪潮席卷全世界。一大批世界著名的公司开始研制移动机器人平台,这些移动机器人主要作……继续阅读 » Techblog of HaoWANG 5年前 (2021-04-26) 2619浏览 0评论1384个赞
3.动态规划3.1 介绍……继续阅读 » Stan Fu 5年前 (2021-04-26) 1971浏览 0评论494个赞
在一台机器人中不可避免地会具有很多种传感器(雷达,视觉,深度…);在机器人的导航中对这些传感器的融合,并形成完整的导航策略是很关键的。对于一台室内/室外机器人来讲,传感器的融合主要分为两个方面:融合定位,使用GPS/IMU/里程计/视觉/……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 2024浏览 0评论208个赞
参考:https://blog.csdn.net/u010099080/ar……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 2533浏览 0评论808个赞
……继续阅读 » 吴凯荣 5年前 (2021-04-26) 3238浏览 0评论1327个赞
这片博客 教你 如何使用TF2 实现 监听 获得 一个 坐标变换在上一篇博客 创建了一个TF2 的 广播者 ,来发布一个 乌龟的位置 到 TF2, 这个博客 将 创建 一个 TF2 的 监听者 来开始使用TF2.……继续阅读 » 月照银海似蛟龙 5年前 (2021-04-26) 3270浏览 0评论2873个赞
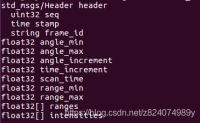
2020年得第一篇博客,真是好长时间没发博客,这半年里毕业到一家v2x公司之后比较忙,不发博客内心是比较着急,总觉得没记录点啥。年底了,写点东西吧,不然csdn恐怕要取消我博客专家的评级了。接下俩我分两章介绍一下文章,小编手里有两个传感器,6个激光雷达与摄……继续阅读 » xiaorun 5年前 (2021-04-26) 2749浏览 0评论632个赞
参考:https://github.com/juandes/pikachu-detection/blo……继续阅读 » 宗孝鹏 5年前 (2021-04-26) 2935浏览 0评论2676个赞












![[强化学习实战]函数近似方法与原理](https://blog.75271.com/wp-content/themes/com75271/timthumb.php?src=/Uploads/Editor/202103/20210318_59417.png&h=123&w=200&q=90&zc=1&ct=1)