说起全国大学生智能汽车竞赛,古月君有滔滔不绝的内容可以分享,自大二开始,我从懵懂少年跟着师兄比赛,到自己挑大梁拿到国一,再到带队挣得全国前三,基本就是大学本科的青春。……继续阅读 » 古月 5年前 (2021-04-26) 3250浏览 0评论1426个赞
前言 17年参加北邮智能车双车组,18年加入北邮机器人队,19年参加北邮智能车室外光电创意组,感触最深就是北邮机器人队……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 1743浏览 0评论1763个赞
一、前言 上一节:……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2405浏览 0评论1504个赞
前言 上一节:……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 3663浏览 0评论1012个赞
前言 上一节:……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 3592浏览 0评论1012个赞
前言 上一节:……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2846浏览 0评论1309个赞
前言 上一节:……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2978浏览 0评论2718个赞
前言 上一节:……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 3626浏览 0评论886个赞
前言 上一节:北邮智能车仿真培训(七……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 3271浏览 0评论2527个赞
前言 前面的教程基本上是常规组别的,主要用于给大家写下摄像头的算法然后体会下PID,今天的教程是面向室外光电创意组的,……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 3357浏览 0评论509个赞
一、前言 操作系统:ubuntu16.04……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2084浏览 0评论1774个赞
一、先看效果……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2252浏览 0评论154个赞
一、前言 之前的教程使用Python代码实现了四轮车的巡线,阿克曼模型确实在方仿真上效果都好多了,今天教大家将代码从python修改成……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2115浏览 0评论1346个赞
前言本来想直接用百度智能车比赛的数据集训练,但是发现在ROS中搭建红绿灯模型和提供的数据集在颜色亮度外形上都有点差别… …无奈从创建数……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2113浏览 0评论1614个赞
前言第一节: 基于paddledetecti……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2939浏览 0评论2430个赞
前言第一节: 基于paddledetecti……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2211浏览 0评论1133个赞
前言 今天推出了官方的仿真文件,我也参与了部分仿真模型的设计,提供一个简单的参考思路。 ……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2877浏览 0评论1425个赞
前言 上一节教程地址:室外光电仿真教程一 参考教程地址……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 1697浏览 0评论2357个赞
ROS学习(问题)笔记一、安装Ubuntu; ……继续阅读 » lovely_him 5年前 (2021-04-26) 2805浏览 0评论1330个赞
前言 系列教程一:仿真赛教程一<……继续阅读 » 布剪刀石头 5年前 (2021-04-26) 2816浏览 0评论1469个赞
最常见的移动机器人模型,差速,麦克纳姆轮的全向,阿克曼车式等。 ……继续阅读 » zhangrelay 5年前 (2021-04-26) 2933浏览 0评论2644个赞
前言这是我在古月居的第一篇文章,我想介绍一下我们组去年的参赛经历,以及整个做比赛的过程。内含干货,包括我们控制算法的设计思路等~~结尾……继续阅读 » 小白 5年前 (2021-04-26) 2687浏览 0评论2093个赞
前言 本来这期内容是讲解我们设计的仿真思路的,但是为了不影响比赛公平性,这部分内容就放在提交代码之后啦~~ 这两天很多同学问了我很多问题,其中比……继续阅读 » 小白 5年前 (2021-04-26) 3053浏览 0评论2421个赞
第十五届全国大学生智能车竞赛 ……继续阅读 » 古月居官方 5年前 (2021-04-26) 2812浏览 0评论2715个赞
前言 本篇主要介绍我们队今年参赛的方案以及搭建过程,这篇本来是赛前一周就写好了的,不过还是等到赛后再来发了。体验完比赛,不得不感叹一下,大佬是真……继续阅读 » 小白 5年前 (2021-04-26) 2365浏览 0评论1596个赞
前言 本篇内容主要是解读ROS的国赛任务以及概述几种实现方案。也祝大家都能取得满意的成绩呀~ ……继续阅读 » 小白 5年前 (2021-04-26) 2797浏览 0评论1402个赞
前言 国赛篇的第一期我们实现了最基础的多点导航,并利用rviz标定分段目标点进行导航。但是官方补充完规则之后,这个方案就无法用来进行完成比赛了。……继续阅读 » 小白 5年前 (2021-04-26) 2672浏览 0评论859个赞
功能包地址:https://download.csdn.net/download/qq_42145185/12256533 <……继续阅读 » 很不专业 5年前 (2021-04-26) 2398浏览 0评论505个赞
前言 紧张刺激的ROS组全国总决赛于26号落下了帷幕。我也有幸能够前往现场参赛体验一番。下面给大家带来一些现场的照片,视频,末尾会对路径算法进行……继续阅读 » 小白 5年前 (2021-04-26) 1808浏览 0评论117个赞
准备工具:需要备份的SD卡,读卡器,PC(Linux) 1、安装必备工具软件: sudo apt-get install dosfstools dump parted kpartx 2、将装载sd卡的读卡器插入PC,查看sd卡使用……继续阅读 » cabinx 5年前 (2021-04-26) 1761浏览 0评论1109个赞
楼主是19安徽赛区室外电磁小白一枚,由于学校历届组别使用的都是摄像头,电磁用的很少,所以今年几乎从零开始。在这半年的智能车调试中也走了不少弯路,有了一些收获,现将参赛总结记录如下: 文章目录 ……继续阅读 » 千里常安 5年前 (2021-04-26) 2874浏览 0评论2035个赞
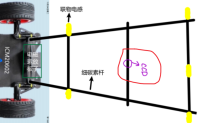
本文介绍智能车D车模后座支架的一种设计方案,经过我实际测试很牢固,特别稳, 就算车发生碰撞,也不会掉落或者偏移,除非车模被损坏。 ……继续阅读 » 慕羽★ 5年前 (2021-04-26) 2223浏览 0评论2290个赞
第十六届智能车竞赛规则……继续阅读 » 小白 5年前 (2021-04-26) 2211浏览 0评论2800个赞
直立车涉及到的很……继续阅读 » 慕羽★ 5年前 (2021-04-26) 3339浏览 0评论2661个赞
写在前面很高兴加入古月居这个大家庭,希望我的加入能给这个优秀的社区添砖加瓦~φ(≧ω≦*)♪ 回到正题,十六届智能车竞赛也是提上日程,这次卓大没有鸽我们,早早的就出了规则,今年的基础四轮组相较于去年也是有了一些变化,主要体现在以下……继续阅读 » better_coder 5年前 (2021-04-26) 1943浏览 0评论1054个赞
写在前面 我将我的参赛代码已经在GitHub上进行了开源,欢迎大家下载 ……继续阅读 » better_coder 5年前 (2021-04-26) 3302浏览 0评论2160个赞
写在前面……继续阅读 » better_coder 5年前 (2021-04-26) 3173浏览 0评论2924个赞
写在前面 我将我的参赛代码已经在GitHub上进行了开源,欢迎大家下载 ……继续阅读 » better_coder 5年前 (2021-04-26) 2929浏览 0评论633个赞
写在前面 我将我的参赛代码已经在GitHub上进行了开源,欢迎大家下载 ……继续阅读 » better_coder 5年前 (2021-04-26) 3638浏览 0评论749个赞
写在前面 我将我的参赛代码已经在GitHub上进行了开源,欢迎大家下载 ……继续阅读 » better_coder 5年前 (2021-04-26) 2025浏览 0评论1833个赞
写在前面我将我的参赛代码已经在GitHub上进行了开源,欢迎大家下载 ……继续阅读 » better_coder 5年前 (2021-04-26) 2832浏览 0评论1518个赞
写在前面 我将我的参赛代码已经在GitHub上进行了开源,欢迎大家下载 ……继续阅读 » better_coder 5年前 (2021-04-26) 2741浏览 0评论290个赞
低成本3D空间导航/测绘机器人——从零开始……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 3120浏览 0评论819个赞
写在前面 在上一节中我们讲到了测绘小车的基本架构。今天我们来一……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 2566浏览 0评论1979个赞
写在前面 上一小节我们讲到了机器人的轮胎(编码器)驱动,本节我们来介绍: 机器人上舵机的工作原理,硬件……继续阅读 » 麻辣小蘑菇 5年前 (2021-04-26) 1745浏览 0评论964个赞